基于改进金鹰优化算法的电力系统经济负荷调度优化方法
1.本发明涉及电力系统技术领域,尤其涉及基于改进金鹰优化算法的电力系统经济负荷调度优化方法。
背景技术:
2.随着电力系统中经济负荷调度(eld)问题的复杂性和发电成本效益要求的提高,在求解电力系统负荷经济运行的经济负荷调度(eld)问题时面临着复杂的计算时间问题。采用额外的方法如梯度计算二次规划等处理eld问题,会存在计算时间复杂度高、精度不够、收敛速度慢、容易陷入局部最优等缺陷和不足。
3.电力系统的负荷调度决定了在给定时段内各发电机组的输出。提供负荷需求,使各支路能够在满足实际极限的情况下分担负荷需求,降低整个系统的总运行成本。盈利负荷调度是现代电力系统的关键问题,对提高电力系统的经济性起着至关重要的作用。考虑上下限限制和功率均衡要求的电力系统负荷经济调度模型。在实际应用中,经济负荷调度(eld)问题也考虑了许多电力系统运行中的实际非线性约束,如机组禁区约束、阀点效应和有功出力约束等。因此,电力系统的经济负荷调度问题是一个非线性的、高度非线性的多约束优化问题。阀点效应通过在流程中引入大量的局部优化,使eld问题的解决变得复杂。
4.群智能优化算法是解决复杂非线性问题的最有效的方法之一。群智能优化算法广泛应用于工程技术、医疗、社会、金融等各个领域。近年来在电气工程领域,如电力系统的经济负荷调度模型中,智能群优化方法已成为解决严重约束非线性和非凸优化问题最有前途的优化技术之一。在现代电力系统研究中,一个热门的领域是应用各种算法来解决电力系统中有利可图的调度挑战,同时提高准确度和实用性。
5.典型的群智能算法有粒子群优化算法(pso)、差分进化算法(de)、人工免疫算法(aia)和飞蛾火焰优化算法(mfo),它们在计算优化中得到了广泛的应用。金鹰优化算法是一种新提出的群智能优化算法。geo的核心灵感是金鹰在不同的螺旋轨迹阶段调整速度以供狩猎的策略。geo算法具有参数少、易于实现等优点,可很好地解决大型电力系统经济负荷调度优化等非线性平衡问题。但同其他智能算法一样,geo算法随着迭代次数的增加,金鹰的种群多样性降低,算法容易陷入局部最优,全局搜索能力降低,最终使得算法收敛速度慢、收敛精度低。
技术实现要素:
6.本发明的目的在于提供基于改进金鹰优化算法的电力系统经济负荷调度优化方法。
7.本发明采用的技术方案是:
8.基于改进金鹰优化算法的电力系统经济负荷调度优化方法,其包括以下步骤:
9.步骤s1,以发电机组最小总发电成本为目标函数,建立电力系统经济负荷调度数学模型;电力系统经济负荷调度数学模包括发电成本和约束条件;
10.步骤s2,将tent混沌映射策略引入进金鹰优化算法,并初始化金鹰位置和相关初始数据;
11.tent映射的迭代公式为:
[0012][0013]
式中:本发明β取0.4,经过迭代产生混沌序列[z1,z2,
…
,z
p
],z
t
为经过迭代产生混沌序列的第t个值,最后生成均匀分布的初始种群,表达式为:
[0014]
xi=ls+zi(u
s-ls)
[0015]
式中:ls和us分别表示搜索空间的下限和上限;zi为tent混沌序列中的第i个值;xi为种群的第i个个体。
[0016]
步骤s3,将反向精英学习策略引入到金鹰优化算法主循环中,并利用指数递减函数求取攻击系数pa和巡航系数pc;
[0017]
步骤s4,电力系统经济负荷调度模型在约束条件下基于改进金鹰优化算法进行寻优,利用最优解计算发电机组最小发电成本。
[0018]
进一步地,步骤s1中的eld目标函数表示为:
[0019][0020]
其中:f
cost
为系统发电总成本;t为总调度时段数,在处理静态优化问题时,t为1;m为系统中的机组台数;pi为机组i的有功出力值;fi(pi)表示机组的发电成本。
[0021]
进一步地,目标成本函数的数学模型分为无阀点效应和考虑阀点效应两类:
[0022]
无阀点效应时,火电机i组的发电成本由其耗量特性函数表示,数学表达式为:
[0023][0024]
式中:ai,bi,ci为机组i的耗量特性系数;
[0025]
考虑阀点效应时,则目标函数可表示为:
[0026][0027]
式中:ei、fi为机组i的阀点效应系数;p
imin
为机组i的有功出力下限。
[0028]
进一步地,经济负荷分配的约束条件包括功率平衡约束、机组出力约束、爬坡约束和机组运行禁运区约束。
[0029]
(1)系统功率平衡约束由机组的有功出力,系统网损和系统总负荷所组成,其表达式如下:
[0030][0031]
式中:p
loss
为系统网损;p
load
为系统总负荷。
[0032]
(2)机组出力约束的表达式如下:
[0033]
p
imin
≤pi≤p
imax
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0034]
式中:p
imin
,p
imax
分别为机组i的有功出力下限和有功出力上限。
[0035]
(3)机组爬坡约束的表达式如下:
[0036]-dri≤p
ti-p
(t-1)i
≤uriꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0037]
式中:dri,uri分别为机组i的出力降速极值和出力增速极值;p
0i
为机组i的前一时
刻的有功出力。
[0038]
(4)机组运行禁区约束表示为:
[0039][0040]
式中:p
imin
是机组i出力下限;pi为机组i的有功出力值;是机组i的运行禁区总数中的最小禁运区下限;是机组i的第j-1个运行禁区的上限;是机组i的第j个运行禁区的下限;ng是机组i的运行禁区总数;是机组i的运行禁区总数中的最大禁运区上限;p
max
是第i个机组的出力上限。
[0041]
进一步地,系统网损由b系数法求得p
loss
,
[0042][0043]
式中:b
ij
,b
oi
,b
oo
为网损系数。
[0044]
进一步地,β取值为0.4。
[0045]
进一步地,步骤s3具体包括以下步骤:
[0046]
步骤s3-1,将当前金鹰种群个体以适应度值升序排列,后选出前n个适应度值(n表示精英个体的数量)较优的金鹰个体作为精英群体;
[0047]
进一步地,精英个体数一般取n=0.1
×
种群大小p。
[0048]
步骤s3-2,求取精英群体的反向解,各反向个体的计算公式为:
[0049][0050]
式中为精英群体的反向解,x
em
(t)为精英群体,l(t)和u(t)分别表示当前金鹰种群中各维参数在不同时刻的最小值和最大值向量;
[0051]
步骤s3-3,利用各精英解与其反向解生成n个均匀分布的新个体,计算公式为:
[0052][0053]
式中s
em
(t)表示第m个个体;
[0054]
步骤s3-4,求取金鹰当前的攻击向量,计算公式如下:
[0055][0056]
式中:ai是金鹰i的攻击向量,是金鹰f迄今为止访问的最佳位置(猎物),是金鹰i的当前位置;
[0057]
步骤s3-5,求取巡航超平面上目标点,表达式如下:
[0058][0059]
式中:ck为目标点c的第k个元素,aj为攻击向量ai的第j个元素,d为式(10)右侧,为攻击向量ai的第k个元素,k为固定变量的指标;
[0060]
步骤s3-6,对攻击系数pa和巡航系数pc进行一个非线性的调整改变,具体公式如下:
[0061]
[0062][0063]
式中:和分别为攻击系数pa的最大值和最小值:和分别为巡航系数pc的最大值和最小值;α为调节系数;t和t分别为当前迭代次数和最大迭代次数。
[0064]
进一步地,步骤s3-5的具体步骤如下:
[0065]
步骤s3-5-1,计算得出金鹰i在迭代t中的巡航向量的超平面,计算公式如下:
[0066][0067]
式中:aj为攻击向量ai的第j个元素,t为当前迭代次数,为当前迭代次数所对应的攻击向量ai的第j个元素,ai={a1,a2,...,an}是金鹰i的攻击向量;xj为决策变量向量xi的第j个元素,xi={x1,x2,...,xn}是金鹰i的决策变量向量,即金鹰当前位置;为金鹰所选猎物的位置x
*
的第j个元素,为金鹰所选猎物的位置;
[0068]
步骤s3-5-2,在迭代中鹰的巡航超平面中得到金鹰i的巡航向量ck,巡航向量ck的公式如下:
[0069][0070]
式中:ck为目标点c的第k个元素,aj为攻击向量ai的第j个元素,d为式(10)右侧,为攻击向量ai的第k个元素,k为固定变量的指标;
[0071]
步骤s3-5-3,得到找到巡航超平面上的随机目标点,巡航超平面上目标点的表达式如下:
[0072][0073]
进一步地,步骤s3-6中的c
max
取值为1,c
min
取值为0.5,α取值为4。
[0074]
进一步地,步骤s4具体包括以下步骤:
[0075]
步骤s4-1,使用改进金鹰优化算法对所述当前种群进行精英反向学习处理,得到新种群;
[0076]
步骤s4-2,根据当前迭代次数更新攻击系数和巡航系数;攻击系数pa和巡航系数pc[0077]
步骤s4-3,每只金鹰基于迄今为止所找到的最佳解决办法从整个鸟群的记忆中选择一个目标猎物;
[0078]
步骤s4-4,计算每只金鹰的攻击向量和巡航向量并求出δx;
[0079][0080]
迭代中金鹰i的步长向量定义为式(14)。
[0081][0082]
式中:为迭代t中的攻击系数,为迭代t中的巡航系数,调整了金鹰受到攻击和巡航的影响。和是元素位于区间[0,1]内的随机向量;
[0083]
迭代t+1中金鹰的位置只需将迭代t中的步长向量加到迭代t中的位置即可计算出来。
[0084][0085]
步骤s4-5,判断所有金鹰个体是否符合eld问题的禁运区约束、缓变区约束和功率和功率平衡约束;当都符合时,则继续循环执行步骤s4-6;当有不符合约束条件时,则将不符合的金鹰个体进行重新随机处理;直至所有个体符合约束条件将继续进行循环;
[0086]
步骤s4-6,将金鹰当前位置代入目标函数,计算全部金鹰当前适应度值并与记忆位置进行对比,判断当前适应度值是否优于保存的最优适应度值;是则,将当前适应度值作为最优适应度值;否则,保持当前最优适应度值不变;
[0087]
步骤s4-7,将迭代种群作为新的当前种群,判断是否满足迭代结束条件(达到最大迭代次数);是则,输出最优个体作为最优方案;否则,返回执行步骤s4-1。
[0088]
进一步地,步骤s4-4中为和的中间值通过线性跃迁来计算。
[0089][0090]
式中:t表示当前迭代次数,t表示最大迭代次数,和分别为攻击系数pa的初始值和最终值,和分别为巡航系数pc的初始值和最终值。
[0091]
本发明采用以上技术方案,对geo算法改进,利用tent混沌映射具有均匀性和有序性的特点,提高初始种群的多样性;利用精英反向群策略能充分利用优秀个体的特点,扩大种群的搜索空间;将原geo算法的线性攻击和巡航权重做了非线性改进,提高了算法的收敛速度,最后将改进的geo算法应用于经济负荷调度优化模型求解。测试函数和ieee 15机与ieee40机测试系统的仿真结果表明该方案合理有效,较现有群智能优化算法作用下的多机电力系统相比,使用改进的金鹰优化算法(igeo)优化的经济负荷调度的多机多节点电力系统具有更优越的系统动态性能。
附图说明
[0092]
以下结合附图和具体实施方式对本发明做进一步详细说明;
[0093]
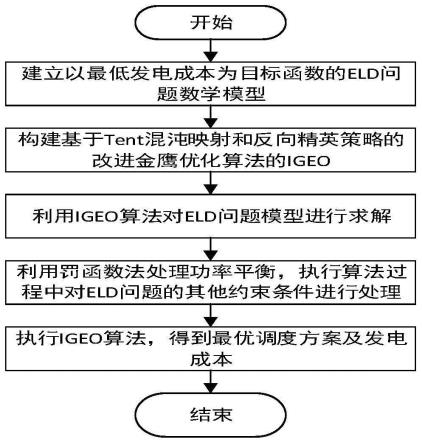
图1为本发明基于改进金鹰优化算法的电力系统经济负荷调度优化方法的主要步骤流程示意图;
[0094]
图2为改进金鹰优化算法流程图;
[0095]
图3为改进金鹰优化算法的eld应用流程图;
[0096]
图4为matyas迭代收敛图;
[0097]
图5为sphere迭代收敛图;
[0098]
图6为three-hump camel迭代收敛图;
[0099]
图7为ackley 1迭代收敛图;
[0100]
图8为penalized 1迭代收敛图;
[0101]
图9为periodic迭代收敛图;
[0102]
图10为ieee 15测试机组迭代图;
[0103]
图11为ieee 40测试机组迭代图。
具体实施方式
[0104]
为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图对本技术实施例中的技术方案进行清楚、完整地描述。
[0105]
如图1所示,本发明公开了基于改进金鹰优化算法的电力系统经济负荷调度优化方法,其包括以下步骤:
[0106]
步骤s1,以发电机组最小总发电成本为目标函数,建立电力系统经济负荷调度数学模型;电力系统经济负荷调度数学模包括发电成本和约束条件;
[0107]
步骤s2,将tent混沌映射策略引入进金鹰优化算法,并初始化金鹰位置和相关初始数据;
[0108]
tent映射的迭代公式为:
[0109][0110]
式中:本发明β取0.4,经过迭代产生混沌序列[z1,z2,
…
,z
p
],z
t
为经过迭代产生混沌序列的第t个值,最后生成均匀分布的初始种群,表达式为:
[0111]
xi=ls+zi(u
s-ls)
[0112]
式中:ls和us分别表示搜索空间的下限和上限;zi为tent混沌序列中的第i个值。
[0113]
步骤s3,将反向精英学习策略引入到金鹰优化算法主循环中,并利用指数递减函数求取攻击pa向量和巡航向量pc;
[0114]
步骤s4,电力系统经济负荷调度模型在约束条件下基于改进金鹰优化算法进行寻优,利用最优解计算发电机组最小发电成本。
[0115]
下面就本发明的具体原理做详细说明:
[0116]
为确定负荷在运行机组之间的经济分配,机组运行成本一般表达成机组出力的函数。若将电力系统的成本函数看成一系列二次多项式的累加求和,则eld目标函数可表示为:
[0117][0118]
其中:f
cost
为系统发电总成本;t为总调度时段数,在处理静态优化问题时,t为1;m为系统中的机组台数;pi为机组i的有功出力值;fi(pi)表示机组的发电成本。
[0119]
本发明采用单一能源发电的静态电力系统经济调度问题,目标成本函数的数学模型分为无阀点效应和考虑阀点效应两类,可以分别由式(2)、式(3)表示。
[0120]
通常情况下,火电机i组的发电成本可由其耗量特性函数表示,数学表达式为:
[0121][0122]
式中:ai,bi,ci为机组i的耗量特性系数。
[0123]
若计及阀点效应,则目标函数可表示为:
[0124][0125]
式中:ei、fi为机组i的阀点效应系数;p
imin
为机组i的有功出力下限。
[0126]
最后引入电力系统经济负荷调度的约束条件,经济负荷分配问题包含有多组约束条件,其中包括功率平衡约束、机组出力约束、爬坡约束和机组运行禁运区约束。
[0127]
(1)系统功率平衡约束
[0128]
系统功率平衡约束由机组的有功出力,系统网损和系统总负荷所组成。
[0129][0130]
式中:p
loss
为系统网损;p
load
为系统总负荷。其中系统网损由如下所示的b系数法求得。
[0131][0132]
式中:b
ij
,b
oi
,b
oo
为网损系数。
[0133]
(2)机组出力约束
[0134]
p
imin
≤pi≤p
imax
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0135]
式中:p
imin
,p
imax
分别为机组i的有功出力下限和有功出力上限。
[0136]
(3)机组爬坡约束
[0137]-dri≤p
ti-p
(t-1)i
≤uriꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0138]
式中:dri,uri分别为机组i的出力降速极值和出力增速极值;p
0i
为机组i的前一时刻的有功出力。
[0139]
(4)机组运行禁区约束
[0140]
当火电机组处于运行状态时,在其运行区间内会存在一些子区间,当火电机组运行在这些子区间内时,会导致机组轴承振动幅度过大,因此在机组运行时需要在运行区间内设置运行禁区以避开这些子空间,防止机组轴承过度震动。设置了运行禁区的运行区间可表示为:
[0141][0142]
式中:p
imin
是机组i出力下限;pi为机组i的有功出力值;是机组i的运行禁区总数中的最小禁运区下限;是机组i的第j-1个运行禁区的上限;是机组i的第j个运行禁区的下限;ng是机组i的运行禁区总数;是机组i的运行禁区总数中的最大禁运区上限;p
max
是第i个机组的出力上限。
[0143]
金鹰优化算法基本原理:在2021年mohammadi-balani abdolkarim等人提出了金鹰优化算法(geo),在geo算法中,金鹰和目标猎物是重要的群体。金鹰个体代表优化问题的候选解,猎物则是金鹰到当前所处迭代次数为止选择围绕其进行巡航行为的目标。因此,猎物可以作为金鹰在可行搜索空间中巡航的“风向标”,每个金鹰围绕在一个猎物的周围巡航,在迭代前期巡航意向更强的时候,当找到一个更好的解时,就更新自己的记忆最优猎物。
[0144]
求取金鹰当前的攻击向量:
[0145][0146]
式中:ai是金鹰i的攻击向量,是金鹰f迄今为止访问的最佳位置(猎物),是金鹰i的当前位置。
[0147]
在计算巡航向量前,必须先计算出切超平面的方程。公式(10)为n维空间中超平面
方程的标量形式。
[0148][0149]
式中:为法向量,为变量向量,为超平面上的任意点,
[0150]
如果考虑(金鹰的位置)的位置视为超平面的任意点,并考虑(攻击向量)视为超平面的法线,则可以根据公式(11)得出(金鹰i在迭代t中的巡航向量)的超平面。
[0151][0152]
式中:ai={a1,a2,...,an}是金鹰i的攻击向量,xi={x1,x2,...,xn}是金鹰i的决策变量向量(即金鹰当前位置),金鹰所选猎物的位置。
[0153]
计算了迭代中鹰的巡航超平面,就可以在这个超平面中找到金鹰i的巡航向量了,如公式(12)所示。
[0154][0155]
式中:ck为目标点c的第k个元素,aj为攻击向量ai的第j个元素,d为式(10)右侧,为攻击向量ai的第k个元素,k为固定变量的指标。
[0156]
找到巡航超平面上的随机目标点。方程(5)显示了巡航超平面上目标点的一般表示。
[0157][0158]
金鹰的位移包括攻击和矢量。将迭代中金鹰i的步长向量定义为式(14)。
[0159][0160]
式中:为迭代t中的攻击系数,为迭代t中的巡航系数,调整了金鹰受到攻击和巡航的影响。和是元素位于区间[0,1]内的随机向量。
[0161][0162]
迭代t+1中金鹰的位置只需将迭代t中的步长向量加到迭代t中的位置即可计算出来。
[0163][0164]
如果金鹰的新位置的适应度优于其记忆中的位置,则将这只鹰的记忆更新为新的位置。否则,记忆位置保持不变,但鹰将驻留在新的位置。在新的迭代中,每只金鹰从种群中随机选择一只金鹰围绕其记忆最优的位置盘旋,计算攻击向量,计算巡航向量,最后计算步长向量和下一次迭代的新位置。执行此循环,直到满足任何终止条件为止。
[0165]
geo使用pa和pc从巡航勘探转向开发。该算法从低pa和高pc开始。随着迭代的进行,pa逐渐增加,pc逐渐减少。这两个参数的初始值和最终值都由用户定义。中间值可以通过式(17)所示的线性跃迁来计算。
[0166][0167]
式中:t表示当前迭代次数,t表示最大迭代次数,和分别为攻击倾向pa的初始值和最终值,和分别为巡航倾向pc的初始值和最终值。
[0168]
取和这表示pa在第一次迭代中设置为0.5,在最后一次迭代中线性下降到2。pc也是如此,它在第一次迭代中以1开始,并在最后一次迭代中线性降低至0.5。
[0169]
改进的金鹰优化算法:分别在金鹰优化算法的种群初始化、循环阶段和攻击与巡航向量更新3个环节加入改进措施,有利于提高算法的寻优效率和跳出局部最优解的能力,形成了改进的金鹰优化算法。
[0170]
tent混沌初始化种群:金鹰优化算法采用随机初始化种群的方法,难以保留种群的多样性,寻优效果较差。tent混沌映射具有随机性、均匀性和有序性的特点,利用tent混沌映射可以提高初始种群在搜索空间内的种群多样性,使蜻蜓个体更加接近最优解,以提高算法的收敛效率。tent映射的迭代公式为:
[0171][0172]
式中:本发明β取0.4,经过迭代产生混沌序列[z1,z2,
…
,z
p
],z
t
为经过迭代产生混沌序列的第t个值,最后生成均匀分布的初始种群,表达式为
[0173]
xi=ls+zi(u
s-ls)
[0174]
式中:ls和us分别表示搜索空间的下限和上限;zi为tent混沌序列中的第i个值,xi为种群的第i个个体。
[0175]
精英反向学习策略:反向精英学习策略引入到金鹰优化算法主循环中是在算法的循环阶段中引入反向精英策略来提高种群的多样性,减少算法陷入局部最优解的可能,反向学习策略(opposition-based learning,obl)是由tizhoosh提出的,是将可行解及其反向解同时进行评价,选择其中最优的进入下-代。精英反向群策略在obl的基础上结合了精英算法的思想,在各精英与其反向解之间生成一组均匀分布的精英反向群,选择适应度较好的b组解构成新种群。具体步骤如下:
[0176]
步骤1:将当前金鹰种群个体以适应度值升序排列,后选出前n个适应度值(n表示精英个体的数量)较优的金鹰个体作为精英群体,精英个体数一般取n=0.1
×
种群大小p
[0177]
步骤2:求取精英群体的反向解,各反向个体的计算公式为
[0178][0179]
式中为精英群体的反向解,x
em
(t)为精英群体,l(t)和u(t)分别表示当前金鹰种群中各维参数在不同时刻的最小值和最大值向量。
[0180]
步骤3:利用各精英解与其反向解生成n个均匀分布的新个体,计算公式为:
[0181][0182]
式中s
em
(t)表示第m个个体。
[0183]
指数递减函数改进攻击与巡航向量更新:利用指数递减函数求取攻击系数pa和巡
航系数pc是对如图2所示的攻击系数pa和巡航系数pc求取方法进行改进,以此来加快算法的收敛速度,在原金鹰算法中的攻击系数pa和巡航系数pc都是线性变化的值,在实际情况中,随着算法迭代次数的增加,算法收敛的速度会慢慢降低,是呈曲线下降的。算法中攻击系数pa和巡航系数pc收敛的速度和算法整体的收敛速度不一致,这就会降低算法的收敛速度,从而影响算法的整体效率。在本发明中,引用了指数递减策略,通过下面公式对攻击系数pa和巡航系数pc进行一个非线性的调整改变:
[0184][0185][0186]
式中:和分别为攻击系数pa的最大值和最小值:和分别为巡航系数pc的最大值和最小值;α为调节系数;t和t分别为当前迭代次数和最大迭代次数。
[0187]
试验仿真佐证
[0188]
测试函数:为了验证提出的改进的金鹰优化算法(igeo)的性能,将igeo与geo进行对比。6个标准测试函数如表1所示,其中f1~f3为单峰函数,f4~f6为多峰函数。各算法的仿真参数设置为:geo和igeo中各算法最大迭代次数均为600,种群大小为30。将4种优化算法在6个标准测试函数上进行30次寻优,测试结果如表2所示,迭代曲线如图4~图9所示。
[0189]
表1:标准测试函数
[0190][0191]
为了避免试验的偶然性,将每个函数独立运行30次,各个算法最终寻优的平均值与误差结果如表2所示。
[0192]
表2:函数测试对比结果
[0193][0194][0195]
由表中数据可以清楚地看到,与其余原金鹰优化算法相比,igeo算法的最优适应
度值最接近目标值,且其标准差最小。由各测试函数的收敛图中可以清楚地看到,igeo的收敛速度和避免陷入局部最优解的能力均优于geo。
[0196]
为了展示本发明优异性,本实施例仿真分别采用ieee15机组和40机组发电机测试系统,分别使用粒子群优化算法(pso)、灰狼优化算法(gwo)、金鹰优化算法(geo)以及基于本发明的改进金鹰优化算法(igeo)分别得到的经济调度统计结果进行对比,同时引入阀点效应,由于机组数过多,暂不考虑电网损耗,系统的基本参数设置为常规设置。
[0197]
ieee15机测试系统:在仿真时,ieee15机组测试系统最大迭代次数设置为t=700次,种群大小设置为30,15机组测试系统在静态系统的基础上还考虑了缓变率约束,即爬坡约束。其总负荷总需求是2630mw。各机组均考虑出力上下限、考虑禁运区约束以及考虑网损。为避免算法随机性问题,分别对四种算法独立执行50次并求取平均值进行对比。ieee15机测试系统的设置参数如发电机组系统禁区、系数b:[b
ij
,b
oi
,b
oo
]和功率损耗因子见表3,15机组测试系统参数见表4。
[0198]
四种算法在15机组测试系统的结果如表5所示,迭代对比图见图10。
[0199]
表3:15机组测试系统中发电机组禁区的设置
[0200][0201]
功率损耗因子b表示为:
[0202][0203]b0i
=[-0.0001
ꢀ‑
0.0002 0.0028
ꢀ‑
0.0001 0.0001
ꢀ‑
0.0003
ꢀ‑
0.0002
ꢀ‑
0.0002 0.0006 0.0039
ꢀ‑
00017 0.0000
ꢀ‑
0.0032 0.0067
ꢀ‑
0.0064]
[0204]boo
=0.0055
[0205]
表4:15机组测试系统参数
[0206]
机组α($/mw2)β($/mw)γ($)ur(mw/h)lr(mw/h)p0p
min
(mw)p
max
(mw)10.00029910.167180120400150455
20.00018310.25748012030015045530.0011268.83741301301052013040.0011268.83741301301002013050.00020510.4461801209015047060.00030110.16308012040013546070.0003649.85488012035013546580.00033811.222765100956030090.00080711.21736010010525162100.00120310.71756010011025160110.00358610.21868080602080120.0055139.92308080402080130.00037113.12258080302585140.00192912.13095555201555150.00444712.43235555201555
[0207]
表5:15台机组结果对比
[0208][0209][0210]
ieee40机测试系统:在仿真时,ieee40机组测试系统最大迭代次数设置为t=1000次,种群大小设置为50,40机组测试系统为静态系统,不考虑机组爬坡约束,其总负荷总需求是10500mw,不考虑禁运区约束以及忽略网损。40机测试系统比15机测试系统存在更多局部最优解的较大型系统,所以在算法计算40机组的过程中更能体现算法的鲁棒性。在本发明中,考虑到模型的实用性,计算40机测试系统时考虑“阀点效应”。为避免算法随机性问题,分别对四种算法独立执行50次并求取平均值。40机组测试系统参数见表6。
[0211]
四种算法在40机组测试系统的结果如表7所示,迭代对比图见图11。
[0212]
表6:40机组测试系统参数
[0213]
[0214][0215]
表7:40台机组结果对比
[0216]
算法平均值最大值最小值标准差pso142942.5153461.3135543.64042.266gwo130614.1133261.3128039.91235.554geo131311.2134812.8128427.51391.697igeo130423.9132697.8128037.1959.5933
[0217]
从图10、图11中的曲线和表5、表7中的数据可知,在高维度算例中,igeo算法相比于其他算法,优化配置能力明显更强。仿真实验的运行结果显示:igeo算法所得最优值的平均值、最大值和最小值均在所列算法中最低,其收敛性能优秀,其标准差也比其他算法低,说明在高维度下,igeo算法仍能保持较好的鲁棒性。
[0218]
综上所述,测试结果验证了利用改进的金鹰优化算法求解电力系统经济调度问题
的优越性和有效性,所取得的最优分配解的收敛精度更高,所需要的发电成本更低。
[0219]
本发明采用以上技术方案,对geo算法改进,利用tent混沌映射具有均匀性和有序性的特点,提高初始种群的多样性;利用精英反向群策略能充分利用优秀个体的特点,扩大种群的搜索空间;将原geo算法的线性攻击和巡航权重做了非线性改进,提高了算法的收敛速度,最后将改进的geo算法应用于经济负荷调度优化模型求解。测试函数和ieee 15机与ieee40机测试系统的仿真结果表明该方案合理有效,较现有群智能优化算法作用下的多机电力系统相比,使用改进的金鹰优化算法(igeo)优化的经济负荷调度的多机多节点电力系统具有更优越的系统动态性能。
[0220]
显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。通常在此处附图中描述和示出的本技术实施例的组件可以以各种不同的配置来布置和设计。因此,本技术的实施例的详细描述并非旨在限制要求保护的本技术的范围,而是仅仅表示本技术的选定实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1