一种人工与自动驾驶混行下的地铁接驳公交智能调度方法
1.本发明涉及城市智能公共交通技术领域,更具体的说是一种人工与自动驾驶混行下的地铁接驳公交智能调度方法。
背景技术:
2.城市轨道交通在现代化城市公交系统中承担着越来越重要的作用。但是,轨道交通建设的高成本和长周期使其覆盖率受到很大限制,反之,常规公交系统具有线网覆盖率高、线路布设灵活等特点,所以常规公交与轨道交通能否高效接驳显得尤为重要。目前,大多数对接驳公交的研究在全人工驾驶环境下针对于线路设计和调度单独优化,缺乏对公交时刻表、公交容量、线路设计、车辆分配之间动态相互作用的考虑。同时,城市区域内时常会出现交通出行时空分布不均匀现象,比如在高峰时段客流快速增大导致乘客等车时间过长和公交车异常拥挤,在非高峰时段客流较少导致公交车载客量较低,浪费大量社会资源。公交公司面对这种情况一般采取在不同时间段进行不同的发车频率,但是由于车辆的容量是固定的,无法彻底的平衡公司运营费用和乘客等车时间。新一代信息技术和人工智能的快速发展及在交通领域的深度融合促进了自动驾驶公交的概念的生成。自动驾驶公交在提高公交运营的安全性、消除驾驶员成本、减少能源消耗以及提高对车辆的调度的灵活性等方面表现出巨大优势,除此之外,自动驾驶公交最大的特点是其容量可以根据乘客的需求量的变化而变化,即根据需求量变化通过对单元小车进行组装或拆卸对公交车的容量进行动态变化,这一功能可由模块化自动驾驶车实现。
3.因此,如何实现人工与自动驾驶混行下的地铁接驳公交智能调度是本领域技术人员亟需解决的问题。
技术实现要素:
4.有鉴于此,本发明提供了一种人工与自动驾驶混行下的地铁接驳公交智能调度方法,面向人工与自动驾驶混行的交通环境,在规划区域内现有的人工和自动驾驶公交车的数量下,对接驳公交线路设计、车辆分配、发车时刻与发车类型进行动态联合优化,从而可以降低公交公司运营成本,减少乘客出行费用,提高出行舒适度。
5.为了实现上述目的,本发明采用如下技术方案:
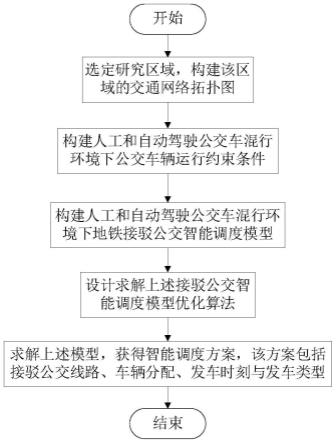
6.一种人工与自动驾驶混行下的地铁接驳公交智能调度方法,具体步骤如下:
7.步骤1:选定研究区域,构建研究区域的交通网络拓扑图;
8.步骤2:根据交通网络拓扑图构建人工和自动驾驶公交车混行环境下接驳公交车辆运行约束条件;
9.步骤3:根据接驳公交车辆运行约束条件构建接驳公交智能调度模型;
10.步骤4:对接驳公交智能调度模型构建整体优化算法,通过求解整体优化算法得到智能调度方案,该方案包括接驳公交线路、车辆分配、发车时刻与发车类型。
11.优选的,步骤1具体实现过程包括:
12.步骤11:选择一个需要研究的被接驳的地铁站点,该地铁站点的进出客流量满足开设接驳公交的条件;
13.步骤12:根据该地铁站点附近区域的道路分布和用地类型的实际情况来选择该地铁站点合理的接驳范围;
14.步骤13:根据实际道路分布选择满足接驳公交运行条件的候选路段,将候选路段的交叉路口设定为公交站点;
15.步骤14:以一个楼栋单元作为一个出行需求点,调查统计研究区域内的需求点的数量和位置;
16.步骤15:根据该区域人口调查的gis数据,可以得到各需求点的人口;每个需求点的出行需求量与该需求点的人口成正比;
17.步骤16:采集被接驳的地铁站点各时段进出站客流量,假设居民到地铁站乘坐地铁的数量与人口与成正比,将进出站客流量按照每个需求点人口进行比例分配,得到每个需求点的出行需求量;
18.步骤17:根据确定的地铁站点、候选路段、公交站点和需求点属性构建网络拓扑图。需求点属性包括需求点数量、位置和出行需求量。
19.优选的,步骤2的具实现过程体包括:
20.步骤21:将研究周期t0离散化为j+1个均匀分布的时间节点,离散化时间节点集合表示为t=[0,1,2,
…
,j],则单位区间时间为δt=t0/j;
[0021]
步骤22:预设接驳公交智能调度模型的三个决策变量;
[0022]
设置第一个决策变量为x
ijh
;当x
ijh
=1时,表示路段ij作为接驳公交线路h的接驳路段;否则x
ijh
=0,表示路段ij不是接驳公交线路h的接驳路段;被接驳公交线路选中的路段是接驳路段,接驳路段组成了接驳公交线路。
[0023]
第二个决策变量为表示服务于接驳公交线路h的类型为v的车辆在t时发车;否则表示服务于接驳公交线路h的类型为v的车辆在t时不发车;
[0024]
第三个决策变量为和分别表示分配给接驳公交线路h的人工驾驶公交和模块化自动驾驶车的数量;
[0025]
步骤23:设定接驳公交车辆运行约束条件,包括:
[0026]
接驳公交线路h上的公交站点集合为:
[0027][0028]
其中,l是接驳公交线路集合,eh表示接驳公交线路h的终点站点;
[0029]
接驳公交线路具有连续性,表示为:
[0030][0031]
其中,sh表示接驳公交线路h的起始站点;
[0032]
接驳公交线路中途不会产生环路:
[0033][0034][0035]
对接驳公交线路长度进行约束:
[0036][0037]
其中,表示接驳公交线路h上相邻公交站点i和j之间的距离,单位是千米;d
min
和d
max
分别表示接驳公交线路的最小长度和最大长度,单位是千米;
[0038]
接驳公交线路的非直线系数不超过规范中规定的最大值:
[0039][0040]
其中,d(sh,eh)代表接驳公交线路起讫点间的空间直线距离;
[0041]
每条接驳公交线路被调度的人工驾驶公交和模块化自动驾驶车的车辆总数等于分配给该线路的车辆数:
[0042][0043][0044]
被调度的人工驾驶公交和模块化自动驾驶车的车辆总数等于该研究区域所拥有的车辆数量:
[0045][0046][0047]
每条接驳公交线路在每个时间点至多发一种类型的车:
[0048][0049]
每条接驳公交线路至少有一种类型的车服务:
[0050][0051]
车辆r在接驳公交线路h的第一个站点的发车时间:
[0052][0053]
其中,bh是接驳公交线路h上公交车发车序列集合;
[0054]
车辆r离开站点i的时间为车辆r到达站点i的时间和在站点i停留时间之和:
[0055][0056]
车辆r在站点i的停留时间为在站点i乘坐车辆r的人数乘以平均上车时间:
[0057][0058]
接驳公交线路h上在站点i乘坐车辆r的人数:
[0059][0060]
其中,是需求点k的到达率函数。
[0061]
第0辆车离开接驳公交线路h上起始站点的时间是研究的起始时间:
[0062][0063]
车辆r到达i+1站点的时间应为车辆离开站点i时间和在两站点之间行驶时间之和:
[0064][0065]
在接驳公交线路h上相邻两辆车到达起始站点的间隔不小于公交系统要求最小值:
[0066][0067]
在接驳公交线路h上车辆r离开站点i的时间要早于车辆r-1:
[0068][0069]
优选的,步骤3的具体实现过程包括:
[0070]
综合了运营方和乘客双方的利益进行考虑,构建的目标函数要最小化整个公交系统的不同类型公交车的运营成本、乘客出行成本和未被服务乘客惩罚成本的总和,乘客出行成本包括步行成本、等车成本和车上成本;
[0071]
相对于人工驾驶公交,自动驾驶公交通过消除驾驶员的需求来降低或消除车上乘务成本,从而降低每辆公交车的运营成本,可以用固定成本参数γ(0<γ<1)来表示;另一方面,由于v个模块化自动驾驶车连接形成一个类型v的自动驾驶公交,它们的速度和加速度是一致的,同时也降低了整车的阻力,可以降低整车的能耗,这一特性由经济规模参数η(0<η<1)反映;
[0072]
公交车的单位时间运营成本:
[0073][0074]
其中,v=0时表示人工驾驶公交的运营成本,v=m》0表示m辆模块化自动驾驶车连接在一起组成容量更大的自动驾驶公交的运营成本;表示车辆运行的固定成本;分别表示人工驾驶公交和自动驾驶公交的边际成本;和分别表示人工驾驶公交和模块化自动驾驶车的最大容量;γ表示固定成本参数;η表示经济规模参数;
[0075]
公交车运营成本:
[0076][0077]
其中,表示接驳公交线路h上相邻站点i和i+1之间的公交行驶时间,单位是分钟;
[0078]
需求点k中的乘客可乘坐公交车的公交站点集合表示为:
[0079][0080]
其中,表示从需求点k到公交站点i之间的距离,单位是千米;k
*
表示公交站点最大服务半径,单位是千米;k表示所有需求点的集合;
[0081]
公交站点i服务的需求点集合表示为:
[0082][0083]
乘客等车时间表示为:
[0084][0085]
在接驳公交线路h上运营的公交车r在接驳路段ij时车上人数表示为:
[0086][0087]
在接驳路段ij上车辆r中乘客的不舒适系数表示为:
[0088][0089]
其中,和分别表示接驳公交线路h上第r辆公交车的座位数和最大容量;α和β是相应的参数;
[0090]
乘客车上时间表示为:
[0091][0092]
其中,σ是待标定参数,为了计算简便,取σ=1;
[0093]
乘客步行时间:
[0094][0095]
其中,表示从需求点k到公交站点i之间的平均步行时间,单位是分钟;
[0096]
未被服务乘客的人数:
[0097]
[0098]
被服务需求点的集合:
[0099][0100]
接驳公交的联合优化模型为:
[0101]
minmb+ω1mw+ω2m
t
+ω3mf+ω4m
p
(32)
[0102]
s.t.
[0103]
eqs.(1)-(20)
[0104]
其中,ω1、ω2、ω3分别为乘客等车时间、车上时间、步行时间的平均金钱价值系数;ω4为未被服务乘客的惩罚费用。平均金钱价值系数与时间的乘积为成本,ω1mw表示等车成本,ω2m
t
表示车上成本,ω3mf表示步行成本,未被服务乘客的惩罚费用与未被服务乘客的人数的乘积为未被服务乘客惩罚成本。
[0105]
优选的,所述智能调度模型的求解过程主要通过两个阶段来实现,步骤4的具体实现过程包括:
[0106]
步骤41:第一阶段使用改进的遗传算法来求解接驳公交发车时刻和发车类型联合优化问题,由于发车类型和发车时刻主要影响公交车的运营成本,乘客等车成本以及车上成本,所以定义接驳公交发车时刻和发车类型联合优化问题的目标函数如下:
[0107]
z1=mb+ω1mw+ω2m
t
ꢀꢀ
(33)
[0108]
适应度函数为
[0109]
fitness1=1/z1ꢀꢀ
(34)
[0110]
步骤42:将接驳公交发车时刻和发车类型联合优化问题目标函数得到的最优解作为第二阶段的输入,再用改进的遗传算法来求解接驳公交的运行线路设计、车辆分配问题,该问题直接影响到公交车的运营成本、乘客的步行成本以及未被服务乘客惩罚费用,由于公交车的运营成本在第一阶段已经得到,所以首先计算线路设计和车辆分配目标函数z2,根据接驳公交发车时刻和发车类型联合优化问题的最优解,以及乘客的步行成本以及未被服务乘客惩罚成本构建的整体目标函数如下:
[0111]
z2=ω4mf+ω5m
p
ꢀꢀ
(35)
[0112]
z=z1+z2ꢀꢀ
(36)
[0113]
线路设计和车辆分配适应度函数为:
[0114][0115]
步骤43:采用改进的双遗传算法求解接驳公交智能调度模型,输出智能调度方案,包括接驳公交线路、车辆分配、发车时刻与发车类型。
[0116]
优选的,改进的双遗传算法的具体计算过程为:
[0117]
步骤431:设定接驳公交线路设计和车辆分配问题的种群规模为m,最大迭代次数n,交叉概率为pc,变异概率为pm,初始化计数器gene=0;接驳公交发车时刻和发车类型联合优化问题的种群规模为m1,最大迭代次数n1,交叉概率为p
c1
,变异概率为p
m1
,初始化计数器gene1=0;
[0118]
步骤432:用整数顺序编码方法对接驳公交线路设计和车辆分配问题、接驳公交发车时刻和发车类型联合优化问题进行染色体编码,用{0,1}二进制编码方法对车辆分配问题进行染色体编码;
[0119]
步骤433:如果gene小于n,则生成接驳公交线路设计和车辆分配问题的子代种群;否则,结束循环,输出接驳公交线路,以及每条接驳公交线路分配的公交车数量、发车时刻和发车类型;
[0120]
步骤434:如果gene1小于n1,则生成公交调度的子代种群;否则进入步骤437;
[0121]
步骤435:采用精英策略和轮盘赌方法执行选择操作;在交叉概率为p
c1
的控制下,采用两点交叉法执行交叉操作;在变异概率为p
m1
的控制下,采用基本位变异方法执行变异操作;对不满足约束的染色体进行修复;
[0122]
步骤436:根据公式(34)计算接驳公交发车时刻和发车类型联合优化问题的染色体适应度,并且,令gene1=gene1+1,返回步骤434;
[0123]
步骤437:根据公式(37)计算接驳公交线路设计和车辆分配问题的染色体适应度;
[0124]
步骤438:采用精英策略和轮盘赌方法执行选择操作;在交叉概率为pc的控制下,采用两点交叉法执行交叉操作;在变异概率为pm的控制下,采用基本位变异方法执行变异操作;对不满足约束的染色体进行修复;
[0125]
步骤439:令gene=gene+1,并返回所述步骤433。
[0126]
经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种人工与自动驾驶混行下的地铁接驳公交智能调度方法,包括选定研究区域,构建该区域的交通网络拓扑图;构建人工和自动驾驶公交车混行环境下接驳公交车辆运行约束条件;构建接驳公交智能调度模型;对上述模型设计优化算法并求解,得到智能调度方案,该方案包括接驳公交线路、车辆分配、发车时刻与发车类型。本发明充分考虑了模块化自动驾驶车灵活可编组这一特点,通过对接驳公交线路设计、车辆分配、发车时刻与发车类型进行联合优化,使其在地铁接驳中发挥更加重要的作用,实现了常规公交与地铁多种交通方式的优势互补,有效的降低了乘客的出行时间和公交公司运营成本,提高了接驳公交系统的服务水平。同时,本发明具有较高的普适性,不但适用于不同比例混行环境下的接驳公交联合优化,同样适用于完全人工驾驶和完全自动驾驶的环境下的接驳公交联合优化。
附图说明
[0127]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
[0128]
图1附图为本发明提供的实施例所示流程示意图;
[0129]
图2附图为本发明提供的人工与自动驾驶混行环境下地铁接驳公交智能调度示意图;
[0130]
图3附图为本发明提供的实施例所述的研究区域拓扑网络结构示意图。
具体实施方式
[0131]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他
实施例,都属于本发明保护的范围。
[0132]
本发明实施例公开了一种人工与自动驾驶混行下的地铁接驳公交智能调度方法,优化流程如图1所示,考虑了模块化自动驾驶车可以通过编组变成一个容量可变的自动驾驶公交车的特点,给定一定数量的公交车,对地铁站点服务范围内的多条接驳公交线路设计、车辆分配、发车时刻、发车类型进行动态的联合优化来减少公交公司的运营费用和提高服务质量(减少乘客的出行时间、提高出行的舒适度)。该方法具有较高的普适性,不但适用于不同比例混行环境下的接驳公交联合优化,同样适用于全人工驾驶和全自动驾驶的环境下的接驳公交联合优化。
[0133]
一种人工与自动驾驶混行下的地铁接驳公交智能调度方法,地铁接驳公交智能调度示意图如附图2所示,仿真网络由11个路段、9个需求点、9个公交站点以及1个地铁站点组成,如附图3所示,1-9标号圆点表示公交站点,标号10圆点表示地铁站点。接驳公交只能沿着网络中的路段行驶,该网络的车队包括4辆人工驾驶公交车和12辆模块化自动驾驶车。研究时长t0=20min,该网络的出行需求量是660人/每小时。
[0134]
设定所有的乘客均在需求点附近公交站点上车和在地铁站点下车,乘客上车时间为每位乘客2.5秒。多辆模块化自动驾驶公交车可连接在一起形成不同容量的自动驾驶公交车,假设最多可将5辆模块化自动驾驶公交车连接在一起,形成一个最大容量的自动驾驶公交车,而人工驾驶公交车只能单独运行。接驳公交线路上的车辆的发车间隔不均匀,公交车的最大发车间隔和最小发车间隔分别为8分钟和2分钟。人工驾驶公交车的固定运营成本为5.16美元,边际运营成本为0.37美元,自动驾驶公交车由于没有人工驾驶成本,可以节约63%的固定运营成本,其边际运营成本为0.37美元。组装模块化自动驾驶车的经济规模参数为0.8,乘客的等待时间的平均价值系数为ω1=0.3美元每分钟,乘客的车上时间平均时间价值系数为ω2=0.15美元每分钟,乘客的步行时间的平均时间价值系数为ω3=0.4美元每分钟,未被服务的乘客的惩罚费用为ω4=10美元。
[0135]
对于接驳公交线路设计和车辆分配问题,遗传算法的种群规模均设置为50,最大迭代次数为80次。对于接驳公交发车时刻和发车类型联合优化问题,遗传算法的种群规模均设置为50,最大迭代次数为30次。为了保证迭代的前期基因的多样性,防止过早收敛,变异率设为0.4。为了防止迭代后期破环精英策略,变异概率设为0.1。
[0136]
考虑以下两个场景:场景一是先对接驳公交线路设计和车辆分配问题进行优化,根据上述优化结果对接驳公交发车时刻和发车类型问题进行优化;场景二是对接驳公交线路设计、车辆分配、发车时刻和发车类型进行动态联合优化。仿真结果如表1所示。
[0137]
表1仿真结果
[0138][0139]
本发明考虑了模块化自动驾驶车可以通过编组变成一个容量可变的自动驾驶公
交车的特点,给定一定数量的公交车,对地铁站点服务范围内的多条接驳公交线路设计、车辆分配、发车时刻、发车类型进行动态的联合优化。与接驳公交线路设计和发车调度问题单独优化相比,乘客步行费用增加了1.99%,乘客等车费用降低了10.46%,乘客车上费用(车上时间和车上舒适度)降低了8.98%,车辆运行费用降低了11.58%,总体来说,本发明方法能够有效降低系统总成本6.35%。
[0140]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0141]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1