一种空间钢结构的日照阴影分布建模方法
1.本发明涉及土木工程结构技术领域,具体涉及一种空间钢结构的日照阴影分布建模方法。
背景技术:
2.空间钢结构因其具有承载能力强、装配化程度高、抗震性能好以及造型新颖等优点,多作为体育场馆、机场航站楼、铁路站房以及会展中心等大型公共建筑的上部屋盖结构。上部屋盖结构通常覆盖面积广、整体重量大且造型奇特,因此对钢屋盖高空施工合拢技术有较高的精度要求和安全要求。
3.钢材的导热系数约为混凝土的34倍,很容易随着外界的温度变化产生热胀冷缩效应,而空间钢结构多为高次超静定结构,冗余约束导致结构无法有效释放温度变形,致使结构产生温度次应力。特别是太阳辐射作用下,空间钢结构的温度场具有明显的非均匀性和时变性,其组成杆件会出现不同程度的轴向变形、弯曲变形以及截面不均匀变形,若无法准确计算空间钢结构的日照温度场,温度变形可能会影响到钢屋盖的高空施工精度和施工安全,给大型公共建筑的施工和运营埋下安全隐患。因此,有必要对太阳辐射作用下的空间钢结构日照温度场进行准确计算。
4.目前主要采用现场试验验证和数值模拟相结合的方法来获取空间钢结构的日照温度场分布规律。在空间钢结构日照温度场数值模拟中会涉及到有限元模型建立、杆件间的日照阴影判断以及边界约束施加等内容。其中,有限元模型通常采用板壳单元或实体单元和覆盖在其表面的效应单元共同建立(板壳单元或实体单元模拟热传导,表面效应单元用来施加太阳辐射热流),以便有效模拟杆件的温度变形,以防空间钢结构局部失稳破坏;边界约束包括太阳短波辐射、空气对流换热、空气与周围环境的长波辐射;而日照阴影无法在有限元软件中直接计算,更没有一种现成的方法去计算。可以看出,空间钢结构的日照温度场数值模拟是一个复杂的多学科交叉的计算过程,计算精度受多种因素的制约,而日照阴影判断又是其中最难解决的关键制约因素。
5.现有的日照阴影计算方法主要有两种,一种是基于计算机图形学的包围盒检测,另一种是基于特定结构形状编制的几何阴影判定算法。第一种日照阴影计算方法针对的是以杆单元建立的有限元模型,未考虑太阳辐射作用下钢杆件的弯曲变形和截面不均匀变形,无法合理的表征杆件的实际工作状态,未考虑空间钢结构局部屈曲失稳的风险。且每个荷载步下都需要对单元的坐标进行多次转换,计算工程量大,不适合钢屋盖等大型空间钢结构的日照阴影计算;第二种日照阴影计算方法针对特定的结构,无法解决不同时刻下空间钢结构中大量交错杆件的日照阴影判别的问题。
6.因此,有必要基于有限元软件和编程软件建立一种准确计算空间钢结构日照阴影分布规律的联合仿真方法,解决空间钢结构日照温度场数值模拟中日照阴影判别难的问题。
技术实现要素:
7.本发明的目的在于提供一种空间钢结构的日照阴影分布建模方法,以解决空间钢结构日照温度场数值模拟中不同太阳位置下日照阴影分布规律计算困难的问题,提高了日照阴影计算的应用范围。
8.本发明解决上述技术问题的技术方案如下:
9.本发明提供一种空间钢结构的日照阴影分布建模方法,所述空间钢结构的日照阴影分布建模方法包括:
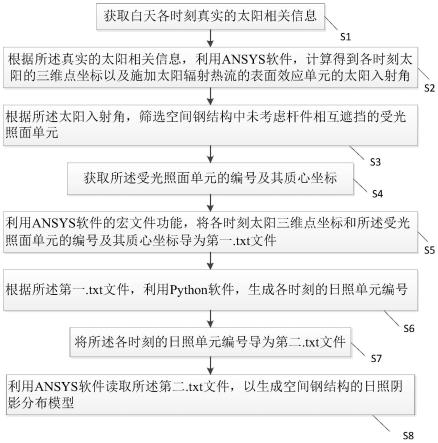
10.s1:获取白天各时刻真实的太阳相关信息;
11.s2:根据所述真实的太阳相关信息,利用ansys软件,计算得到各时刻太阳的三维点坐标以及施加太阳辐射热流的表面效应单元的太阳入射角;
12.s3:根据所述太阳入射角,筛选空间钢结构中未考虑杆件相互遮挡的受光照面单元;
13.s4:获取所述受光照面单元的编号及其质心坐标;
14.s5:利用ansys软件的宏文件功能,将各时刻太阳三维点坐标和所述受光照面单元的编号及其质心坐标导为第一.txt文件;
15.s6:根据所述第一.txt文件,利用python软件,生成各时刻的日照单元编号;
16.s7:将所述各时刻的日照单元编号导为第二.txt文件;
17.s8:利用ansys软件读取所述第二.txt文件,以生成空间钢结构的日照阴影分布模型。
18.可选择地,所述步骤s1中,所述真实的太阳相关信息包括真实的太阳高度角和真实的太阳方位角。
19.可选择地,所述步骤s2中,所述太阳入射角为:
[0020][0021]
其中,cos_e(enum,x)为编号为enum的面单元法线与x轴夹角的余弦;cos_s(stime,x)为时间为stime时的太阳入射光线与x轴的夹角的余弦;cos_e(enum,y)为编号为enum的面单元法线与y轴夹角的余弦;cos_s(stime,y)为时间为stime时的太阳入射光线与y轴的夹角的余弦;cos_e(enum,z)为编号为enum的面单元法线与z轴夹角的余弦;cos_s(stime,z)为时间为stime时的太阳入射光线与z轴的夹角的余弦。
[0022]
可选择地,所述步骤s3包括:利用太阳入射角的余弦大于零,筛选空间钢结构中未考虑杆件相互遮挡的受光照面单元。
[0023]
可选择地,所述步骤s6包括:
[0024]
s61:根据所述第一.txt文件中各时刻太阳三维点坐标,利用python软件,计算各时刻太阳三维点坐标过原点的太阳入射光线方向向量;
[0025]
s62:利用点法式方程确定各时刻过原点且与所述太阳入射光线方向向量垂直的平面方程并利用点向式方程确定各时刻的太阳入射光线方向向量过各单元质心坐标的直线方程;
[0026]
s63:分别确定与各时刻的直线方程和平面方程的交点,交点编号与其对应的单元编号一致;
[0027]
s64:在目标时刻的交点集合中选取一个交点作为主交点,其余交点为潜在次交点,其中,主交点编号对应的质心坐标z值和次交点编号对应的质心坐标z值之差的绝对值应大于一个限值,该限值与空间钢结构的造型以及组成杆件的截面形状有关;
[0028]
s65:计算所述主交点和所述各次交点之间的间距;
[0029]
需要说明的是,这里的间距实际上是间距集合,这个集合中若间距全大于控制值,日照单元就是主交点;若存在间距小于控制值的情况,可能是很多间距都小于控制值,则提取计算这些间距的主交点与各次交点中z值最大的交点编号对应的为日照单元。
[0030]
s66:判断所述交点间距是否大于控制值,若是,确定所述主交点编号对应的单元为日照单元,否则,确定满足交点间距小于控制值的所述主交点编号和所述各次交点编号对应的单元中质心坐标z值最大的单元为日照单元;
[0031]
s67:重复步骤s64-s66,直到获得所述目标时刻的交点集合中的最后一个交点作为主交点时的日照单元编号,并剔除整个目标时刻中重复的日照单元编号后进入步骤s68;
[0032]
s68:将下一时刻作为目标时刻并返回步骤s64,直到遍历所有时刻,得到所述各时刻的日照单元。
[0033]
可选择地,所述步骤s62中,所述点法式方程为:
[0034]
s1×
(x-x
p
)+s2×
(y-y
p
)+s3×
(z-z
p
)=0
[0035]
所述点向式方程为:
[0036][0037]
其中,s(s1,s2,s3)为指向原点的太阳光线向量;p(x
p
,y
p
,z
p
)为平面上的一点;l(x
l
,y
l
,z
l
)为直线上的一点。
[0038]
可选择地,所述步骤s65中,所述间距通过以下方式计算:
[0039][0040]
其中,δl为空间两点间的距离;k为交点间距控制值;(xa,ya,za)与(xb,yb,zb)分别为空间a点与b点的坐标。
[0041]
本发明具有以下有益效果:
[0042]
(1)本发明可准确计算以板壳单元或实体单元建立的空间钢结构有限元模型的日照阴影分布,甚至可以计算桥梁的日照阴影分布,适用对象广泛;
[0043]
(2)本发明通过常见的.txt文件实现了有限元软件与编程软件在日照阴影计算中的联合仿真,避免了有限元软件与编程软件接口难关联、难调用、易出错等问题,也可用不同的有限元软件和编程实现结构的日照阴影准确计算;
[0044]
(3)本发明适用于复杂结构的日照阴影计算,日照阴影计算精度可根据不同的结构、杆件截面尺寸、单元尺寸进行调整,适用性强,计算精度高;
[0045]
(4)本发明已在ansys软件中将杆件自身遮蔽的单元去除,仅在python中计算杆件间相互遮挡的阴影单元,对于大型有限元模型来说,可节约大量的计算时间;
[0046]
(5)本发明中的日照阴影判定算法基于计算机图形学的基础理论知识,算法逻辑清晰明了,对于不同人员都有较好的上手性,在日照温度场数值模拟、日照阴影可视化技术
等实际应用中有较好的使用前景。
附图说明
[0047]
图1为本发明空间钢结构的日照阴影分布建模方法的流程图。
具体实施方式
[0048]
以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
[0049]
本发明提供一种空间钢结构的日照阴影分布建模方法,参考图1所示,所述空间钢结构的日照阴影分布建模方法包括:
[0050]
s1:获取白天各时刻真实的太阳相关信息;
[0051]
本发明白天各时刻真实的太阳相关信息是通过现场实测或通过理论计算公式得到的,所述真实的太阳相关信息包括真实的太阳高度角和真实的太阳方位角。
[0052]
s2:根据所述真实的太阳相关信息,利用ansys软件,计算得到各时刻太阳的三维点坐标以及施加太阳辐射热流的表面效应单元的太阳入射角;
[0053]
这里,利用了空间解析几何的知识,即:
[0054][0055][0056]
cosθ=cos_e(enum,x)
×
cos_s(stime,x)+cos_e(enum,y)
×
cos_s(stime,y)
[0057]
+cos_e(enum,z)
×
cos_s(stime,z)
[0058]
式中,hs为太阳高度角;γs为太阳方位角;为地理纬度;δ为太阳赤纬角;ω为太阳时角;cos_e(enum,x)为编号为enum的面单元法线与x轴夹角的余弦;cos_s(stime,x)为时间为stime时的太阳入射光线与x轴的夹角的余弦;cos_e(enum,y)为编号为enum的面单元法线与y轴夹角的余弦;cos_s(stime,y)为时间为stime时的太阳入射光线与y轴的夹角的余弦;cos_e(enum,z)为编号为enum的面单元法线与z轴夹角的余弦;cos_s(stime,z)为时间为stime时的太阳入射光线与z轴的夹角的余弦。
[0059]
由此,所述太阳入射角为:
[0060][0061]
s3:根据所述太阳入射角,筛选空间钢结构中未考虑杆件相互遮挡的受光照面单元;
[0062]
本发明利用太阳入射角的余弦大于零,筛选空间钢结构中未考虑杆件相互遮挡的受光照面单元。这样,能够在后续日照阴影判定中节约大量的计算时间。
[0063]
s4:获取所述受光照面单元的编号及其质心坐标;
[0064]
s5:利用ansys软件的宏文件功能,将各时刻太阳三维点坐标和所述受光照面单元的编号及其质心坐标导为第一.txt文件;
[0065]
s6:根据所述第一.txt文件,利用python软件,生成各时刻的日照单元编号;
[0066]
可选择地,所述步骤s6包括:
[0067]
s61:根据所述第一.txt文件中各时刻太阳三维点坐标,利用python软件,计算各时刻太阳三维点坐标过原点的太阳入射光线方向向量;
[0068]
s62:利用点法式方程确定各时刻过原点且与所述太阳入射光线方向向量垂直的平面方程并利用点向式方程确定各时刻的太阳入射光线方向向量过各单元质心坐标的直线方程;
[0069]
所述点法式方程为:
[0070][0071]
所述点向式方程为:
[0072][0073]
其中,s(s1,s2,s3)为指向原点的太阳光线向量;p(x
p
,y
p
,z
p
)为平面上的一点,本发明中为原点;l(x
l
,y
l
,z
l
)为直线上的一点,本发明中为单元质心坐标。
[0074]
s63:分别确定与各时刻的直线方程和平面方程的交点,交点编号与其对应的单元编号一致;
[0075]
需要说明的是,交点坐标首先通过联立点法式方程和点向式方程求出t,再将t代入至点向式方程中即可求出。
[0076]
s64:在目标时刻的交点集合中选取一个交点作为主交点,其余交点为潜在次交点,其中,主交点编号对应的质心坐标z值和次交点编号对应的质心坐标z值之差的绝对值应大于一个限值,该限值与空间钢结构的造型以及组成杆件的截面形状有关;
[0077]
即:|z
主-z
次
|≥m,其中,m为限值。
[0078]
s65:计算所述主交点和所述各次交点之间的间距;
[0079]
所述间距通过以下方式计算:
[0080][0081]
其中,δl为空间两点间的距离;k为交点间距控制值;(xa,ya,za)与(xb,yb,zb)分别为空间a点与b点的坐标。
[0082]
s66:判断所述交点间距是否大于控制值,若是,确定所述主交点编号对应的单元为日照单元,否则,确定满足交点间距小于控制值的所述主交点编号和所述各次交点编号对应的单元中质心坐标z值最大的单元为日照单元;
[0083]
s67:重复步骤s64-s66,直到获得所述目标时刻的交点集合中的最后一个交点作为主交点时的日照单元编号,并剔除整个目标时刻中重复的日照单元编号后进入步骤s68;
[0084]
s68:将下一时刻作为目标时刻并返回步骤s64,直到遍历所有时刻,得到所述各时刻的日照单元。
[0085]
s7:将所述各时刻的日照单元编号导为第二.txt文件;
[0086]
这里,需要说明的是,整个python程序中需要利用import语句导入math、os.path、time以及datetime模块,建立几个函数即可轻松完成各时刻的日照单元或杆件相互遮蔽的阴影单元编号的计算,达到空间钢结构日照阴影实时计算的目的。
[0087]
s8:利用ansys软件读取所述第二.txt文件,以生成空间钢结构的日照阴影分布模型。
[0088]
即再次利用ansys软件的宏文件功能将python软件计算出的日照单元编号或杆件相互遮蔽的阴影单元编号读入ansys软件数组中,作为空间钢结构日照温度场数值模拟中日照阴影判定的结果。
[0089]
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1