车位识别方法、系统、装置、电子设备及可读存储介质与流程
本技术涉及计算机视觉领域,特别涉及一种车位识别方法,还涉及一种车位识别系统、装置、电子设备以及计算机可读存储介质。
背景技术:
1、随着科技的快速发展,关于车辆的自动泊车技术日益成熟,在自动泊车系统中,停车位识别是其中的关键步骤。当前自动泊车技术中,泊车功能丰富多样,各家方案各不相同,但是,大部分都存在由于车位识别不准确导致的车位中最终泊入车辆姿态偏向于某一个方向的问题。
2、因此,如何有效提高车位识别结果的准确性,进而保证车辆以更为准确的姿态泊入车位中本领域技术人员亟待解决的问题。
技术实现思路
1、本技术的目的是提供一种车位识别方法,该车位识别方法可以有效提高车位识别结果的准确性,进而保证车辆以更为准确的姿态泊入车位中;本技术的另一目的是提供一种车位识别装置、系统、电子设备及计算机可读存储介质,均具有上述有益效果。
2、第一方面,本技术提供了一种车位识别方法,包括:
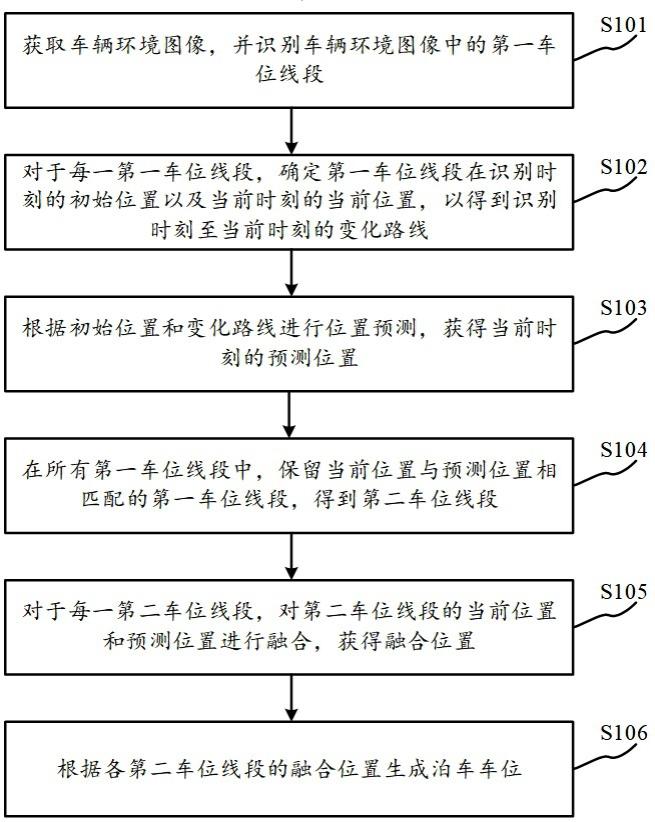
3、获取车辆环境图像,并识别所述车辆环境图像中的第一车位线段;
4、对于每一所述第一车位线段,确定所述第一车位线段在识别时刻的初始位置以及当前时刻的当前位置,以得到所述识别时刻至所述当前时刻的变化路线;
5、根据所述初始位置和所述变化路线进行位置预测,获得所述当前时刻的预测位置;
6、在所有所述第一车位线段中,保留所述当前位置与所述预测位置相匹配的第一车位线段,得到第二车位线段;
7、对于每一所述第二车位线段,对所述第二车位线段的所述当前位置和所述预测位置进行融合,获得融合位置;
8、根据各所述第二车位线段的融合位置生成泊车车位。
9、可选地,所述对于每一所述第二车位线段,对所述第二车位线段的所述当前位置和所述预测位置进行融合,获得融合位置,包括:
10、确定所述第二车位线段分别在所述当前位置的第一线段参数和在所述预测位置的第二线段参数;所述线段参数包括所述第二车位线段与车辆后轴中线坐标系之间的角度、所述第二车位线段与车辆后轴中心点之间的距离、所述第二车位线段的线段长度;
11、按照预设权重对所述第一线段参数和所述第二线段参数进行平滑处理,获得融合线段参数;
12、根据所述融合线段参数确定所述第二车位线段的融合位置。
13、可选地,所述在所有所述第一车位线段中,保留所述当前位置与所述预测位置相匹配的第一车位线段,得到第二车位线段之前,还包括:
14、获取所述第一车位线段的匹配通过次数;
15、判断所述匹配通过次数是否达到预设次数;
16、若是,则执行在所有所述第一车位线段中,保留所述当前位置与所述预测位置相匹配的第一车位线段,得到第二车位线段。
17、可选地,所述对于每一所述第一车位线段,确定所述第一车位线段在识别时刻的初始位置,在当前时刻的当前位置,所述识别时刻至所述当前时刻的变化路线之前,还包括:
18、按照预设筛选指标对所有所述第一车位线段进行筛选,得到筛选后的第一车位线段;其中,所述预设筛选指标包括线段长度、线段清晰度、线段间距离、感兴趣区域中的一种或多种。
19、可选地,所述对于每一所述第二车位线段,对所述第二车位线段的所述当前位置和所述预测位置进行融合,获得融合位置之后,还包括:
20、按照预设调整规则对所有所述第二车位线段进行调整,得到调整后的第二车位线段;其中,所述预设调整规则包括线段删除、线段合并、线段延伸中的一种或多种。
21、可选地,所述根据各所述第二车位线段的融合位置生成泊车车位之后,还包括:
22、对各所述泊车车位进行障碍物识别,获得不存在所述障碍物的可泊车车位;其中,所述障碍物识别包括关于所述障碍物的超声识别和/或视觉识别;
23、输出各所述可泊车车位。
24、可选地,所述输出各所述可泊车车位之后,还包括:
25、根据选择指令确定目标可泊车车位;
26、根据车辆当前位姿和所述目标可泊车车位确定泊车路线;
27、控制车辆按照所述泊车路线驶入所述目标可泊车车位。
28、可选地,所述控制车辆按照所述泊车路线驶入所述目标可泊车车位,包括:
29、实时获取所述目标可泊车车位与所述车辆的距离信息;
30、根据所述距离信息对所述目标可泊车车位进行修正,获得实时修正车位;
31、实时获取所述车辆行驶过程中关于路径障碍物的超声感知信号;
32、根据所述实时修正车位和所述超声感知信号对所述泊车路线进行修正,获得实时修正路线;
33、控制所述车辆按照所述实时修正路线驶入所述实时修正车位。
34、第二方面,本技术还公开了一种车位识别系统,包括:
35、摄像设备,用于获取车辆环境图像;
36、控制器,用于根据所述车辆环境图像执行如上所述的任一种车位识别方法的步骤。
37、可选地,所述摄像设备为超鱼眼镜头,安装于车头、车尾以及左右倒镜位置。
38、可选地,所述车位识别系统还包括:
39、超声波探头,用于采集关于障碍物的超声探测信号;
40、所述超声波探头安装于车头、车尾以及车辆左右两侧位置。
41、第三方面,本技术还公开了一种车位识别装置,包括:
42、识别模块,用于获取车辆环境图像,并识别所述车辆环境图像中的第一车位线段;
43、确定模块,用于对于每一所述第一车位线段,确定所述第一车位线段在识别时刻的初始位置以及当前时刻的当前位置,以得到所述识别时刻至所述当前时刻的变化路线;
44、预测模块,用于根据所述初始位置和所述变化路线进行位置预测,获得所述当前时刻的预测位置;
45、保留模块,用于在所有所述第一车位线段中,保留所述当前位置与所述预测位置相匹配的第一车位线段,得到第二车位线段;
46、融合模块,用于对于每一所述第二车位线段,对所述第二车位线段的所述当前位置和所述预测位置进行融合,获得融合位置;
47、生成模块,用于根据各所述第二车位线段的融合位置生成泊车车位。
48、第四方面,本技术还公开了一种电子设备,包括:
49、存储器,用于存储计算机程序;
50、处理器,用于执行所述计算机程序时实现如上所述的任一种车位识别方法的步骤。
51、第五方面,本技术还公开了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的任一种车位识别方法的步骤。
52、本技术提供了一种车位识别方法,包括:获取车辆环境图像,并识别所述车辆环境图像中的第一车位线段;对于每一所述第一车位线段,确定所述第一车位线段在识别时刻的初始位置以及当前时刻的当前位置,以得到所述识别时刻至所述当前时刻的变化路线;根据所述初始位置和所述变化路线进行位置预测,获得所述当前时刻的预测位置;在所有所述第一车位线段中,保留所述当前位置与所述预测位置相匹配的第一车位线段,得到第二车位线段;对于每一所述第二车位线段,对所述第二车位线段的所述当前位置和所述预测位置进行融合,获得融合位置;根据各所述第二车位线段的融合位置生成泊车车位。
53、应用本技术所提供的技术方案,在利用车辆环境图像识别获得其中的车位线段之后,基于该车位线段的初始位置、当前位置、变化路线等信息进行位置预测,得到预测位置,然后通过当前位置与预测位置的匹配结果来确定车位线段识别的准确性,从而仅保留匹配通过的车位线段,进一步,对于保留下来的车位线段,再通过预测位置与当前位置的融合来得到更为准确的车位线段,并生成泊车车位,显然,利用基于筛选整合得到的车位线段实现泊车车位的自动化生成,可以有效保证该车位识别结果的准确性,进而可以保证车辆以更为准确的姿态泊入车位中。
54、本技术所提供的车位识别装置、系统、电子设备以及计算机可读存储介质,同样具有上述技术效果,本技术在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!