基于独立否决和联合否决的无人机运用监测方法及系统
本发明涉及无人机效能监测领域,特别是涉及一种基于独立否决和联合否决的无人机运用监测方法及系统。
背景技术:
1、目前的技术:获取飞行评估信息,通过预测评估模型处理所述飞行评估信息,获得飞行前评估结果,若所述航中评估结果中的飞行风险值高于预设风险阈值,则调整所述小型无人机的飞行控制指令直至所述航中评估结果为评估通过或飞行结束。通过预设评估模型处理飞行评估信息,快速客观准确的获取飞行任务评估结果,从而根据飞行任务评估结果实现对小型无人机进行精细化控制。其基本设计步骤如图1所示。
2、当前方法只关注了无人机任务执行前的综合效能评估,但随着无人机的续航能力的不断提升,任务执行时间延长,无人机任务执行中遇到危险的概率成基数增加,通过飞行前的效能预测,能够有效提高任务执行完成率,但在无人机飞行过程中,各种不能预知的突发干扰情况,例如突发的强风、沙尘、装备自身性能变化等,对无人机实时的飞行过程同样有较大影响,对无人机的飞行带来了巨大的挑战,急需构建相应方法,补齐短板,提高综合任务执行成功率。
技术实现思路
1、本发明的目的是提供一种基于独立否决和联合否决的无人机运用监测方法及系统,能够提高无人机综合任务执行成功率。
2、为实现上述目的,本发明提供了如下方案:
3、一种基于独立否决和联合否决的无人机运用监测方法,所述方法包括:
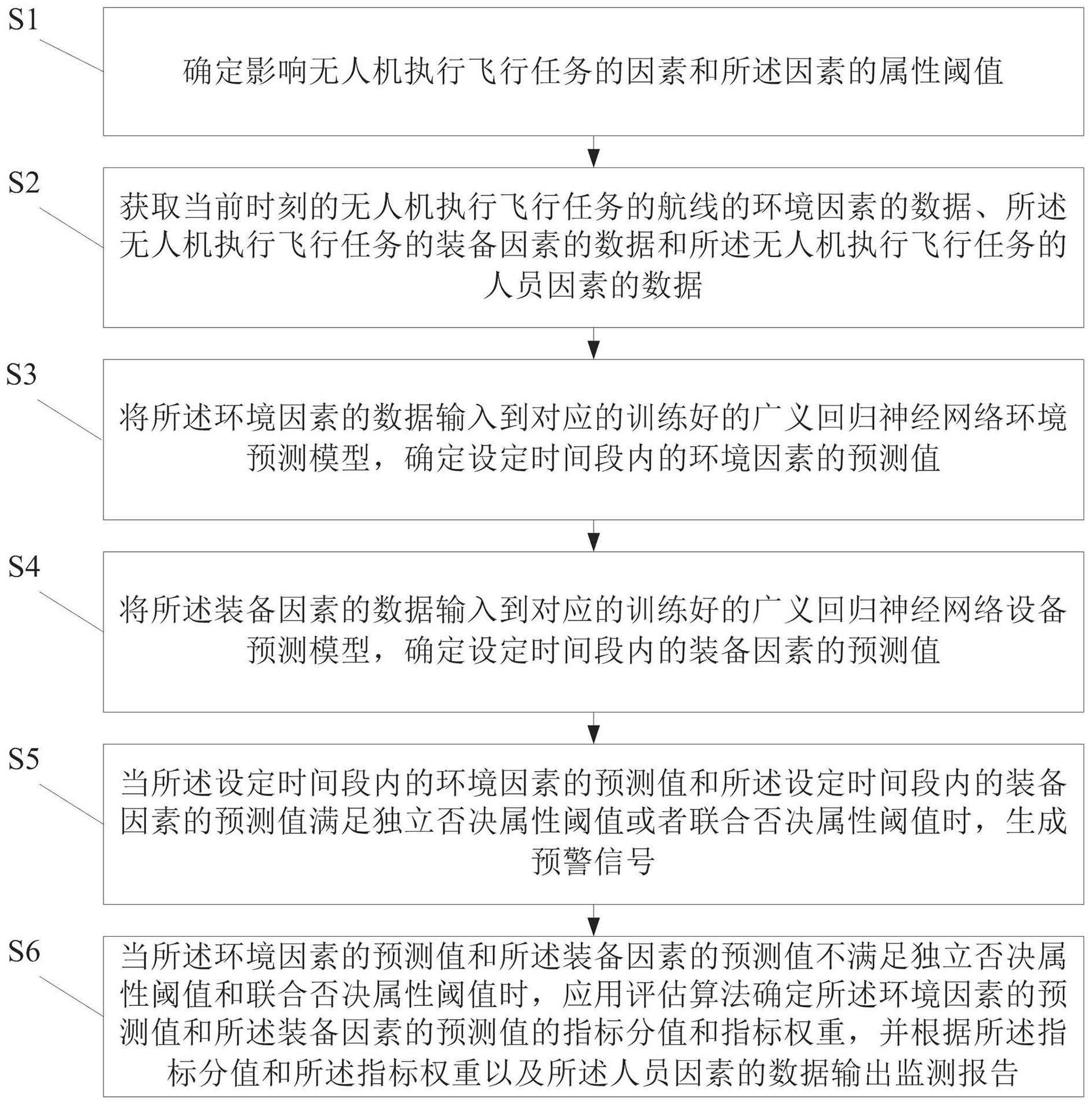
4、确定影响无人机执行飞行任务的因素和所述因素的属性阈值;所述影响无人机执行飞行任务的因素包括环境因素、装备因素和人员因素;所述属性阈值为独立否决属性阈值、联合否决属性阈值或者通过属性阈值;
5、获取当前时刻的无人机执行飞行任务的航线的环境因素的数据、所述无人机执行飞行任务的装备因素的数据和所述无人机执行飞行任务的人员因素的数据;
6、将所述环境因素的数据输入到对应的训练好的广义回归神经网络环境预测模型,确定设定时间段内的环境因素的预测值;
7、将所述装备因素的数据输入到对应的训练好的广义回归神经网络设备预测模型,确定设定时间段内的装备因素的预测值;
8、当所述设定时间段内的环境因素的预测值和所述设定时间段内的装备因素的预测值满足独立否决属性阈值或者联合否决属性阈值时,生成预警信号;所述预警信号包括预警结果、预警的因素和改进措施;
9、当所述环境因素的预测值和所述装备因素的预测值不满足独立否决属性阈值和联合否决属性阈值时,应用评估算法确定所述环境因素的预测值和所述装备因素的预测值的指标分值和指标权重,并根据所述指标分值和所述指标权重以及所述人员因素的数据输出监测报告;所述监测报告包括装备评分、飞行状态、装备性能和飞行人员素质。
10、可选地,所述确定影响无人机执行飞行任务的因素和所述因素的属性阈值,具体包括:
11、根据无人机执行的飞行任务,确定所述影响无人机执行飞行任务的因素的独立否决属性阈值和联合否决属性阈值;当所述影响无人机执行飞行任务的因素中的单一因素满足独立否决属性阈值时,无人机无法执行当前的飞行任务;当所述影响无人机执行飞行任务的因素中的多个因素同时满足联合否决属性阈值时,无人机无法执行当前的飞行任务;
12、根据无人机执行的飞行任务,确定所述影响无人机执行飞行任务的因素的通过属性阈值;当所述影响无人机执行飞行任务的因素满足通过属性阈值时,无人机能够执行当前的飞行任务。
13、可选地,所述广义回归神经网络环境预测模型和广义回归神经网络设备预测模型的训练过程具体包括:
14、获取无人机执行飞行任务的航线的环境因素的历史数据和所述无人机执行飞行任务的装备因素的历史数据,以及无人机执行飞行任务的航线的环境因素的所述设定时间段后的历史数据和所述无人机执行飞行任务的装备因素的所述设定时间段后的历史数据;
15、以所述无人机执行飞行任务的航线的环境因素的历史数据为输入,以所述无人机执行飞行任务的航线的环境因素的所述设定时间段后的历史数据为输出,对对应的广义回归神经网络环境预测模型进行训练,得到初始训练好的广义回归神经网络环境预测模型;
16、以所述无人机执行飞行任务的装备因素的历史数据为输入,以所述无人机执行飞行任务的装备因素的所述设定时间段后的历史数据为输出,对对应的广义回归神经网络设备预测模型进行训练,得到初始训练好的广义回归神经网络设备预测模型;
17、应用果蝇优化算法,分别对所述初始训练好的广义回归神经网络环境预测模型和所述初始训练好的广义回归神经网络设备预测模型进行优化,得到训练好的广义回归神经网络环境预测模型和训练好的广义回归神经网络设备预测模型。
18、可选地,所述评估算法为层次分析法。
19、可选地,所述环境因素包括天候环境、电磁环境、地理环境和障碍物环境;所述装备因素包括装备基本性能、装备适应性分析和装备人员操作性分析;所述人员因素包括基本能力分析、飞行经验分析和培训情况分析。
20、一种基于独立否决和联合否决的无人机运用监测系统,应用于上述的基于独立否决和联合否决的无人机运用监测方法,所述系统包括:
21、因素和属性阈值确定模块,用于确定影响无人机执行飞行任务的因素和所述因素的属性阈值;所述影响无人机执行飞行任务的因素包括环境因素、装备因素和人员因素;所述属性阈值为独立否决属性阈值、联合否决属性阈值或者通过属性阈值;
22、获取模块,用于获取当前时刻的无人机执行飞行任务的航线的环境因素的数据、所述无人机执行飞行任务的装备因素的数据和所述无人机执行飞行任务的人员因素的数据;
23、环境预测值确定模块,用于将所述环境因素的数据输入到对应的训练好的广义回归神经网络环境预测模型,确定设定时间段内的环境因素的预测值;
24、装备预测值确定模块,用于将所述装备因素的数据输入到对应的训练好的广义回归神经网络设备预测模型,确定设定时间段内的装备因素的预测值;
25、预警信号生成模块,用于当所述环境因素的预测值和所述装备因素的预测值满足独立否决属性阈值或者联合否决属性阈值时,生成预警信号;所述预警信号包括预警结果、预警的因素和改进措施;
26、监测报告确定模块,用于当所述环境因素的预测值和所述装备因素的预测值不满足独立否决属性阈值和联合否决属性阈值时,应用评估算法确定所述环境因素的预测值和所述装备因素的预测值的指标分值和指标权重,并根据所述指标分值和所述指标权重以及所述人员因素的数据输出监测报告;所述监测报告包括装备评分、飞行状态、装备性能和飞行人员素质。
27、一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行上述的基于独立否决和联合否决的无人机运用监测方法。
28、一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现上述的基于独立否决和联合否决的无人机运用监测方法。
29、根据本发明提供的具体实施例,本发明公开了以下技术效果:
30、本发明提供的一种基于独立否决和联合否决的无人机运用监测方法,包括:确定影响无人机执行飞行任务的因素和因素的属性阈值;影响无人机执行飞行任务的因素包括环境因素、装备因素和人员因素;属性阈值为独立否决属性阈值、联合否决属性阈值或者通过属性阈值;获取当前时刻的无人机执行飞行任务的航线的环境因素的数据、无人机执行飞行任务的装备因素的数据和无人机执行飞行任务的人员因素的数据;将环境因素的数据输入到对应的训练好的广义回归神经网络环境预测模型,确定设定时间段内的环境因素的预测值;将装备因素的数据输入到对应的训练好的广义回归神经网络设备预测模型,确定设定时间段内的装备因素的预测值;当设定时间段内的环境因素的预测值和设定时间段内的装备因素的预测值满足独立否决属性阈值或者联合否决属性阈值时,生成预警信号;预警信号包括预警结果、预警的因素和改进措施;当环境因素的预测值和装备因素的预测值不满足独立否决属性阈值和联合否决属性阈值时,应用评估算法确定环境因素的预测值和装备因素的预测值的指标分值和指标权重,并根据指标分值和指标权重以及人员因素的数据输出监测报告;监测报告包括装备评分、飞行状态、装备性能和飞行人员素质。本发明对任务执行中无人机飞行的相关数据进行监测并提供可控时间内的预测输出,为操作手留足应急方案时间,对于无人机任务执行将起到全阶段的有力保障。同时,加入独立否决和联合否决的方法,结合专家经验,将复杂指标体系中有独立否决和联合否决的指标项进行剔除,降低预测算法的计算维度,提高预测算法的实时输出效率。
- 还没有人留言评论。精彩留言会获得点赞!