斑马线框生成方法、装置、电子设备及存储介质与流程
本申请涉及数据处理,尤其涉及一种斑马线框生成方法、装置、电子设备及存介质。
背景技术:
1、斑马线是高精地图中的重要组成元素之一,斑马线通常是由数据结点连接而成的多边形,是车行道上规定行人横穿车道的步行范围。
2、相关技术中,在高精地图生成斑马线时,先确定并排车道线的位置,再根据并排车道线的位置生成一个四边形,在四边形生成斑马线框。由于车道线长短不一,且车道线存在交叉,无法确定并排车道线的准确位置,导致无法在高精地图准确地生成斑马线框,因此,亟需一种新的斑马线框生成方法。
技术实现思路
1、为解决或部分解决相关技术中存在的问题,本申请提供一种斑马线框生成方法、装置、电子设备及存介质,能够确定并排车道线的准确位置,且根据并排车道线确定斑马线的斑马线框,提高斑马线框的生成精度,在高精地图准确地生成斑马线框。
2、本申请第一方面提供一种斑马线框生成方法,包括:
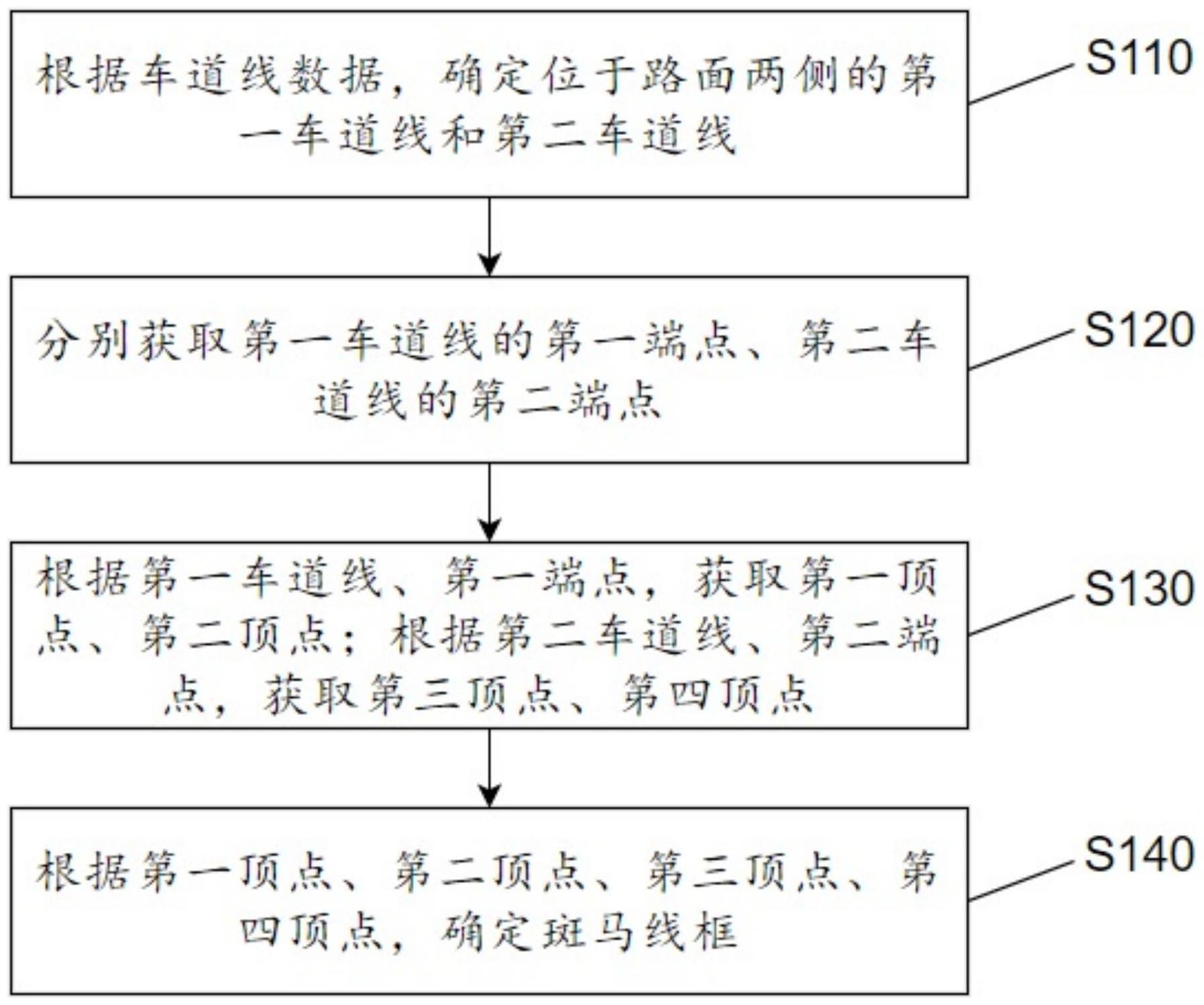
3、根据车道线数据,确定位于路面两侧的第一车道线和第二车道线;
4、分别获取所述第一车道线的第一端点、所述第二车道线的第二端点;
5、根据所述第一车道线、所述第一端点,获取第一顶点、第二顶点;
6、根据所述第二车道线、所述第二端点,获取第三顶点、第四顶点;
7、根据所述第一顶点、所述第二顶点、所述第三顶点、所述第四顶点,确定斑马线框。
8、在其中一个实施例中,所述根据车道线数据,确定位于路面两侧的第一车道线和第二车道线,包括:
9、根据车道线数据,生成每条车道线的左缓冲区和右缓冲区;
10、根据每条车道线在其相邻车道线的左缓冲区和右缓冲区分别占据的面积大小,获取每条车道线的位置关系;
11、根据所述每条车道线的位置关系,确定位于路面两侧的第一车道线和第二车道线。
12、在其中一个实施例中,所述根据每条车道线在其相邻车道线的左缓冲区和右缓冲区分别占据的面积大小,获取每条车道线的位置关系,包括:
13、当车道线在其相邻车道线的左缓冲区占据的面积大于在右缓冲区占据的面积,判断出该车道线在其相邻车道线的左侧;或/和,
14、当车道线在其相邻车道线的右缓冲区占据的面积大于在左缓冲区占据的面积,判断出该车道线在其相邻车道线的右侧。
15、在其中一个实施例中,所述分别获取所述第一车道线的第一端点、所述第二车道线的第二端点,包括:
16、将所述第一车道线的终点确定为所述第一端点;
17、将所述第二车道线的终点确定为所述第二端点。
18、在其中一个实施例中,所述根据所述第一车道线、所述第一端点,获取第一顶点、第二顶点,包括:
19、根据所述第一车道线、所述第一端点,生成与所述第一端点距离第一设定距离的、在所述第一车道线延长线上的第一顶点,生成与所述第一端点距离第二设定距离的、在所述第一车道线延长线上的第二顶点;
20、所述根据所述第二车道线、所述第二端点,获取第三顶点、第四顶点,包括:
21、根据所述第二车道线、所述第二端点,生成与所述第二端点距离第一设定距离的、在所述第二车道线延长线上的第三顶点,生成与所述第二端点距离第二设定距离的、在所述第二车道线延长线上的第四顶点。
22、在其中一个实施例中,所述根据车道线数据,生成每条车道线的左缓冲区和右缓冲区,包括:
23、根据车道线数据,通过计算机视觉技术对车道线进行处理,生成每条车道线的左缓冲区和右缓冲区。
24、本申请第二方面提供一种斑马线框生成装置,包括:车道线获取模块,用于根据车道线数据,确定位于路面两侧的第一车道线和第二车道线;
25、端点获取模块,用于分别获取所述第一车道线的第一端点、所述第二车道线的第二端点;
26、第一处理模块,用于根据所述第一车道线、所述第一端点,获取第一顶点、第二顶点;
27、第二处理模块,用于根据所述第二车道线、所述第二端点,获取第三顶点、第四顶点
28、绘制模块,用于根据所述第一顶点、所述第二顶点、所述第三顶点、所述第四顶点,确定斑马线框。
29、在其中一个实施例中,所述车道线获取模块,还用于根据车道线数据,生成每条车道线的左缓冲区和右缓冲区;根据每条车道线在其相邻车道线的左缓冲区和右缓冲区分别占据的面积大小,获取每条车道线的位置关系;根据所述每条车道线的位置关系,确定位于路面两侧的第一车道线和第二车道线。
30、本申请第三方面提供一种电子设备,包括:
31、处理器;以及
32、存储器,其上存储有可执行代码,当所述可执行代码被所述处理器执行时,使所述处理器执行如上所述的方法。
33、本申请第四方面提供一种计算机可读存储介质,其上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如上所述的方法。
34、本申请提供的技术方案可以包括以下有益效果:
35、本申请实施例的斑马线框生成方法,通过根据车道线数据,确定位于路面两侧的第一车道线和第二车道线;分别获取第一车道线的第一端点、第二车道线的第二端点;根据第一车道线、第一端点,获取第一顶点、第二顶点;根据第二车道线、第二端点,获取第三顶点、第四顶点;根据第一顶点、第二顶点、第三顶点、第四顶点,确定斑马线框,能够确定并排车道线的准确位置,且根据并排车道线确定斑马线的斑马线框,提高斑马线框的生成精度,在高精地图准确地生成斑马线框。
36、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种斑马线框生成方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据车道线数据,确定位于路面两侧的第一车道线和第二车道线,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据每条车道线在其相邻车道线的左缓冲区和右缓冲区分别占据的面积大小,获取每条车道线的位置关系,包括:
4.根据权利要求1-3中任一项所述的方法,其特征在于,所述分别获取所述第一车道线的第一端点、所述第二车道线的第二端点,包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述第一车道线、所述第一端点,获取第一顶点、第二顶点,包括:
6.根据权利要求2所述的方法,其特征在于,所述根据车道线数据,生成每条车道线的左缓冲区和右缓冲区,包括:
7.一种斑马线框生成装置,其特征在于,包括:
8.根据权利要求7所述的装置,其特征在于,所述车道线获取模块,还用于根据车道线数据,生成每条车道线的左缓冲区和右缓冲区;根据每条车道线在其相邻车道线的左缓冲区和右缓冲区分别占据的面积大小,获取每条车道线的位置关系;根据所述每条车道线的位置关系,确定位于路面两侧的第一车道线和第二车道线。
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于:其上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如权利要求1-6中任一项所述的方法。
技术总结
本申请涉及一种斑马线框生成方法、装置、电子设备及存介质。该方法包括:根据车道线数据,确定位于路面两侧的第一车道线和第二车道线;分别获取第一车道线的第一端点、第二车道线的第二端点;根据第一车道线、第一端点和第二端点,获取第一顶点、第二顶点;根据第二车道线、第一端点和第二端点,获取第三顶点、第四顶点;根据第一顶点、第二顶点、第三顶点、第四顶点,确定斑马线框。本申请提供的方案,能够确定并排车道线的准确位置,且根据并排车道线确定斑马线的斑马线框,提高斑马线框的生成精度,在高精地图准确地生成斑马线框。
技术研发人员:王录超,万如,伍越,贾双成
受保护的技术使用者:智道网联科技(北京)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!