车站屏的故障检测方法及装置、电子设备及存储介质与流程
本发明涉及安监领域,具体而言,涉及一种车站屏的故障检测方法及装置、电子设备及存储介质。
背景技术:
1、相关技术中,在视频识别领域,主要存在泛用性差的问题,当涉及到新场景的识别,需要重新调整参数或设计新的算法,在地铁,机场,车站等场景下,目前尚无相关应用。在地铁站台层与其他相关场景区别较大,地铁人流量大,场景复杂,易产生遮挡,如果采用常规视频识别方法易产生误报。
2、相关技术中的既有视频识别方法没有用于乘客信息屏与广告灯箱的检测方法,大部分用于站台门夹人夹物或者客流量统计预测等,无法适用于复杂场景,而车站内的显示屏都是自动播放,如果出现硬件故障或软件故障,导致显示问题,不能及时发现。
3、针对相关技术中存在的上述问题,暂未发现有效的解决方案。
技术实现思路
1、本发明提供了一种车站屏的故障检测方法及装置、电子设备及存储介质。
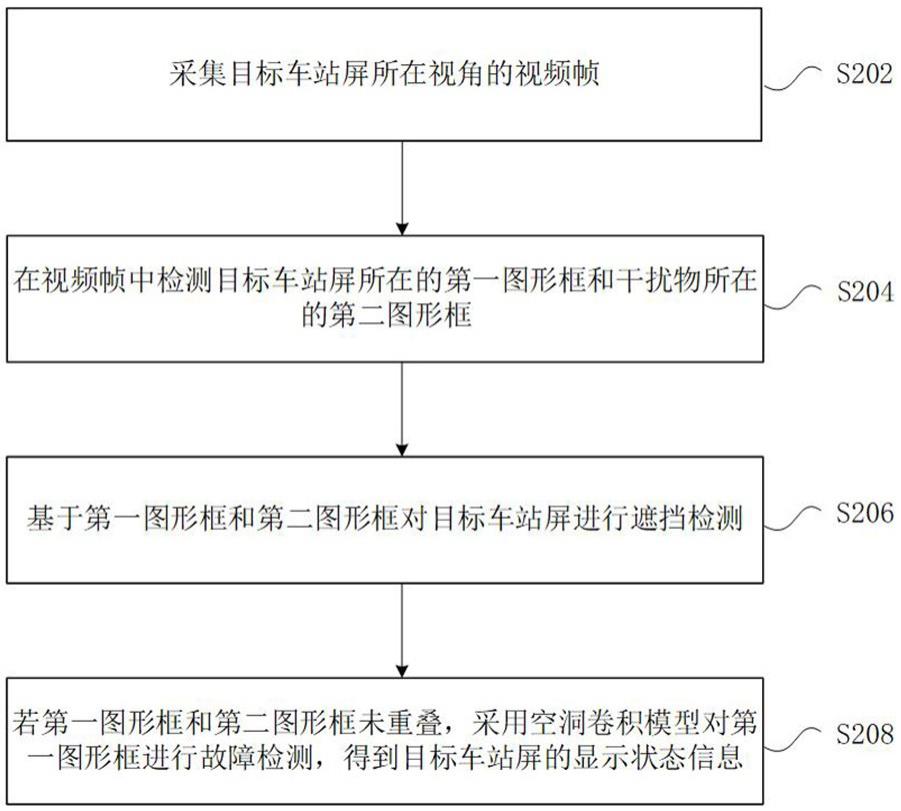
2、根据本技术实施例的一个方面,提供了一种车站屏的故障检测方法,所述方法包括:采集目标车站屏所在视角的视频帧;在所述视频帧中检测所述目标车站屏所在的第一图形框和干扰物所在的第二图形框;基于所述第一图形框和所述第二图形框对所述目标车站屏进行遮挡检测;若所述第一图形框和所述第二图形框未重叠,采用空洞卷积模型对所述第一图形框进行故障检测,得到所述目标车站屏的显示状态信息。
3、进一步,在所述视频帧中检测所述目标车站屏所在的第一图形框和干扰物所在的第二图形框包括:对所述视频帧进行亚像素角点检测,识别所述视频帧中的兴趣域和非兴趣域;采用yolo算法对所述非兴趣域进行行人检测,生成所述非兴趣域中的行人框;将所述兴趣域所在的区域确定为所述目标车站屏所在的第一图形框,将所述行人框所在的区域确定为干扰物所在的第二图形框。
4、进一步,对所述视频帧进行亚像素角点检测,识别所述视频帧中的兴趣域和非兴趣域包括:对所述视频帧中的亚像素角点进行迭代检测,确定亚像素点集合;针对所述亚像素点集合中的每个亚像素点q,遍历执行以下步骤:在所述视频帧中以所述q点为中心,对距离所述q点预设范围内的像素点进行高斯滤波,得到平滑点集合;分别计算所述平滑点集合中每个平滑点p的求导梯度g;根据所述求导梯度,和对应平滑点p与所述q点之间的距离,计算对应平滑点p的权重;基于所述权重判断所述q是否满足预设精度要求;在所述亚像素点集合遍历完成之后,将满足预设精度要求的所有平滑点围成的区域确定为兴趣域,所述视频帧中除所述兴趣域之外的其他区域确定为非兴趣域。
5、进一步,根据所述求导梯度,和对应平滑点p与所述q点之间的距离,计算对应平滑点p的权重包括:采用以下公式计算平滑点的权重:;其中,di为q点与点的距离归一化值,为的求导梯度,t为转置符。
6、进一步,基于所述权重判断所述q是否满足预设精度要求包括:采用以下公式计算计算所述q的精度值:;其中,为平滑点的权重,n为平滑点集合中的平滑点总数,为平滑点在所述第一图形框中的二维坐标值。
7、进一步,采用空洞卷积模型对所述第一图形框进行故障检测,得到所述目标车站屏的显示状态信息包括:采用所述第一图形框配置空洞卷积层,得到空洞卷积模型,其中,空洞卷积模型包括依次连接的输入层、空洞卷积层、编码层、自注意力层、解码层、输出层,所述空洞卷积层用于对所述输入层输出的图形进行下采样;将所述第一图形框输入所述空洞卷积模型,输出所述目标车站屏的显示状态信息,其中,所述状态信息用于表征所述目标车站屏是否发生显示故障。
8、进一步,采用所述第一图形框配置空洞卷积层包括:解析所述第一图形框,提取所述第一图形框包含的像素量;基于所述像素量选择匹配的卷积核空洞系数,其中,所述卷积核空洞系数用于指示卷积核处理的像素点之间的间距;采用所述卷积核空洞系数配置所述空洞卷积层。
9、根据本技术实施例的另一个方面,还提供了一种车站屏的故障检测装置,包括:采集模块,用于采集目标车站屏所在视角的视频帧;第一检测模块,用于在所述视频帧中检测所述目标车站屏所在的第一图形框和干扰物所在的第二图形框;第二检测模块,用于基于所述第一图形框和所述第二图形框对所述目标车站屏进行遮挡检测;第三检测模块,用于若所述第一图形框和所述第二图形框未重叠,采用空洞卷积模型对所述第一图形框进行故障检测,得到所述目标车站屏的显示状态信息。
10、进一步,所述第一检测模块包括:识别单元,用于对所述视频帧进行亚像素角点检测,识别所述视频帧中的兴趣域和非兴趣域;生成单元,用于采用yolo算法对所述非兴趣域进行行人检测,生成所述非兴趣域中的行人框;确定单元,用于将所述兴趣域所在的区域确定为所述目标车站屏所在的第一图形框,将所述行人框所在的区域确定为干扰物所在的第二图形框。
11、进一步,所述识别单元包括:检测子单元,用于对所述视频帧中的亚像素角点进行迭代检测,确定亚像素点集合;遍历子单元,用于针对所述亚像素点集合中的每个亚像素点q,遍历执行以下步骤:在所述视频帧中以所述q点为中心,对距离所述q点预设范围内的像素点进行高斯滤波,得到平滑点集合;分别计算所述平滑点集合中每个平滑点p的求导梯度g;根据所述求导梯度,和对应平滑点p与所述q点之间的距离,计算对应平滑点p的权重;基于所述权重判断所述q是否满足预设精度要求;确定子单元,用于在所述亚像素点集合遍历完成之后,将满足预设精度要求的所有平滑点围成的区域确定为兴趣域,所述视频帧中除所述兴趣域之外的其他区域确定为非兴趣域。
12、进一步,所述遍历子单元还用于:采用以下公式计算平滑点的权重:;其中,di为q点与点的距离归一化值,为的求导梯度,t为转置符。
13、进一步,所述遍历子单元还用于:采用以下公式计算计算所述q的精度值:;其中,为平滑点的权重,n为平滑点集合中的平滑点总数,为平滑点在所述第一图形框中的二维坐标值。
14、进一步,所述第三检测模块包括:配置单元,用于采用所述第一图形框配置空洞卷积层,得到空洞卷积模型,其中,空洞卷积模型包括依次连接的输入层、空洞卷积层、编码层、自注意力层、解码层、输出层,所述空洞卷积层用于对所述输入层输出的图形进行下采样;输出单元,用于将所述第一图形框输入所述空洞卷积模型,输出所述目标车站屏的显示状态信息,其中,所述状态信息用于表征所述目标车站屏是否发生显示故障。
15、进一步,所述配置单元包括:解析子单元,用于解析所述第一图形框,提取所述第一图形框包含的像素量;选择子单元,用于基于所述像素量选择匹配的卷积核空洞系数,其中,所述卷积核空洞系数用于指示卷积核处理的像素点之间的间距;配置子单元,用于采用所述卷积核空洞系数配置所述空洞卷积层。
16、根据本技术实施例的另一方面,还提供了一种存储介质,该存储介质包括存储的程序,程序运行时执行上述的步骤。
17、根据本技术实施例的另一方面,还提供了一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;其中:存储器,用于存放计算机程序;处理器,用于通过运行存储器上所存放的程序来执行上述方法中的步骤。
18、本技术实施例还提供了一种包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行上述方法中的步骤。
19、通过本发明,采集目标车站屏所在视角的视频帧,在视频帧中检测目标车站屏所在的第一图形框和干扰物所在的第二图形框,基于第一图形框和第二图形框对目标车站屏进行遮挡检测,若第一图形框和第二图形框未重叠,采用空洞卷积模型对第一图形框进行故障检测,得到目标车站屏的显示状态信息,可有效应对复杂场景下的乘客信息屏和广告灯箱等车站屏进行位置识别,通过遮挡识别可解决因行人遮挡带来的误报,通过空洞卷积模型可快速精准判断目标车站屏的显示状态信息,解决了相关技术不能对车站显示屏基于视觉进行故障检测的技术问题,具有识别精度高、识别范围广、运行实时可靠等优点。
- 还没有人留言评论。精彩留言会获得点赞!