目标对象视觉跟踪方法、装置、电子设备及存储介质与流程
本发明涉及施工安全监管,尤其涉及一种目标对象视觉跟踪方法、装置、电子设备及存储介质。
背景技术:
1、随着施工行业的快速发展,产业规模的不断扩大,原有的施工安全监管方法呈现各种弊端。例如,施工人员对现场环境不熟悉,超范围作业;施工时出现障碍物遮挡视线,施工人员在不能辨别方向的情况下走失、走散。各种因素时刻威胁着人员生命及财产安全。此外,施工现场环境复杂,工具种类繁多,经常出现现场遗失的情况,很难寻找,导致项目风险增加。
2、为了使得施工安全得到保证,人们想出了各种办法,例如,在施工现场加装围栏,并建立门禁系统,然而,应用有围栏和门禁系统的监管方法,并不能有效解决场内的安全问题。
3、另一种安全监管方法是安装视频监控。而安装视频监控后的监管系统,如果通过传统的视觉处理算法发现场内安全隐患,则存在在监管目标对象较多时,视觉处理算法的计算量大,实时性较差的问题。
4、基于此,需要开发设计出一种目标对象视觉跟踪方法。
技术实现思路
1、本发明实施方式提供了一种目标对象视觉跟踪方法、装置、电子设备及存储介质,用于解决现有技术中视觉处理算法计算量大的问题。
2、第一方面,本发明实施方式提供了一种目标对象视觉跟踪方法,包括:
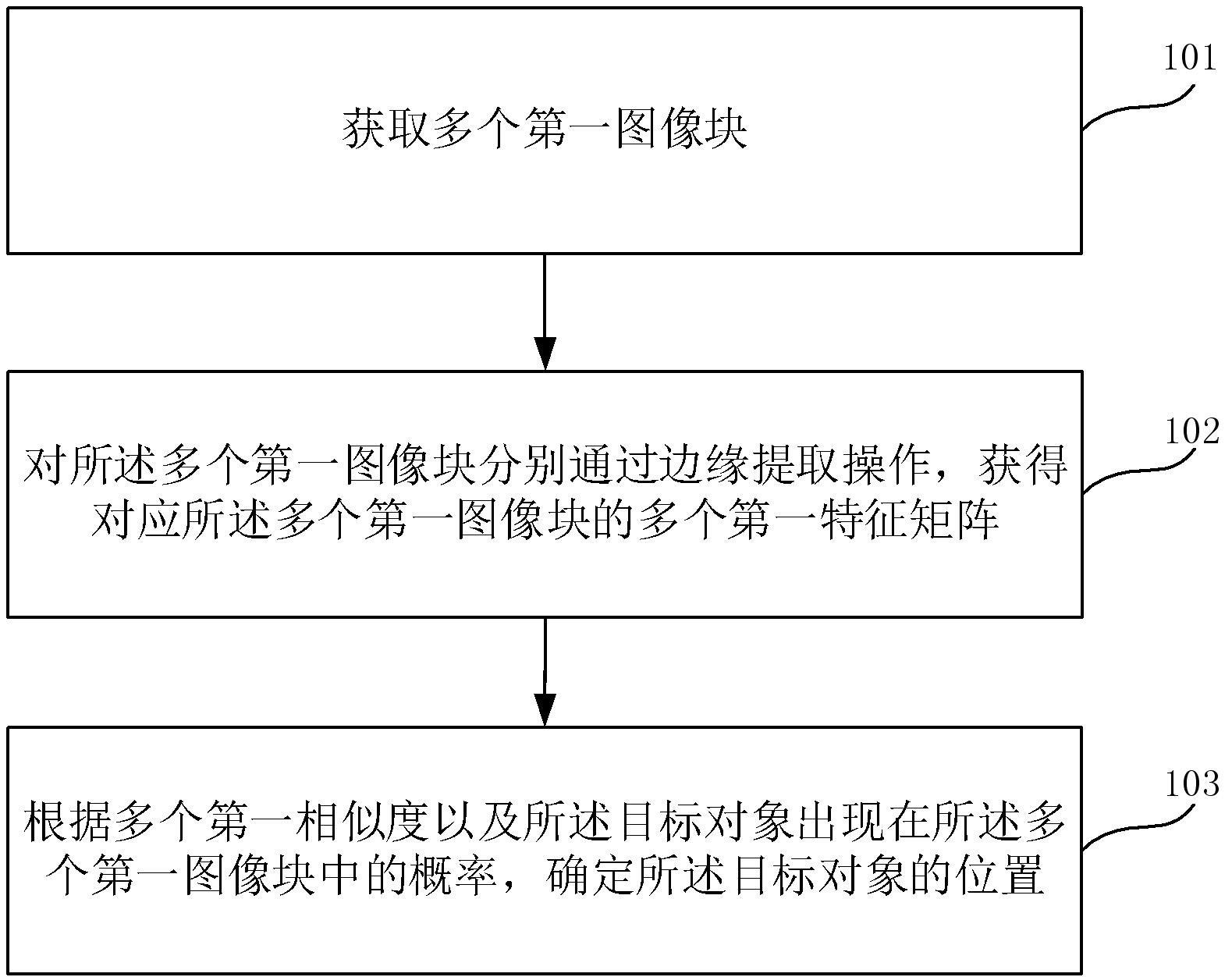
3、获取多个第一图像块,其中,第一图像块基于目标区域的图像划分获得,所述目标区域表征目标对象出现的区域;
4、对所述多个第一图像块分别通过边缘提取操作,获得对应所述多个第一图像块的多个第一特征矩阵;
5、根据多个第一相似度以及所述目标对象出现在所述多个第一图像块中的概率,确定所述目标对象的位置,其中,第一相似度根据第一特征矩阵以及第一目标图像块的特征矩阵确定,所述第一相似度表征第一图像块与所述第一目标图像块的相似程度,所述第一目标图像块包含所述目标对象的图像。
6、在一种可能实现的方式中,所述获取多个第一图像块,包括:
7、获取第一位置、第二位置以及第三位置,其中,所述第一位置、所述第二位置以及所述第三位置基于所述第一目标图像块、第二目标图像块以及第三目标图像块确定,所述第二目标图像块以及所述第三目标图像块包含所述目标对象的图像,所述第一目标图像块、所述第二目标图像块以及所述第三目标图像块所对应的时间节点依次排列;
8、根据所述第一位置、所述第二位置以及所述第三位置确定所述目标对象的移动方向、方向变化率、移动速度以及移动速度变化率;
9、根据所述移动方向、所述方向变化率、所述移动速度以及所述移动速度变化率,确定目标移动方向以及移动半径;
10、根据所述第一位置、所述目标移动方向以及所述移动半径,确定所述目标区域,其中,所述目标区域为以所述第一位置为中心的矩形,所述目标区域的长轴或短轴与所述目标移动方向平行,所述目标区域内包含有规划圆,所述规划圆为以所述第一位置为圆心且以所述移动半径为半径的圆;
11、按所述目标区域的长轴和短轴,将所述目标区域的图像划分获得的多个图像块作为所述多个第一图像块。
12、在一种可能实现的方式中,所述对所述多个第一图像块分别通过边缘提取操作,获得对应所述多个第一图像块的多个第一特征矩阵,包括:
13、获取目标行数以及目标列数,其中,所述目标行数和所述目标列数分别为所述第一目标图像块的特征矩阵的行数和列数;
14、对于所述多个第一图像块中的每个图像块,分别执行如下操作:
15、对图块进行去色,获得灰度图;
16、采用水平边缘检测模板以及竖直边缘检测模板,对所述灰度图提取水平边缘特征矩阵以及竖直边缘特征矩阵;
17、根据所述水平边缘特征矩阵以及所述竖直边缘特征矩阵,通过边缘合成以及断点接续的方式构建表征边缘特征的融合矩阵;
18、删除所述融合矩阵的边缘空白行以及边缘空白列,其中,所述边缘空白行和所述边缘空白列分别为位于所述融合矩阵的边缘的不包括有边缘特征的行和列;
19、根据所述目标行数以及所述目标列数,对删除操作后的融合矩阵进行池化操作,将经过池化操作后的融合矩阵作为第一特征矩阵。
20、在一种可能实现的方式中,所述采用水平边缘检测模板以及竖直边缘检测模板,对所述灰度图提取水平边缘特征矩阵以及竖直边缘特征矩阵,包括:
21、获取定位指示、所述水平边缘检测模板以及所述竖直边缘检测模板;
22、根据所述定位指示,从所述灰度图中取出与所述水平边缘检测模板以及所述竖直边缘检测模板同型的第一数据块;
23、根据第一公式、所述水平边缘检测模板以及所述竖直边缘检测模板,提取所述第一数据块的水平边缘特征以及竖直边缘特征,其中,所述第一公式为:
24、
25、式中,为水平边缘特征或竖直边缘特征,为水平边缘检测模板或所述竖直边缘检测模板第行第列的元素,为第一数据块第行第列的元素,为第一数据块的行数,为第一数据块的列数;
26、根据所述定位指示,将所述水平边缘特征以及所述竖直边缘特征,分别加入到所述水平边缘特征矩阵以及所述竖直边缘特征矩阵中;
27、若所述定位指示未达到所述灰度图的末尾,则按照预定的偏移距离对所述定位指示进行偏移,并跳转至所述根据所述定位指示,从所述灰度图中取出与所述水平边缘检测模板以及所述竖直边缘检测模板同型的第一数据块的步骤。
28、在一种可能实现的方式中,所述根据所述水平边缘特征矩阵以及所述竖直边缘特征矩阵,通过边缘合成以及断点接续的方式构建表征边缘特征的融合矩阵,包括:
29、获取边缘检测阈值以及邻域半径;
30、计算所述水平边缘特征矩阵与所述竖直边缘特征矩阵对应元素的平均值,并将平均值加入融合矩阵;
31、将所述融合矩阵中小于所述边缘检测阈值的元素清零;
32、获取所述融合矩阵中的断点,其中,所述断点为表征边缘开环的点;
33、对于所述融合矩阵中的每个断点,执行如下步骤:
34、根据所述邻域半径获得断点邻域内的多个邻域点;
35、根据第二公式,判断所述多个邻域点的连续性,其中,所述第二公式为:
36、
37、式中,为第一断点阈值,为第二断点阈值,为断点在水平边缘特征矩阵中的值,为断点在竖直边缘特征矩阵中的值,为邻域点在水平边缘特征矩阵中的值,为邻域点在竖直边缘特征矩阵中的值;
38、若所述多个邻域点中存在满足所述第二公式的点,则将满足所述第二公式的点作为断点,将所述断点的接续平均值替换所述断点在所述融合矩阵中的值,并跳转至所述根据所述邻域半径获得断点邻域内的多个邻域点的步骤,其中,所述接续平均值为所述接续点在竖直边缘特征矩阵中的值和在水平边缘特征矩阵中的值的平均值。
39、在一种可能实现的方式中,所述根据多个第一相似度以及所述目标对象出现在所述多个第一图像块中的概率,确定所述目标对象的位置,包括:
40、若所述多个第一相似度中存在一个高于第一相似阈值的第一相似度,则将高于第一相似阈值的第一相似度作为目标相似度,并根据所述目标相似度所对应的第一图像块确定所述目标对象的位置;
41、否则,根据第二相似阈值和所述多个第一相似度,确定多个标签,根据所述多个标签、多个位置概率以及多个条件图像相似概率,确定所述目标对象出现的第一图像块,并根据所述目标对象出现的第一图像块,确定所述目标对象的位置,其中,标签表征第一图像块是否与所述第一目标图像块相似,所述位置概率为所述目标对象出现在第一图像块的概率,条件图像相似概率为出现在第一图块位置时图像相似的概率,所述第二相似阈值小于所述第一相似阈值。
42、在一种可能实现的方式中,所述根据所述多个标签、多个位置概率以及多个条件图像相似概率,确定所述目标对象出现的第一图像块,包括:
43、根据第三公式、所述多个位置概率以及所述多个条件图像相似概率,确定图像相似概率,其中,所述图像相似概率为所述多个第一图像块中存在相似图像块的概率,所述第三公式为:
44、
45、式中,为图像相似概率,为目标对象出现在第个第一图像块中时第一图像块相似的概率,为目标对象出现在第个第一图像块的先验概率,为目标对象未出现在第个第一图像块中时第一图像块相似的概率,为目标对象未出现在第个第一图像块的先验概率,为第一图像块的数量;
46、根据第四公式、所述多个标签、所述图像相似概率、所述多个位置概率以及所述多个条件图像相似概率,确定多个条件位置概率,其中,条件位置概率表征图像相似时所述目标对象出现在第一图像块的概率或图像不相似时所述目标对象出现在第一图像块的概率,所述第四公式为:
47、
48、式中,为条件位置概率,为图像相似时目标对象出现在第个第一图像块的概率,为标签,为图像不相似时目标对象出现在第个第一图像块的概率,为目标对象出现在第个第一图像块中时第一图像块不相似的概率,为图像不相似概率;
49、根据第五公式以及所述多个条件位置概率,确定所述目标对象出现在每个第一图像块中的后验概率,其中,所述第五公式为:
50、
51、式中,为目标对象出现在第个第一图像块中的后验概率;
52、将目标第一图像块作为所述目标对象出现的第一图像块,其中,所述目标第一图像块的后验概率最大且所述目标第一图像块的后验概率大于后验概率阈值。
53、第二方面,本发明实施方式提供了一种目标对象视觉跟踪装置,用于实现如上第一方面或第一方面的任一种可能的实现方式所述的目标对象视觉跟踪方法,所述目标对象视觉跟踪装置包括:
54、图像块获取模块,用于获取多个第一图像块,其中,第一图像块基于目标区域的图像划分获得,所述目标区域表征目标对象出现的区域;
55、特征矩阵提取模块,用于对所述多个第一图像块分别通过边缘提取操作,获得对应所述多个第一图像块的多个第一特征矩阵;
56、以及,
57、目标对象跟踪模块,用于根据多个第一相似度以及所述目标对象出现在所述多个第一图像块中的概率,确定所述目标对象的位置,其中,第一相似度根据第一特征矩阵以及第一目标图像块的特征矩阵确定,所述第一相似度表征第一图像块与所述第一目标图像块的相似程度,所述第一目标图像块包含所述目标对象的图像。
58、第三方面,本发明实施方式提供了一种电子设备,包括存储器以及处理器,所述存储器中存储有可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上第一方面或第一方面的任一种可能的实现方式所述方法的步骤。
59、第四方面,本发明实施方式提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上第一方面或第一方面的任一种可能的实现方式所述方法的步骤。
60、本发明实施方式与现有技术相比存在的有益效果是:
61、本发明实施方式公开了一种目标对象视觉跟踪方法,其首先获取多个第一图像块,其中,第一图像块基于目标区域的图像划分获得,所述目标区域表征目标对象出现的区域;然后对所述多个第一图像块分别通过边缘提取操作,获得对应所述多个第一图像块的多个第一特征矩阵;最后根据多个第一相似度以及所述目标对象出现在所述多个第一图像块中的概率,确定所述目标对象的位置,其中,第一相似度根据第一特征矩阵以及第一目标图像块的特征矩阵确定,所述第一相似度表征第一图像块与所述第一目标图像块的相似程度,所述第一目标图像块包含所述目标对象的图像。本发明实施方式根据图像块的边缘特征构建的边缘特征矩阵,根据边缘特征矩阵以及包含有目标对象的图像的边缘特征矩阵判断相似度,并根据目标对象出现在图像块中的概率,确定目标对象的位置,其计算量要小于现有的算法,而且,由于考虑了出现在图像块的概率,因此,在目标对象被部分的遮盖时,仍旧能够对其进行跟踪,提高了跟踪识别率。
- 还没有人留言评论。精彩留言会获得点赞!