一种用于工程建设期的AR定位系统与方法与流程
本发明涉及ar空间识别与定位,具体涉及一种用于工程建设期的ar定位系统与方法。
背景技术:
1、ar技术又被称作“增强现实技术”,是一种将物理世界信息和虚拟世界信息“无缝”集成的新技术,通过计算机等科学技术,模拟仿真后再与现实环境叠加融合,将虚拟的信息应用到真实世界,被人类感官所感知,从而达到超越现实的视听体验。
2、随着工程建设与管理逐渐朝着基于bim的数字信息管理方向发展,需要有更为直观的视觉化平台来有效利用这些信息,ar这种将相应的数字化信息植入到现实世界界面的技术,将有力地填补这一可视化管理平台的缺失。工程建设期的ar应用与空间定位技术紧密相连,尤其是在ar场景中应用质量检查、地下空间查询等业务功能,需要在同一场景内将虚拟信息与现实环境进行高精度的拟合,才能为后续工程的施工与维修提供便利,因此对现实环境定位的精准性要求较高。当前,空间识别与定位技术受限于硬件、算法、算力的不足,准确性和稳定性并不高,这也限制了工程建设期的ar应用深度。
3、现有的ar定位技术可以包括以下几种方法:
4、第一种,在ar应用开发时引入gps定位服务功能,将虚拟信息放在对应的经纬度坐标上。该方法的缺点是:1、定位误差较大;2、定位错误后,无法进行动态纠偏;3、定位过程中会不断偏移;4、无法准确获得高程的定位数据。
5、第二种,扫描获得整个场景的网格数据,开发时将其作为基准在对应现实的位置摆放虚拟信息。该方法的缺点是:1、扫描成本较大;2、建设期现场环境复杂多变,很难一次性捕获需要的特征环境;3、数据量庞大,存储不便,同时会消耗软硬件性能。
6、第三种,采用单识别点定位,通常是将单副二维码或者图片作为识别定位的基准,然后虚拟信息根据此基准,在相对位置进行摆放与对齐。1、定位精度较差;2、一旦视域离开此识别点,误差会越来越大;3、较难判定初始定位的准确性。
7、综上所述,提升ar定位的精准度是工程建设期应用的迫切需求。
技术实现思路
1、本发明为解决现有技术中的不足,提供一种用于工程建设期的ar定位系统与方法,利用多固定特征环境的网格数据构建空间参照阵列,将网格动态定位与视频流动态定位连接,实现物理空间的高精准定位。
2、本发明采用的技术方案为:
3、一种用于工程建设期的ar定位系统,包括数据导入模块、空间参照阵列创建模块、虚拟信息放置模块、特征点比对分析模块、定位与纠偏模块、输出模块:
4、所述数据导入模块,包含fbx格式转化子模块、信息数据导入子模块;fbx格式转化子模块用于将网格数据与外部虚拟信息转化成fbx格式,通过信息数据导入子模块导入游戏引擎中。
5、所述空间参照阵列创建模块,用于将所述数据导入模块转化后的网格数据进行整合,包含数据坐标信息读取子模块、数据自分布子模块、空间参照阵列子模块;数据坐标信息读取子模块用于读取数据导入时所带的坐标信息,数据自分布子模块根据读取的坐标信息进行数据的自动分布,空间参照阵列子模块在数据自分布的基础上进行空间参照阵列的构建,并且对空间参考阵列进行存储与展示。
6、所述虚拟信息放置模块,用于将所述数据导入模块转化后的虚拟信息放入所述空间参照阵列子模块中对应的标记位置,该位置为虚拟信息在现实环境中需要映射的位置;
7、所述特征点比对分析模块,用于将所述空间参照阵列子模块中的网格数据与移动设备摄像头获取的实时画面进行对比分析,包含特征点提取比对子模块、位姿计算子模块、位姿计算结果输出子模块;特征点提取比对子模块用于从摄像头拍摄的实时图像中提取2d特征点并与空间参照阵列子模块中的3d网格点进行比对分析,位姿计算子模块是基于特征点提取比对子模块比对分析的结果计算摄像头的实时位姿,通过位姿计算结果输出子模块输出位姿计算结果。
8、所述定位与纠偏模块,用于调用所述位姿计算结果输出子模块,并根据摄像头当前视角重构空间坐标系,把虚拟信息重新绘制至现实环境中的正确位置;
9、所述输出模块,用于虚拟信息与现实环境画面混合后输出给终端用户。
10、一种用于工程建设期的ar定位方法,包括以下步骤:
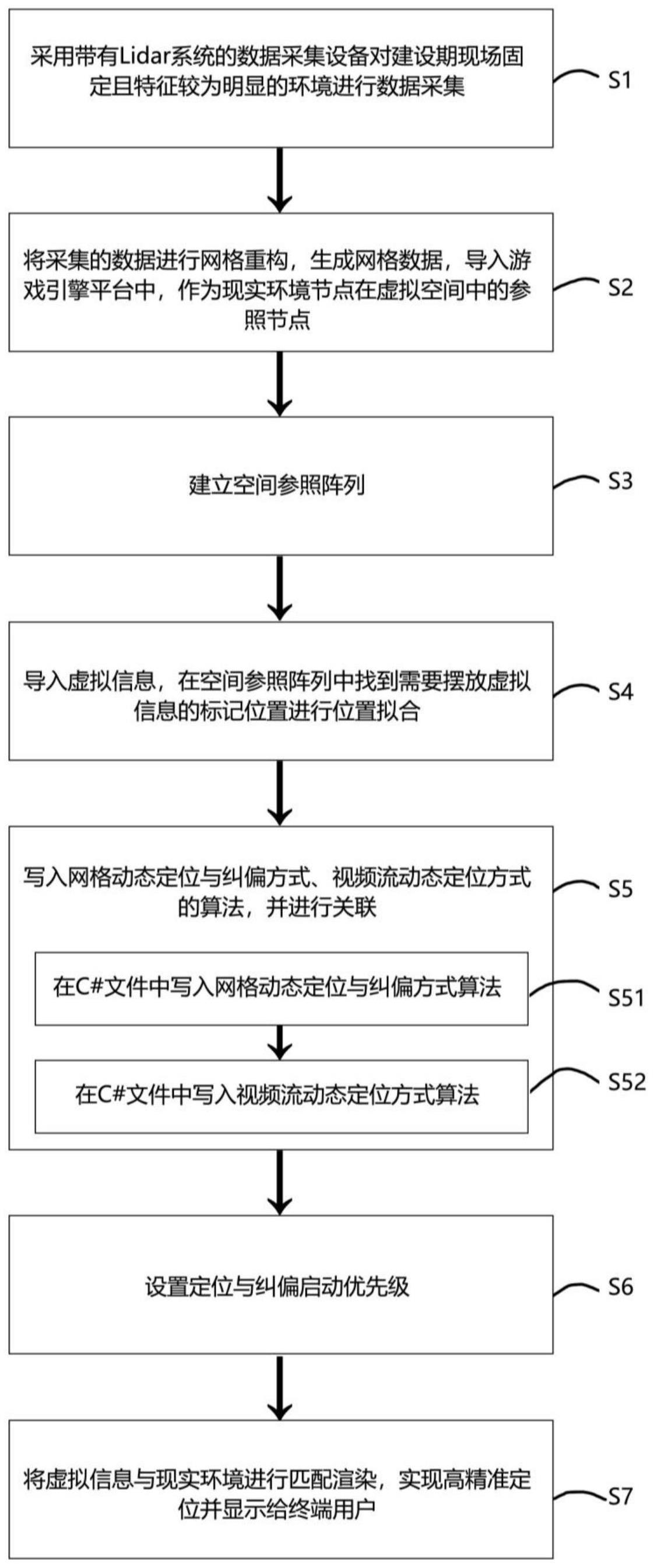
11、s1,采用带有lidar系统的数据采集设备对建设期现场固定且特征较为明显的环境进行数据采集;
12、s2,将采集的数据进行网格重构,生成网格数据,导入游戏引擎平台中,作为现实环境节点在虚拟空间中的参照节点;
13、s3,建立空间参照阵列;
14、s4,导入虚拟信息,在空间参照阵列中找到需要摆放虚拟信息的标记位置进行位置拟合;
15、s5,写入网格动态定位与纠偏方式、视频流动态定位方式的算法,并进行关联;
16、s6,设置定位与纠偏启动优先级;
17、s7,将虚拟信息与现实环境进行匹配渲染,实现高精准定位并显示给终端用户。
18、进一步地,在步骤s1中,所述lidar系统是一种集激光、全球定位系统(gps)和惯性导航系统(ins)三种技术于一身的系统,用于获得点云数据并生成精确的数字化三维模型,将现实中单个采集的环境对象作为一个节点进行命名,采集时保证各环境节点的间距不超过10米。
19、进一步,在步骤s2中,所述游戏引擎主要包括unity3d与unreal engine,导入游戏引擎平台后将各参照节点进行命名;
20、进一步地,在步骤s3中,所述空间参照阵列由各节点网格数据数据构成,由于lidar系统采集的数据带有真实位置信息,因此所述空间参照阵列依旧保留原始位置信息。
21、进一步地,在步骤s4中,所述位置拟合依据自测绘数据,在现实环境中预先做好标记然后作为环境节点进行采集,再将转换后的网格数据导入游戏引擎作为参照节点。
22、进一步地,在步骤s5中包括以下子步骤:
23、s51,在ar组件中写入所述网格动态定位与纠偏方式算法,如当摄像头在n1节点视域范围内时,记入摄像头在t、t+1时刻捕获的图像,命名为pt、pt+1,然后对图像中的大量2d特征点进行提取,将提取后的2d特征点与所述空间参照阵列中m1的3d网格点进行匹配,通过计算得到摄像头需要的位姿信息进行定位与纠偏;
24、s52,在ar组件中写入所述视频流动态定位方式的算法,当摄像头在固定特征环境节点视域范围外时,利用ar设备的运动传感器不间断地收集摄像头所拍摄的图像,并从图像中实时提取特征点,然后标记每一个特征点,赋予独立的id身份信息,并不断地追踪这些特征点,当设备移动或者旋转时,连续的图片中的特征点会形成视觉差,利用摄像位姿视觉差进行三角量测,计算出运动过程中缺失的信息进行定位与纠偏。
25、进一步地,在步骤s6中,所述设置定位与纠偏启动优先级为网格动态定位与纠偏优先级高于视频流动态定位与纠偏,移动距离过大视频流动态定位会产生误差,所以要求空间参照阵列中各节点间的距离不超10米,并通过网格动态定位及时纠偏保证定位的准确性。
26、本发明的有益效果是:
27、本发明能有效降低数据采集与存储成本,大大降低设备定位时的性能消耗,可对工程建设期现场进行精准定位,解决了建设期现场因环境变化所带来的不利影响,定位后可进行大范围漫游,并进行动态纠偏,保证当前定位的准确性与稳定性。
- 还没有人留言评论。精彩留言会获得点赞!