一种基于数字孪生仿真平台的地图节点计算方法与流程
本发明涉及节点计算,具体而言,涉及一种基于数字孪生仿真平台的地图节点计算方法。
背景技术:
1、随着工业互联网的飞速发展,在仓储管理、物流调度、城市交通、生产制造等领域,通常会配置多个引导车,例如仓储机器人、物流机器人、自动导引运输车(automatedguided vehicle,简称为agv)、无人驾驶车辆等,以通过调度各个引导车来完成相应的分配任务。就目前而言,在多引导车任务调度场景下,通常按照每个引导车所分配的任务,来规划对应的路径。但是,多个引导车按照所规划好的路径运动时,可能会发生碰撞冲突的情况,导致多引导车在调度过程中出现死锁现象,无法保证多引导车的任务成功执行。基于此,针对上述问题,我们设计了一种基于数字孪生仿真平台的地图节点计算方法。
技术实现思路
1、本发明的目的在于提供一种基于数字孪生仿真平台的地图节点计算方法,其能够在输入任意大小引导车、任意路径长度和路径间角度下灵活计算节点长度和时间窗,相比于固定节点大小的方法,能够对后续基于时间窗对多个引导车在复杂不规则场景地图中的行进路径进行冲突辨识提供了良好的实现基础,可提高冲突辨识的精确性。
2、本发明的实施例通过以下技术方案实现:
3、一种基于数字孪生仿真平台的地图节点计算方法,该方法的步骤包括:
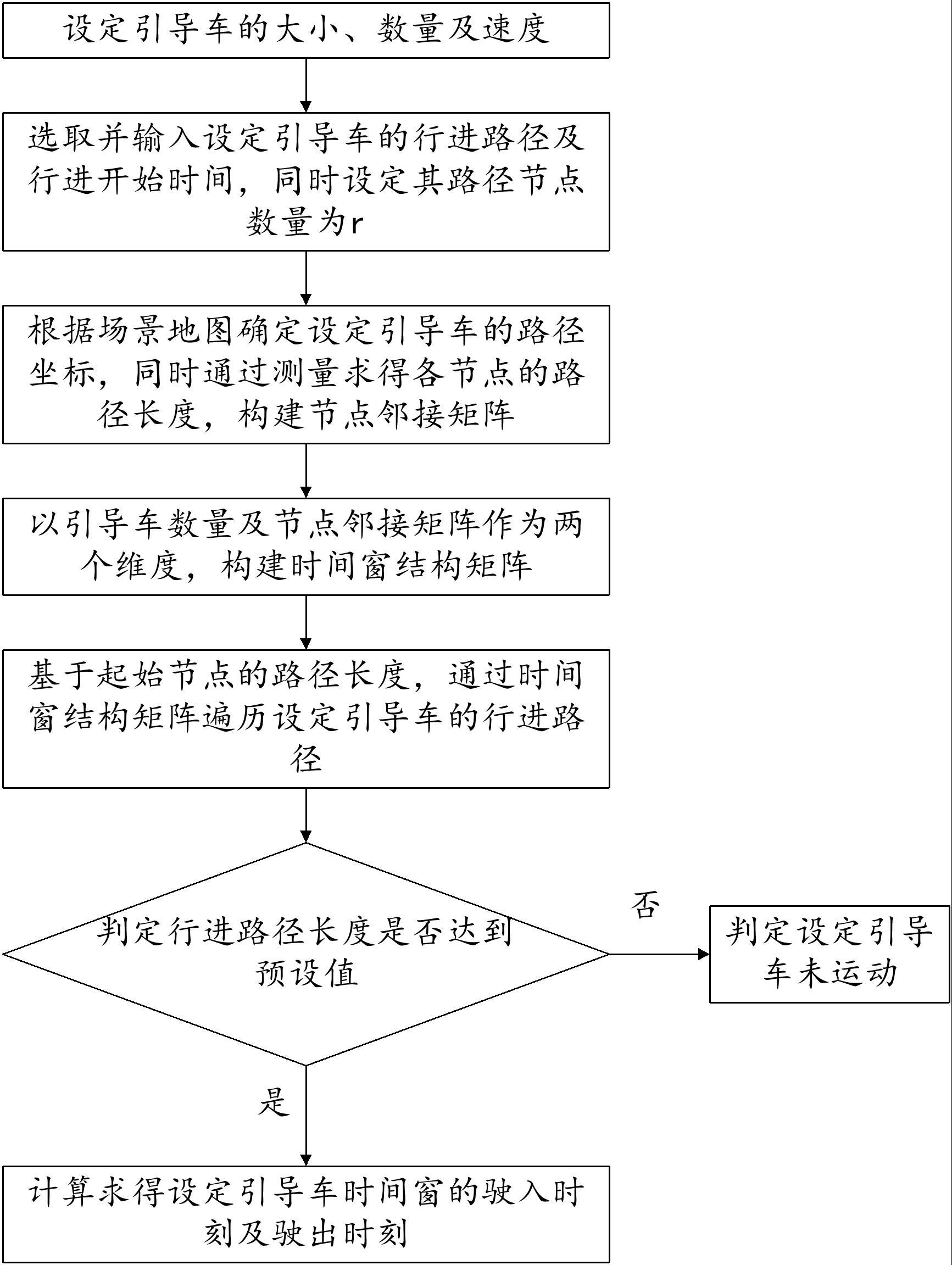
4、设定引导车的大小、数量及速度;
5、选取并输入设定引导车的行进路径及行进开始时间,同时设定其路径节点数量为r,根据场景地图确定设定引导车的路径坐标,同时通过测量求得各节点的路径长度,构建节点邻接矩阵;
6、以引导车数量及节点邻接矩阵作为两个维度,构建时间窗结构矩阵,基于起始节点的路径长度,通过时间窗结构矩阵遍历设定引导车的行进路径,同时判定行进路径长度是否达到预设值,若否,则判定设定引导车未运动,若是,则计算求得设定引导车时间窗的驶入时刻及驶出时刻。
7、可选的,所述各节点的路径长度具体包括起始节点的路径长度与一般性节点的路径长度。
8、可选的,所述设定引导车行进路径的起始节点大小具体为以设定引导车的宽度为边长的正方形,求得起始节点的路径长度为。
9、可选的,所述一般性节点的路径长度具体以设定引导车的宽度与通过此节点的路径的最小夹角进行确定,设定b点为当前节点,a点为设定引导车行进路径上b节点的前一个节点,c点为b点的一阶邻域节点集合中除a点外的与a、b两点构成的夹角∠α的余弦值最大的点,若,则;若,则;若,则,其中,为引导车的宽度,map为仿真场景地图节点的邻接矩阵,、分别为a与b两点之间的距离以及c与b两点之间的距离;
10、若b点的一阶邻域节点集合仅存在a点,则节点的路径长度为。
11、可选的,所述余弦值的计算方法如下:
12、。
13、其中,(,,)为a点坐标,(,,)为b点坐标,(,,)为c点坐标,edge1为a点坐标与c点坐标之间的距离,edge2为a点坐标与b点坐标之间的距离,edge3为b点坐标与c点坐标之间的距离。
14、可选的,所述判定行进路径长度是否达到预设值,所述预设值具体为r=2,若r<2,则行进路径无节点或仅有一个节点,判定设定引导车未运动;若r≥2,则遍历行进路径的每一个节点并计算时间窗。
15、可选的,所述起始节点时间窗的驶入时刻和驶出时刻为:
16、
17、其中,起始节点的路径长度为,l为引导车的长度,w为引导车的宽度,v为引导车的速度,intime为时间窗的驶入时刻,outtime为时间窗的驶出时刻。
18、可选的,所述一般性节点时间窗的驶入时刻和驶出时刻计算方式依次为:
19、计算此一般性节点的路径长度;
20、计算此一般性节点时间窗的驶入时刻:
21、
22、计算此一般性节点时间窗的驶出时刻:
23、若节点索引为,则;
24、若非,则。
25、本发明实施例的技术方案至少具有如下优点和有益效果:
26、本发明实施例能够在输入任意大小引导车、任意路径长度和路径间角度下灵活计算节点长度和时间窗,相比于固定节点大小的方法,能够对后续基于时间窗对多个引导车在复杂不规则场景地图中的行进路径进行冲突辨识提供了良好的实现基础,可提高冲突辨识的精确性。
技术特征:
1.一种基于数字孪生仿真平台的地图节点计算方法,其特征在于,该方法的步骤包括:
2.根据权利要求1所述的基于数字孪生仿真平台的地图节点计算方法,其特征在于,所述各节点的路径长度具体包括起始节点的路径长度与一般性节点的路径长度。
3.根据权利要求2所述的基于数字孪生仿真平台的地图节点计算方法,其特征在于,所述设定引导车行进路径的起始节点大小具体为以设定引导车的宽度为边长的正方形,求得起始节点的路径长度为。
4.根据权利要求3所述的基于数字孪生仿真平台的地图节点计算方法,其特征在于,所述一般性节点的路径长度具体以设定引导车的宽度与通过此节点的路径的最小夹角进行确定,设定b点为当前节点,a点为设定引导车行进路径上b节点的前一个节点,c点为b点的一阶邻域节点集合中除a点外的与a、b两点构成的夹角∠α的余弦值最大的点,若,则;若,则;若,则,其中,为引导车的宽度,map为仿真场景地图节点的邻接矩阵,、分别为a与b两点之间的距离以及c与b两点之间的距离;
5.根据权利要求4所述的基于数字孪生仿真平台的地图节点计算方法,其特征在于,所述余弦值的计算方法如下:
6.根据权利要求1-5任一项所述的基于数字孪生仿真平台的地图节点计算方法,其特征在于,所述判定行进路径长度是否达到预设值,所述预设值具体为r=2,若r<2,则行进路径无节点或仅有一个节点,判定设定引导车未运动;若r≥2,则遍历行进路径的每一个节点并计算时间窗。
7.根据权利要求6所述的基于数字孪生仿真平台的地图节点计算方法,其特征在于,所述起始节点时间窗的驶入时刻和驶出时刻为:
8.根据权利要求7所述的基于数字孪生仿真平台的地图节点计算方法,其特征在于,所述一般性节点时间窗的驶入时刻和驶出时刻计算方式依次为:
技术总结
本发明涉及节点计算技术领域,具体而言,涉及一种基于数字孪生仿真平台的地图节点计算方法,该方法的步骤包括:随机设定引导车的大小、数量及速度;选取并输入设定引导车的行进路径及行进开始时间,同时设定其路径节点数量为r,根据场景地图确定设定引导车的路径坐标,同时通过测量求得各节点的路径长度,构建节点邻接矩阵;以引导车数量及节点邻接矩阵作为两个维度,构建时间窗结构矩阵,基于起始节点的路径长度,通过时间窗结构矩阵遍历设定引导车的行进路径,同时判定行进路径长度是否达到预设值,若否,则判定设定引导车未运动,若是,则计算求得设定引导车时间窗的驶入时刻及驶出时刻。
技术研发人员:张雪娟,王巍,熊帆,宋海瑞,黄小兵,陆远斌,邱池,宋森平
受保护的技术使用者:民航机场成都电子工程设计有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!