一种巡逻机器人协同违章取证方法、系统及介质与流程
本技术涉及违章取证领域,具体而言,涉及一种巡逻机器人协同违章取证方法、系统及介质。
背景技术:
1、随着近几年道路交通运输业的迅猛发展,各类交通违章行为的频发给交通监管机构带了巨大的压力。基于深度学习的车辆行为视频系统可以通过信息化、智能化手段,有效的监管路况,对不同的违章行为及时反馈上传,达到提高监管效率、降低人力成本的目的,本发明针对智能交通系统中的车辆识别、车辆违章及其他车辆行为的判定等核心功能及关键技术进行研究并完成系统实现,针对上述问题,目前亟待有效的技术解决方案。
技术实现思路
1、本技术实施例的目的在于提供一种巡逻机器人协同违章取证方法、系统及介质,可以通过判断车辆行为信息与违章行为信息进行比较,对车辆进行智能违章识别,提高违章识别的智能化的技术。
2、本技术实施例还提供了一种巡逻机器人协同违章取证方法,包括:
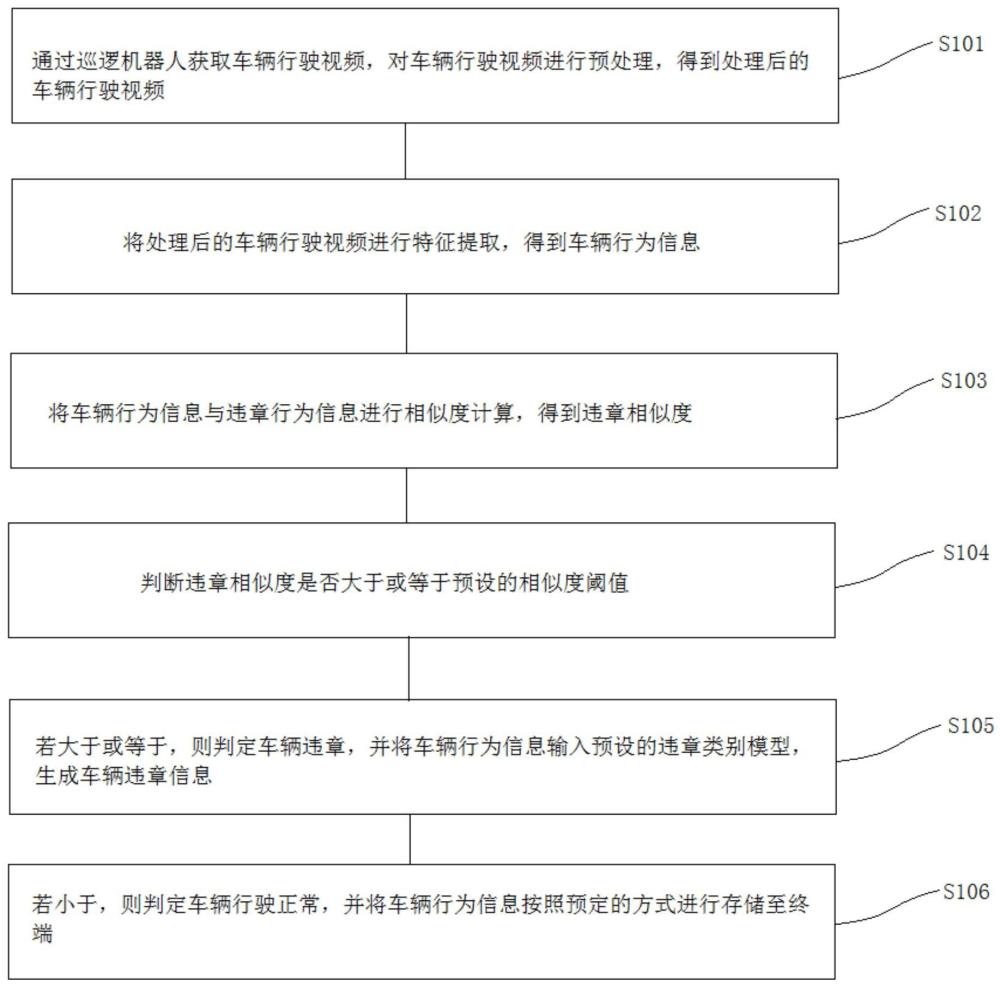
3、通过巡逻机器人获取车辆行驶视频,对车辆行驶视频进行预处理,得到处理后的车辆行驶视频;
4、将处理后的车辆行驶视频进行特征提取,得到车辆行为信息;
5、将车辆行为信息与违章行为信息进行相似度计算,得到违章相似度;
6、判断所述违章相似度是否大于或等于预设的相似度阈值;
7、若大于或等于,则判定车辆违章,并将车辆行为信息输入预设的违章类别模型,生成车辆违章信息;
8、若小于,则判定车辆行驶正常,并将车辆行为信息按照预定的方式进行存储至终端。
9、可选地,在本技术实施例所述的巡逻机器人协同违章取证方法中,所述通过巡逻机器人获取车辆行驶视频,对车辆行驶视频进行预处理,得到处理后的车辆行驶视频,包括:
10、获取巡逻机器人位置信息;
11、根据巡逻机器人位置信息建立巡逻协同模型;
12、根据巡逻协同模型建立多巡逻机器人协同策略;
13、根据多巡逻机器人协同策略建立多巡逻机器人编组,得到编组信息;
14、根据编组信息对多巡逻机器人建立行驶队列信息;
15、多巡逻机器人按照行驶队列信息进行协同行驶采集多个方位的车辆行驶视频;
16、将多个方位的车辆行驶视频进行融合,得到全方位车辆行驶视频。
17、可选地,在本技术实施例所述的巡逻机器人协同违章取证方法中,所述根据编组信息对多巡逻机器人建立行驶队列信息,包括:
18、获取行驶队列信息,根据行驶队列信息生成巡逻机器人编组数量;
19、判断当前编组内巡逻机器人数量是否满足预设的编组数量;
20、若不满足,则生成巡逻机器人数量差值,根据巡逻机器人数量差值生成调用数量;
21、若满足,则获取编组内各个巡逻机器人位置信息,建立位置关系模型;
22、根据位置关系模型建立位置补偿信息;
23、根据位置补偿信息对当前编组内的巡逻机器人进行位置调整。
24、可选地,在本技术实施例所述的巡逻机器人协同违章取证方法中,所述若不满足,则生成巡逻机器人数量差值,根据巡逻机器人数量差值生成调用数量;包括:
25、获取当前编组内巡逻机器人位置信息,
26、根据位置信息建立调用区域信息,并采集调用区域内的巡逻机器人位置信息;
27、将调用区域内的巡逻机器人位置信息与当前编组内巡逻机器人位置进行比较,得到距离信息;
28、判断所述距离信息是否小于预设的距离;
29、若小于,则将对应数量的巡逻机器人调用至当前编组,形成完整的编组巡逻机器人队列;
30、若大于或等于预设的距离,则调整编组内巡逻机器人队列信息。
31、可选地,在本技术实施例所述的巡逻机器人协同违章取证方法中,所述通过巡逻机器人获取车辆行驶视频,对车辆行驶视频进行预处理,得到处理后的车辆行驶视频,包括:
32、获取车辆行驶视频,将车辆行驶视频进行分帧处理,得到单帧图像信息;
33、提取单帧图像信息内的道路边界线信息与车辆边缘信息;
34、将车辆边缘信息与道路边界线信息进行位置识别,分别得到车辆边缘位置信息与道路边界线位置信息;
35、将车辆边缘位置信息与道路边界线位置信息进行距离计算,得到距离信息;
36、判断所述距离信息是否为正;
37、若为正距离,则判定车辆边缘未压道路边界线,车辆正常行驶且未违章;
38、若为负距离,则判定车辆边缘压线,车辆违章,并得到车辆违章信息。
39、可选地,在本技术实施例所述的巡逻机器人协同违章取证方法中,所述获取车辆行驶视频,将车辆行驶视频进行分帧处理,得到单帧图像信息;包括:
40、获取单帧图像信息,提取单帧图像特征;
41、将单帧图像特征与预设的图像特征进行比较,得到特征偏差率;
42、判断所述特征偏差率是否大于或等于预设的特征偏差率阈值;
43、若大于或等于,则生成禁停区域信息,根据禁停区域信息采集禁停区域内的违章车辆图像,并提取违章车辆车牌信息;
44、根据车牌信息调取车主信息,并通过电话提醒车主进行违章挪车;
45、若小于,则判定单帧图像内车辆位置正常。
46、第二方面,本技术实施例提供了一种巡逻机器人协同违章取证系统,该系统包括:存储器及处理器,所述存储器中包括巡逻机器人协同违章取证方法的程序,所述巡逻机器人协同违章取证方法的程序被所述处理器执行时实现以下步骤:
47、通过巡逻机器人获取车辆行驶视频,对车辆行驶视频进行预处理,得到处理后的车辆行驶视频;
48、将处理后的车辆行驶视频进行特征提取,得到车辆行为信息;
49、将车辆行为信息与违章行为信息进行相似度计算,得到违章相似度;
50、判断所述违章相似度是否大于或等于预设的相似度阈值;
51、若大于或等于,则判定车辆违章,并将车辆行为信息输入预设的违章类别模型,生成车辆违章信息;
52、若小于,则判定车辆行驶正常,并将车辆行为信息按照预定的方式进行存储至终端。
53、可选地,在本技术实施例所述的巡逻机器人协同违章取证系统中,所述通过巡逻机器人获取车辆行驶视频,对车辆行驶视频进行预处理,得到处理后的车辆行驶视频,包括:
54、获取巡逻机器人位置信息;
55、根据巡逻机器人位置信息建立巡逻协同模型;
56、根据巡逻协同模型建立多巡逻机器人协同策略;
57、根据多巡逻机器人协同策略建立多巡逻机器人编组,得到编组信息;
58、根据编组信息对多巡逻机器人建立行驶队列信息;
59、多巡逻机器人按照行驶队列信息进行协同行驶采集多个方位的车辆行驶视频;
60、将多个方位的车辆行驶视频进行融合,得到全方位车辆行驶视频。
61、可选地,在本技术实施例所述的巡逻机器人协同违章取证系统中,所述根据编组信息对多巡逻机器人建立行驶队列信息,包括:
62、获取行驶队列信息,根据行驶队列信息生成巡逻机器人编组数量;
63、判断当前编组内巡逻机器人数量是否满足预设的编组数量;
64、若不满足,则生成巡逻机器人数量差值,根据巡逻机器人数量差值生成调用数量;
65、若满足,则获取编组内各个巡逻机器人位置信息,建立位置关系模型;
66、根据位置关系模型建立位置补偿信息;
67、根据位置补偿信息对当前编组内的巡逻机器人进行位置调整。
68、第三方面,本技术实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质中包括巡逻机器人协同违章取证方法程序,所述巡逻机器人协同违章取证方法程序被处理器执行时,实现如上述任一项所述的巡逻机器人协同违章取证方法的步骤。
69、由上可知,本技术实施例提供的一种巡逻机器人协同违章取证方法、系统及介质,通过巡逻机器人获取车辆行驶视频,对车辆行驶视频进行预处理,得到处理后的车辆行驶视频;将处理后的车辆行驶视频进行特征提取,得到车辆行为信息;将车辆行为信息与违章行为信息进行相似度计算,得到违章相似度;判断所述违章相似度是否大于或等于预设的相似度阈值;若大于或等于,则判定车辆违章,并将车辆行为信息输入预设的违章类别模型,生成车辆违章信息;若小于,则判定车辆行驶正常,并将车辆行为信息按照预定的方式进行存储至终端;通过判断车辆行为信息与违章行为信息进行比较,对车辆进行智能违章识别,提高违章识别的智能化的技术。
70、本技术的其他特征和优点将在随后的说明书阐述,并且,本技术的优点可以从说明书中显而易见的进行推断得到,或者通过实施本技术实施例了解。本技术的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!