单目VSLAM的空间尺度恢复方法、装置、设备及介质与流程
本发明涉及辅助驾驶,特别涉及一种单目vslam的空间尺度恢复方法、装置、设备及介质。
背景技术:
1、单目vslam(visual simultaneous localization and mapping,基于视觉的同步建图定位技术)是结合相机参数、相机图像及其特征信息构成的实时建图、定位系统,该系统的配置成本较低,但无法确定图像像素的深度,并且推导、验算的过程中会不可避免的引入误差,因此在相同刻度下,单目vslam的输出结果和实际情况会相差很大的尺度,难以直接应用于如汽车、机器人的导航服务中。
2、为此,如何恢复单目vslam的空间尺度以实现低成本的建图定位是本领域亟待解决的技术问题。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种单目vslam的空间尺度恢复方法、装置、设备及介质,能够恢复单目vslam的空间尺度,其具体方案如下:
2、第一方面,本技术公开了一种单目vslam的空间尺度恢复方法,包括:
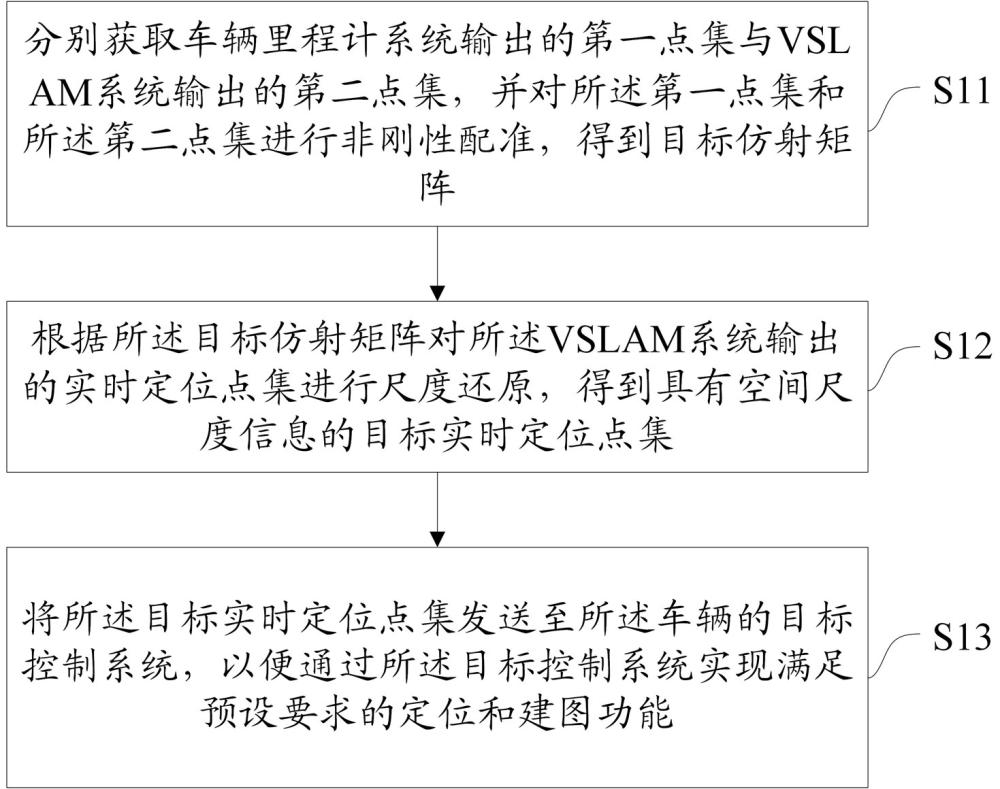
3、分别获取车辆里程计系统输出的第一点集与vslam系统输出的第二点集,并对所述第一点集和所述第二点集进行非刚性配准,得到目标仿射矩阵;
4、根据所述目标仿射矩阵对所述vslam系统输出的实时定位点集进行尺度还原,得到具有空间尺度信息的目标实时定位点集;
5、将所述目标实时定位点集发送至所述车辆的目标控制系统,以便通过所述目标控制系统实现满足预设要求的定位和建图功能。
6、可选的,所述对所述第一点集和所述第二点集进行非刚性配准,得到目标仿射矩阵,包括:
7、根据所述第二点集中的每一坐标的时间戳与所述第一点集中的所有坐标的时间戳的时间戳差值的绝对值构建目标配准矩阵;
8、根据所述目标配准矩阵生成仿射矩阵初始值;其中,所述仿射矩阵初始值包括第一方向初始平移量、第二方向初始平移量、旋转初始角度、第一方向初始拉伸尺度和第二方向初始拉伸尺度;
9、通过所述旋转初始角度与第一预设增量值确定若干个旋转角度,并通过所述第一方向初始拉伸尺度和第二预设增量值确定若干个第一方向拉伸尺度,然后通过所述第二方向初始拉伸尺度和第三预设增量值确定若干个第二方向拉伸尺度;
10、根据所述第一方向初始平移量、所述第二方向初始平移量、若干个所述旋转角度、若干个所述第一方向拉伸尺度和若干个所述第二方向拉伸尺度确定若干个仿射矩阵,并从若干个所述仿射矩阵中确定所述目标仿射矩阵。
11、可选的,所述根据所述第二点集中的每一坐标的时间戳与所述第一点集中的所有坐标的时间戳的时间戳差值的绝对值构建目标配准矩阵,包括:
12、从所述第二点集中的每一坐标的时间戳与所述第一点集中的所有坐标的时间戳的时间戳差值的绝对值中,确定出与所述第二点集中的每一坐标对应的每一时间戳差值的绝对值的最小值;
13、确定与每一时间戳差值的绝对值的最小值对应的所述第一点集中的每一目标坐标,并根据每一所述目标坐标构建所述目标配准矩阵。
14、可选的,所述根据所述目标配准矩阵生成仿射矩阵初始值,包括:
15、根据所述目标配准矩阵中的第一个坐标与所述第二点集中的第一个坐标生成所述第一方向初始平移量和所述第二方向初始平移量;
16、根据所述目标配准矩阵、所述第一方向初始平移量、所述第二方向初始平移量和所述第二点集确定目标映射矩阵,并根据所述目标映射矩阵生成所述旋转初始角度、所述第一方向初始拉伸尺度和所述第二方向初始拉伸尺度。
17、可选的,所述通过所述旋转初始角度与第一预设增量值确定若干个旋转角度,包括:
18、通过所述旋转初始角度与所述第一预设增量值确定第一变化范围,并通过所述第一变化范围以及第一预设变化步长筛选得到若干个所述旋转角度;
19、相应的,所述通过所述第一方向初始拉伸尺度和第二预设增量值确定若干个第一方向拉伸尺度,包括:
20、通过所述第一方向初始拉伸尺度和第二预设增量值确定第二变化范围,并通过所述第二变化范围以及第二预设变化步长筛选得到若干个所述第一方向拉伸尺度;
21、相应的,所述通过所述第二方向初始拉伸尺度和第三预设增量值确定若干个第二方向拉伸尺度,包括:
22、通过所述第二方向初始拉伸尺度和第三预设增量值确定第三变化范围,并通过所述第三变化范围以及第三预设变化步长筛选得到若干个所述第二方向拉伸尺度。
23、可选的,所述从若干个所述仿射矩阵中确定所述目标仿射矩阵,包括:
24、确定与每一所述仿射矩阵对应的优化判据,并从所述优化判据中确定目标优化判据,然后将与所述目标优化判据对应的所述仿射矩阵确定为所述目标仿射矩阵。
25、可选的,所述确定与每一所述仿射矩阵对应的优化判据,并从所述优化判据中确定目标优化判据,包括:
26、基于每一所述仿射矩阵对所述第二点集进行尺度还原,得到与每一所述仿射矩阵对应的目标点集;
27、根据所述目标点集与所述目标配准矩阵中的相应坐标点之间的欧氏距离之和得到与每一所述仿射矩阵对应的所述优化判据;
28、将欧氏距离之和最小的所述优化判据确定为所述目标优化判据。
29、第二方面,本技术公开了一种单目vslam的空间尺度恢复装置,包括:
30、目标仿射矩阵确定模块,用于分别获取车辆里程计系统输出的第一点集与vslam系统输出的第二点集,并对所述第一点集和所述第二点集进行非刚性配准,得到目标仿射矩阵;
31、空间尺度信息还原模块,用于根据所述目标仿射矩阵对所述vslam系统输出的实时定位点集进行尺度还原,得到具有空间尺度信息的目标实时定位点集;
32、车辆控制模块,用于将所述目标实时定位点集发送至所述车辆的目标控制系统,以便通过所述目标控制系统实现满足预设要求的定位和建图功能。
33、第三方面,本技术公开了一种电子设备,包括:
34、存储器,用于保存计算机程序;
35、处理器,用于执行所述计算机程序,以实现前述公开的单目vslam的空间尺度恢复方法。
36、第四方面,本技术公开了一种计算机可读存储介质,用于保存计算机程序;其中,所述计算机程序被处理器执行时实现前述公开的单目vslam的空间尺度恢复方法。
37、可见,本技术提出一种单目vslam的空间尺度恢复方法,包括:分别获取车辆里程计系统输出的第一点集与vslam系统输出的第二点集,并对所述第一点集和所述第二点集进行非刚性配准,得到目标仿射矩阵;根据所述目标仿射矩阵对所述vslam系统输出的实时定位点集进行尺度还原,得到具有空间尺度信息的目标实时定位点集;将所述目标实时定位点集发送至所述车辆的目标控制系统,以便通过所述目标控制系统实现满足预设要求的定位和建图功能。综上可见,由于车辆里程计系统输出的第一点集是具有空间尺度信息的点集,因此本技术基于车辆里程计系统输出的第一点集与vslam系统输出的第二点集的转换关系实现了对单目vslam的空间尺度信息的还原,具体的,本技术通过对车辆里程计系统输出的第一点集与vslam系统输出的第二点集进行非刚性配准,得到目标仿射矩阵,并根据所述目标仿射矩阵对所述vslam系统输出的实时定位点集进行尺度还原,得到具有空间尺度信息的目标实时定位点集,进一步的,本技术将所述目标实时定位点集发送至所述车辆的目标控制系统,以便通过所述目标控制系统实现满足预设要求的低成本定位和建图功能。
- 还没有人留言评论。精彩留言会获得点赞!