一种标定相机外参的方法及系统与流程
本发明涉及一种标定相机外参的方法及系统,属于信息技术、计算机图形学等。
背景技术:
1、三维点云数据能具体描述物体的几何形状和空间位置,但是由于其数据量非常庞大,需要有特定的设备和技术对空间进行扫描才能生成,所以通常难以实时更新,不适用于对某一空间场景进行监控。二维照片由摄像头等设备获取,可以快速地更新,能够对某一空间场景进行监控,但是由于二维照片不包含纵深信息,通常难以根据二维照片判断空间中某个物体的位置或者判断两个物体之间的距离。如果将三维点云数据和二维照片结合起来,计算二维照片中物体在三维点云数据中的位置,则可以实时获取和更新空间场景中,物体的三维信息。为了实现这一点,需要确定相机的参数信息,在三维点云数据中,根据相机参数生成与真实照片对应的图片,从而建立起三维点云数据和二维照片的对应关系。比如在输电通道场景中,在获得输电通道的照片和点云数据之后,如果能找到杆塔和输电线的点云与照片的对应关系,则可以根据该对应关系推测出场景照片中其他物体的位置。
2、然而,相机的参数信息通常无法通过在扫描点云数据的时候获得,通过人工也难以根据二维照片简单判断出相机的准确参数信息。二维照片中通常不包含很多特征明显的物体,即使有一些物体的特征可以准确匹配,由于纵深信息的不确定,通常无法确保空间中其他所有物体都能精确匹配,所以通过自动化的方式也难以获取相机的准确参数信息。
技术实现思路
1、发明目的:针对现有技术中存在的问题与不足,本发明提供一种标定相机外参的方法及系统,解决标定相机参数时遇到的人工成本高和自动化方式难以获取精确结果的问题。
2、技术方案:一种标定相机外参的方法,包括如下步骤:
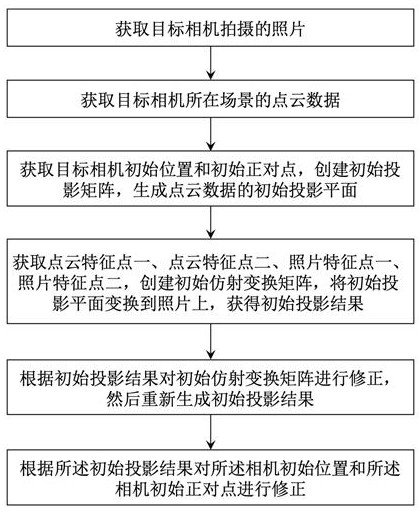
3、步骤1:获取目标相机拍摄的照片,照片中包括输电线和杆塔。
4、步骤2:获取目标相机所在场景的目标点云数据,其中,所述目标相机所在场景包括所述输电线和所述杆塔,所述目标点云数据包括所述输电线点云和所述杆塔点云。
5、步骤3:获取所述目标相机的初始位置和所述目标相机的初始正对点,根据所述目标相机初始正对点和所述目标相机的初始位置创建初始投影矩阵,根据所述初始投影矩阵将点云数据投影到二维平面,获得初始投影平面。
6、步骤4:获取所述杆塔点云上的两个点,作为点云特征点 c1和点云特征点 c2,获取所述目标相机拍摄照片中的两个位置,作为照片特征点 p1和照片特征点 p2。计算所述点云特征点 c1和所述点云特征点 c2在所述初始投影平面的坐标位置,根据点云特征点 c1和点云特征点 c2在初始投影平面的坐标位置以及照片特征点 p1和照片特征点 p2计算所述初始投影屏幕和所述照片之间的初始仿射变换矩阵。
7、步骤5:根据所述初始仿射变换矩阵将所述初始投影平面变换到所述照片中,获得初始投影结果,其中,所述点云特征点 c1在所述初始投影结果中对应的位置与所述照片特征点 p1重合,所述点云特征点 c2在所述初始投影结果中对应的位置与所述照片特征点 p2重合。
8、步骤6:根据初始投影结果对所述初始仿射变换矩阵进行修正,然后重新生成初始投影结果。
9、步骤7:根据所述初始投影结果对所述相机初始位置和所述相机初始正对点进行修正。
10、为实现并优化上述技术方案,采取的具体措施还包括:
11、进一步的,所述获取所述目标相机的初始位置和所述目标相机的初始正对点,包括:
12、步骤301:获取所述输电线点云两端的两个点。
13、步骤302:取目标杆塔处的端点为所述目标相机初始正对点,另一个端点为所述相机的初始位置。
14、进一步的,获取所述杆塔点云上的两个点,作为点云特征点 c1和点云特征点 c2,获取所述目标相机拍摄照片中的两个位置,作为照片特征点 p1和照片特征点 p2,包括:
15、步骤401:选取所述目标相机初始正对点附近(如10米)两个不同的点,分别作为点云特征点 c1和点云特征点 c2。
16、步骤402:选取照片上任意两个点,分别作为照片特征点 p1和照片特征点 p2。
17、进一步的,所述根据初始投影结果对所述初始仿射变换矩阵进行修正,然后重新生成初始投影结果,包括:
18、步骤601:任意选择所述初始投影平面的投影特征点 q1和投影特征点 q2,由人工找到所述投影特征点 q1和所述投影特征点 q2在所述照片中对应的坐标位置,对所述照片特征点 p1和所述照片特征点 p2进行更新。
19、步骤602:根据所述投影特征点 q1和所述投影特征点 q2,和更新后的所述照片特征点 p1和所述照片特征点 p2对所述初始仿射变换矩阵进行更新,并重新生成初始投影结果。
20、步骤603:反向推导所述投影特征点 q1和所述投影特征点 q2在所述点云中的对应位置,对所述点云特征点 c1和所述点云特征点 c2进行更新。
21、进一步的,所述反向推导所述投影特征点 q1和所述投影特征点 q2在所述点云中的对应位置,对所述点云特征点 c1和所述点云特征点 c2进行更新,包括:
22、步骤6031:计算所述点云特征点 c1到所述目标相机初始位置的距离一。
23、步骤6032:获取所述目标相机初始位置和所述投影特征点 q1的连线,在所述连线上,找到相对于所述目标相机位置,与所述投影点一在同一个方向,且到所述目标相机位置与所述距离一相等的点o,将所述点云特征点 c1替换为该点o。
24、步骤6033,对点云特征点 c2重复上面步骤6031-步骤6032两步操作。
25、进一步的,所述根据所述初始投影结果对所述相机初始位置和所述相机初始正对点进行修正,包括:
26、步骤701:在初始投影结果中,所述杆塔点云的投影与所述目标照片中的杆塔重合,由人工判断其他参照物对齐情况,手动调整所述目标相机位置,直到投影与照片完全重合。
27、步骤702:在调整所述目标相机位置的过程中,自动对所述目标相机初始正对点进行调整,使相机正对点的投影一直在照片中心。
28、步骤703:重新生成所述初始投影结果,并按所述初始投影结果对所述相机初始位置和所述相机初始正对点进行修正的步骤进行执行,直到所述初始投影结果满足预设停止条件。
29、进一步的,所述在调整所述目标相机位置的过程中,自动对所述目标相机正对点进行调整,包括:
30、步骤7021:根据所述目标相机位置和所述目标相机正对点,反向推导所述照片中心位置在所述点云中的位置。
31、步骤7022:获取所述目标相机位置和所述照片中心位置在所述点云中的位置的连线,计算所述目标相机正对点在所述连线上的锤点,并用该锤点更新所述目标相机正对点。
32、一种标定相机外参的系统,包括如下模块:
33、模块一:获取目标相机拍摄的照片,照片中包括输电线和杆塔。
34、模块二:获取目标相机所在场景的目标点云数据,其中,所述目标相机所在场景包括所述输电线和所述杆塔,所述目标点云数据包括所述输电线点云和所述杆塔点云。
35、模块三:获取所述目标相机的初始位置和所述目标相机的初始正对点,根据所述目标相机初始正对点和所述目标相机的初始位置创建初始投影矩阵,根据所述初始投影矩阵将点云数据投影到二维平面,获得初始投影平面。
36、模块四:获取所述杆塔点云上的两个点,作为点云特征点 c1和点云特征点 c2,获取所述目标相机拍摄照片中的两个位置,作为照片特征点 p1和照片特征点 p2。计算所述点云特征点 c1和所述点云特征点 c2在所述初始投影平面的坐标位置,根据点云特征点 c1和点云特征点 c2在初始投影平面的坐标位置以及照片特征点 p1和照片特征点 p2计算所述初始投影屏幕和所述照片之间的初始仿射变换矩阵。
37、模块五:根据所述初始仿射变换矩阵将所述初始投影平面变换到所述照片中,获得初始投影结果,其中,所述点云特征点 c1在所述初始投影结果中对应的位置与所述照片特征点 p1重合,所述点云特征点 c2在所述初始投影结果中对应的位置与所述照片特征点 p2重合。
38、模块六:根据初始投影结果对所述初始仿射变换矩阵进行修正,然后重新生成初始投影结果。
39、模块七:根据所述初始投影结果对所述相机初始位置和所述相机初始正对点进行修正。
40、标定相机外参的系统的实现方法和上述方法相同,不再赘述。
41、一种计算机设备,该计算机设备包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行上述计算机程序时实现如上所述的标定相机外参的方法。
42、一种计算机可读存储介质,该计算机可读存储介质存储有执行如上所述的标定相机外参的方法的计算机程序。
43、有益效果:与现有技术相比,本发明能够利用人工根据少量特征进行判断和调整,实现快速且准确的根据二维照片和三维点云数据进行相机外参标定的方法,解决了人工难以简单判断相机准确外参、自动化方式难以精确标定相机外参的问题。
- 还没有人留言评论。精彩留言会获得点赞!