一种基于动态时空细化网络的多船轨迹预测方法及系统
本发明涉及船舶航行安全和导航领域,具体涉及一种基于动态时空细化网络的多船轨迹预测方法及系统。
背景技术:
1、随着全球贸易的不断发展和船舶运输的不断增加,航运业已经成为全球最重要的交通运输方式之一。然而,航运业面临着许多挑战和问题,如海上交通拥堵、船舶碰撞等,这些问题严重威胁到海上交通安全和运输效率。船舶轨迹预测技术可以帮助船舶管理者和海事机构实时监测和管理船舶的运动行为,预测船舶的未来位置和航线,及时发现并解决可能存在的安全隐患和运输问题。此外,船舶轨迹预测技术还可以协助海事机构进行海上监管和资源调度,提高海上交通运输的安全性和效率,减少船舶航行过程中的风险和成本。
2、目前为止,主要的轨迹预测的方法可以分为两种类型:1.基于传统规则的轨迹预测;2、基于深度学习网络的轨迹预测。
3、基于传统规则的方法通常采用物理模型和经验规则来对船舶运动行为进行建模和预测,基于规则的方法通常优点是模型简单可解释;这种方法通常需要对船舶运动学和动力学进行深入的研究,以便根据船舶的运动状态、环境因素和航行任务等因素来预测船舶的未来位置和航线;传统的轨迹预测方法包括基于运动模型和基于概率模型的方法,如高斯混合模型(gaussian mixture module,gmm)(gmm)、卡尔曼滤波(kalman filtering,kf)、贝叶斯网络、动态预测模型和隐马尔科夫模型等;中国专利公开号cn106205213a公开了一种船舶轨迹预测方法,其先对每一采样时刻对船舶轨迹数据聚类,再利用隐马尔科夫模型进行参数训练,然后采用viterbi算法获取当前时刻观测值所对应的隐状态,获取在每一采样时刻滚动推测到未来时段内船舶的轨迹。但传统轨迹预测方法的缺点是模型的预测能力受限于模型的精度和规则的覆盖范围,容易受到数据干扰,在预测长序列时精度较低。
4、随着数据驱动的深度网络技术的不断发展,时间序列问题可以通过分析历史数据得到更好的结果。基于深度学习的船舶轨迹预测方法是一种可以利用历史船舶轨迹数据来预测未来船舶轨迹的方法。中国专利公开号cn113837461a提供一种基于长短期记忆网络(long short-term memory,lstm)网络的船舶轨迹预测方法;中国专利公开号cn114595770a公开了一种船舶轨迹的长时序预测方法,首先利用k-means聚类算法对船舶轨迹数据进行聚类分析,得到多个不同的船舶运动模式集合,然后,通过分析不同船舶运动模式之间的相似性,构建训练集和测试集样本,接下来,使用改进的pix2pix网络模型来对船舶运动轨迹进行预测,并通过迭代训练来不断优化模型的预测能力;中国专利公开号cn115512152a公开了一种了cnn和lstm神经网络组合的船舶轨迹分类方法及系统,其使用cnn-lstm模型对船舶轨迹数据进行处理,通过卷积神经网络提取轨迹数据中的高层次运动属性特征;接着将提取出的特征序列输入到长短时记忆网络中,进行高层次运动行为特征提取和轨迹类型识别;然而,要全面了解复杂轨迹的结构特征和复杂场景下动态运动船舶之间的相互作用特征是一项挑战,同时这些方法的局限性在于,并没有考虑船舶之间的动态影响,没有充分提取时空双重特征因素。
5、智能船舶轨迹预测能够帮助船员和港口管理人员预测船舶的行驶路线和到达时间,从而及时采取措施避免可能的碰撞、搁浅和其他事故,确保航行安全,因此,进行船舶轨迹预测具有重要的实际意义和应用价值。
技术实现思路
1、本发明是为了解决上述问题而进行的,目的在于提供一种基于动态时空细化网络的多船轨迹预测方法及系统。
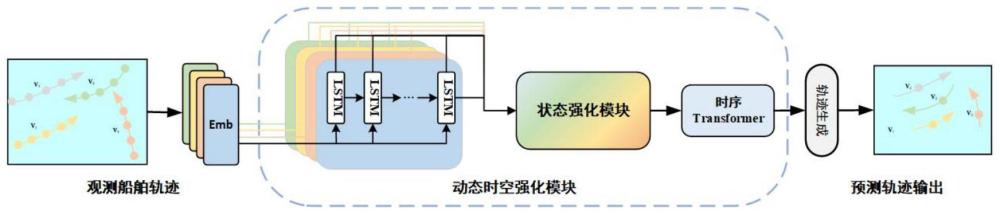
2、本发明提供了一种基于动态时空细化网络的多船轨迹预测方法,具有这样的特征,包括以下步骤:步骤1,获取待预测的海上船舶航行自动识别系统数据;步骤2,对待预测的海上船舶航行自动识别系统数据进行预处理,得到预处理数据;步骤3,将预处理数据进行数据嵌入,得到嵌入数据;步骤4,利用长短期记忆网络对嵌入数据进行特征提取,计算得到轨迹特征;步骤5,基于轨迹特征,构造船舶状态细化参数并对船舶之间的空间位置关系进行量化,得到新的船舶交互细化特征向量;步骤6,将船舶交互细化特征向量输入时空注意力模块进一步学习,得到输出向量;步骤7,将输出向量输入到轨迹生成器中进行船舶轨迹预测,输出三元组向量。
3、在本发明提供的基于动态时空细化网络的多船轨迹预测方法中,还可以具有这样的特征:其中,步骤1中,待预测的海上船舶航行自动识别系统数据包括船舶标识号、船舶经度坐标以及船舶纬度坐标数据。
4、在本发明提供的基于动态时空细化网络的多船轨迹预测方法中,还可以具有这样的特征:其中,步骤2具体包括以下步骤:步骤2-1,对船舶历史自动识别系统数据进行清理,消除数据异常和缺失数据;步骤2-2,采用三次样条插值的方法对自动识别系统数据进行等间隔采样;步骤2-3,将船舶历史自动识别系统数据中的经度和纬度进行归一化操作。
5、在本发明提供的基于动态时空细化网络的多船轨迹预测方法中,还可以具有这样的特征:其中,步骤3中,使用深度嵌入层对预处理好的船舶数据进行编码。
6、在本发明提供的基于动态时空细化网络的多船轨迹预测方法中,还可以具有这样的特征:其中,步骤4中,长短期记忆网络的计算步骤为:步骤4-1,将编码后的历史船舶轨迹信息进行输入门计算,输入门控制当前时间步的船舶轨迹向量对当前时间步的记忆单元的更新程度,通过输入门的权重矩阵wix,wih和偏置bi计算输出值步骤4-2,将编码后的历史船舶轨迹信息进行遗忘门计算,遗忘门控制历史记忆对当前时间步的记忆单元的更新程度,通过遗忘门的权重矩阵wfx,wfh和偏置bf计算输出值步骤4-3,计算候选记忆单元用于计算更新后的记忆单元的值,通过船舶轨迹向量和当前隐藏状态向量计算权重矩阵wαx,wch和偏置bc计算输出值tanh()表示tanh激活函数:步骤4-4,计算更新记忆单元,根据输入门的值和遗忘门的值更新记忆单元的值使用⊙表示逐元素相乘:步骤4-5,将编码后的历史船舶轨迹信息进行输出门计算,输出门控制当前时间步的记忆单元对当前时间步的隐藏状态的更新程度,通过输出门的权重矩阵wox,woh和偏置bi计算输出值步骤4-6,根据输出门的值和更新后的记忆单元的值计算当前时间步的隐藏状态通过⊙表示逐元素相乘:
7、在本发明提供的基于动态时空细化网络的多船轨迹预测方法中,还可以具有这样的特征:其中,步骤5中,使用船舶注意因子参数和船舶运动门参数对船舶间的相互作用关系进行量化,充分学习复杂轨迹的结构特征和复杂场景下船舶之间的空间位置关系,通过隐藏状态向量与船舶运动门向量进行点乘,wmmp为线性变换参数:船舶注意力因子参数进一步量化相邻船舶的重要程度和交互信息,计算步骤为:步骤5-1,船舶注意力因子参数由构成,是相邻船舶i和船舶j之间的轨迹相互作用信息:步骤5-2,由线性训练参数wak与船舶轨迹矩阵的乘积构成,船舶轨迹矩阵包括隐藏状态参数和以及两艘船之间的距离交互信息构成:步骤5-3,两艘船之间的距离交互信息由两艘船舶的经度距离纬度距离以及训练参数wr通过嵌入函数φr()计算得到:
8、在本发明提供的基于动态时空细化网络的多船轨迹预测方法中,还可以具有这样的特征:其中,船舶运动门参数对船舶轨迹数据进行选取相邻船舶的特征,其计算步骤为:式中,δ()为sigmoid函数,wg和bm为网络训练权重和偏置。
9、在本发明提供的基于动态时空细化网络的多船轨迹预测方法中,还可以具有这样的特征:其中,步骤6中,时空注意力模块包括编码器和解码器,编码器通过获取步骤5计算的关于空间上船舶相互作用的信息来提取时间序列,解码器对特征进行细化,用于嵌入和输出表示,时空注意力模块由时序自注意子层和可分离卷积子层组成,计算步骤为:步骤6-1,在时间自注意子层中引入多头自注意机制,由h个head组成,与线性参数wd进行乘积独立计算每个船舶节点的时间维度相关性:multiheadi=wd·concat([headi0…headih]);步骤6-2,可分离卷积子层对权重矩阵进行分解,并与输入向量进行计算,加快运算速度;步骤6-3,将步骤6-1~步骤6-2迭代执行n次后,输出最终的结果向量v。
10、在本发明提供的基于动态时空细化网络的多船轨迹预测方法中,还可以具有这样的特征:其中,步骤7中,轨迹生成器包括2层全连接层,最终输出该区域中未来12个时间步的所有船舶轨迹。
11、本发明提供了一种基于动态时空细化网络的多船轨迹预测系统,具有这样的特征,包括:预处理部,获取待预测的海上船舶航行自动识别系统数据,对待预测的海上船舶航行自动识别系统数据进行预处理,得到预处理数据;目标预测部,将预处理数据进行数据嵌入,得到嵌入数据,利用长短期记忆网络对嵌入数据进行特征提取,计算得到轨迹特征,基于轨迹特征,构造船舶状态细化参数并对船舶之间的空间位置关系进行量化,得到新的船舶交互细化特征向量,将船舶交互细化特征向量输入时空注意力模块进一步学习,得到输出向量,将输出向量输入到轨迹生成器中进行船舶轨迹预测,输出三元组向量。
12、发明的作用与效果
13、根据本发明所涉及的基于动态时空细化网络的多船轨迹预测方法及系统,因为包括:步骤1,获取待预测的海上船舶航行自动识别系统数据;步骤2,对待预测的海上船舶航行自动识别系统数据进行预处理,得到预处理数据;步骤3,将预处理数据进行数据嵌入,得到嵌入数据;步骤4,利用长短期记忆网络对嵌入数据进行特征提取,计算得到轨迹特征;步骤5,基于轨迹特征,构造船舶状态细化参数并对船舶之间的空间位置关系进行量化,得到新的船舶交互细化特征向量;步骤6,将船舶交互细化特征向量输入时空注意力模块进一步学习,得到输出向量;步骤7,将输出向量输入到轨迹生成器中进行船舶轨迹预测,输出三元组向量。
14、因此,本发明将船舶注意因子和船舶运动门系数融入深度神经网络技术,同时考虑船舶之间的时间位置信息,预测相应区域中同一时间内的所有船舶,适用性广,鲁棒性强。
- 还没有人留言评论。精彩留言会获得点赞!