一种智能铣刨机优化控制方法及系统与流程
本发明涉及滤波图像增强,具体涉及一种智能铣刨机优化控制方法及系统。
背景技术:
1、铣刨机是道路养护设备的一种,用于去除道路表面的损坏层,以便进行修复和重新铺设道路。在通过铣刨机进行道路养护时,合理的行进速度能够在保证施工质量的同时提高施工效率;但是道路上不同的区域受到的路面损伤不同,也即路面质量不同,导致不同的路面需要不同的施工时间去保证施工质量;因此为了保证施工质量和施工效率,铣刨机需要在路面质量指数不同的路面上调整不同的行进速度;也即铣刨机需要根据前进路面的质量选择行进速度。
2、考虑到通过图像能够直接清楚的反映前进路面的具体情况,因此通常在铣刨机行进过程中采集路面图像;并将路面图像输入到训练好的深度学习模型中,输出所需要的路面质量,并根据路面质量进行铣刨机行进速度的控制。但是由于铣刨机工作环境和采集设备的影响,铣刨机在行进过程中所采集到的图像会受到噪声干扰,因此为了保证通过深度学习模型输出得到的路面质量的准确性,需要对采集到的路面图像进行去噪预处理。现有技术通常采用非局部均值滤波方法对采集到的路面灰度图像进行滤波处理;但是非局部均值滤波方法对图像的滤波效果受到主观选取的先验参数的影响较大,也即会受到搜索窗口长度和邻域窗口长度的影响;而路面质量状况较为复杂,非局部均值滤波方法中单一先验参数的选取无法保证对路面图像中不同区域的去噪效果,导致得到的路面去噪图像的去噪效果较差,也即现有技术通过非局部均值滤波方法对铣刨机行进过程中前进路面的路面灰度图像的去噪效果较差,使得基于去噪后的路面去噪图像对铣刨机的行进速度进行调整的准确性较低。
技术实现思路
1、为了解决现有技术通过非局部均值滤波方法对铣刨机行进过程中前进路面的路面灰度图像的去噪效果较差,使得基于去噪后的路面去噪图像对铣刨机的行进速度进行优化调整的效果较差的技术问题,本发明的目的在于提供一种智能铣刨机优化控制方法及系统,所采用的技术方案具体如下:
2、本发明提出了一种智能铣刨机优化控制方法,所述方法包括:
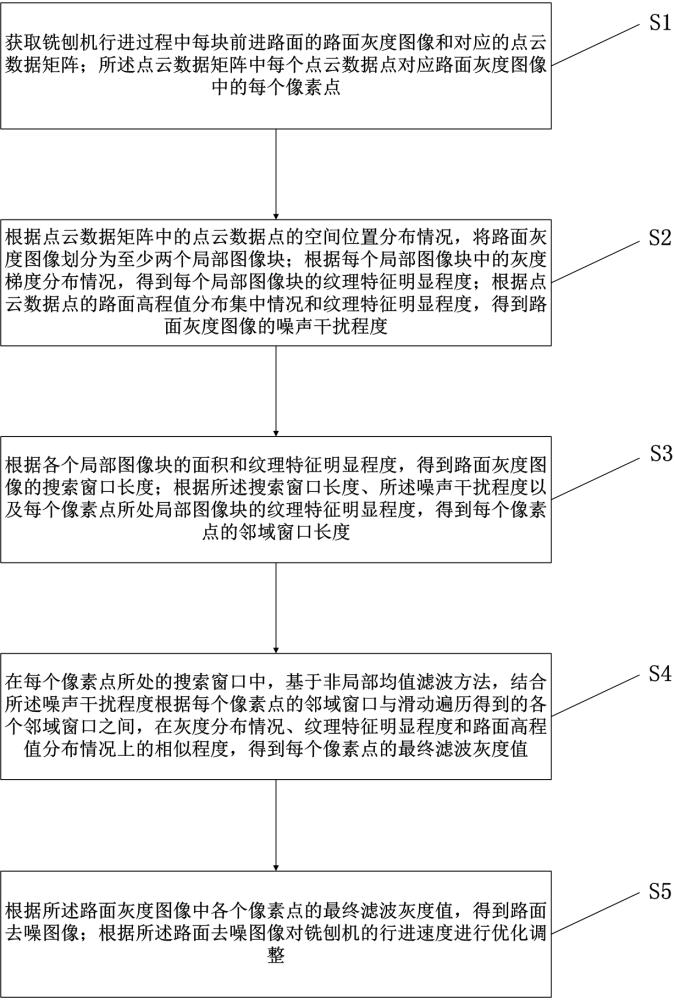
3、获取铣刨机行进过程中每块前进路面的路面灰度图像和对应的点云数据矩阵;所述点云数据矩阵中每个点云数据点对应路面灰度图像中的每个像素点;
4、根据点云数据矩阵中的点云数据点的空间位置分布情况,将所述路面灰度图像划分为至少两个局部图像块;根据每个局部图像块中的灰度梯度分布情况,得到每个局部图像块的纹理特征明显程度;根据点云数据点的路面高程值分布集中情况和所述纹理特征明显程度,得到路面灰度图像的噪声干扰程度;
5、根据各个局部图像块的面积和纹理特征明显程度,得到路面灰度图像的搜索窗口长度;根据所述搜索窗口长度、所述噪声干扰程度以及每个像素点所处局部图像块的纹理特征明显程度,得到每个像素点的邻域窗口长度;
6、在每个像素点所处的搜索窗口中,基于非局部均值滤波方法,结合所述噪声干扰程度根据每个像素点的邻域窗口与滑动遍历得到的各个邻域窗口之间,在灰度分布情况、纹理特征明显程度和路面高程值分布情况上的相似程度,得到每个像素点的最终滤波灰度值;
7、根据所述路面灰度图像中各个像素点的最终滤波灰度值,得到路面去噪图像;根据所述路面去噪图像对铣刨机的行进速度进行优化调整。
8、进一步地,所述局部图像块的获取方法包括:
9、在所述路面灰度图像中,根据点云数据矩阵中的所有点云数据点的像素坐标通过k-means聚类算法进行聚类分析,得到至少两个点云数据点聚类簇;将每个点云数据点聚类簇在所述路面灰度图像中对应的图像区域,作为一个局部图像块。
10、进一步地,所述纹理特征明显程度的获取方法包括:
11、在每个局部图像块中,将每个像素点与所处的局部图像块的质心之间的距离,作为每个像素点的参考距离;
12、将每个像素点的灰度梯度值的归一化值与所述参考距离之间的乘积,作为每个像素点的局部纹理特征值;
13、将每个局部图像块中所有像素点的局部纹理特征值的均值的归一化值,作为每个局部图像块的纹理特征明显程度。
14、进一步地,所述噪声干扰程度的获取方法包括:
15、将每个局部图像块中所有点云数据点的路面高程值的方差的归一化值,作为每个局部图像块的路面损伤程度;根据所述路面损伤程度的负相关映射值与所述纹理特征明显程度的乘积,作为每个局部图像块的纹理特征参数;将所有局部图像块的纹理特征参数的均值,作为路面灰度图像的噪声干扰程度。
16、进一步地,所述搜索窗口长度的获取方法包括:
17、将每个局部图像块的面积的算术平方根与所述纹理特征明显程度的乘积,作为每个局部图像块的参考窗口长度;将所有局部图像块的参考窗口长度的均值向上取奇数整,得到路面灰度图像的搜索窗口长度。
18、进一步地,所述邻域窗口长度的获取方法包括:
19、将所述搜索窗口长度、所述噪声干扰程度与每个像素点所处局部图像块的纹理特征明显程度的乘积向上取奇数整,得到每个像素点的邻域窗口长度。
20、进一步地,所述最终滤波灰度值的获取方法包括:
21、依次将每个像素点作为目标像素点;将目标像素点的搜索窗口作为目标搜索窗口;将以目标像素点为中心的邻域窗口,作为目标邻域窗口;
22、以与目标邻域窗口形状大小相同的滑动窗口遍历所述目标搜索窗口,得到至少两个对比邻域窗口;将每个对比邻域窗口的中心位置对应的像素点,作为对比像素点;将目标邻域窗口中的所有像素点以从左到右从上到下的顺序排列,得到目标邻域窗口的像素点参考序列;将每个对比邻域窗口中的所有像素点以从左到右从上到下的顺序排列,得到每个对比邻域窗口对应的像素点参考序列;
23、以所述噪声干扰程度为权重,根据每个对比邻域窗口与目标邻域窗口之间的像素点参考序列,在灰度分布情况、纹理特征明显程度和路面高程值分布情况上的相似度,构建窗口相似度计算模型;根据窗口相似度计算模型得到每个对比邻域窗口的窗口相似度;
24、将每个对比邻域窗口的窗口相似度与所有对比邻域窗口的窗口相似度的累加值之间的比值,作为每个对比邻域窗口的滤波权重;将所述滤波权重与每个对比邻域窗口的对比像素点的灰度值之间的乘积,作为每个对比邻域窗口的参考加权灰度值;将所有对比邻域窗口的参考加权灰度值的累加值,作为目标像素点的最终滤波灰度值。
25、进一步地,所述根据所述路面去噪图像对铣刨机的行进速度进行优化调整的方法包括:
26、将路面去噪图像输入到训练好的卷积神经网络中,输出铣刨机行进过程中每块前进路面的路面质量指数;根据路面质量指数调整铣刨机的行进速度。
27、进一步地,所述窗口相似度计算模型包括:
28、
29、其中,为目标邻域窗口对应的第个对比邻域窗口的窗口相似度;为路面灰度图像的噪声干扰程度;为目标邻域窗口和第个对比邻域窗口对应的像素点参考序列中的像素点数量;为目标邻域窗口的像素点参考序列中所有像素点的灰度值和第个对比邻域窗口的像素点参考序列中所有像素点的灰度值的均方误差;为目标邻域窗口对应的像素点参考序列中第个像素点所处局部图像块的纹理特征明显程度;为第个对比邻域窗口对应的像素点参考序列中第个像素点所处局部图像块的纹理特征明显程度;为目标邻域窗口对应的像素点参考序列中第个像素点对应的点云数据点的路面高程值;为第个对比邻域窗口对应的像素点参考序列中第个像素点对应的点云数据点的路面高程值;为最大值选取函数。
30、本发明还提出了一种智能铣刨机优化控制系统,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,处理器执行所述计算机程序时实现任意一项一种智能铣刨机优化控制方法的步骤。
31、本发明具有如下有益效果:
32、根据非局部均值滤波方法的滤波原理,搜索窗口大小和邻域窗口大小的不同,会影响被滤波处理的图像的平滑效果和去噪效果;而路面质量的复杂性会导致路面灰度图像不同区域的纹理细节不同,并且不同的路面灰度图像受到噪声的影响也不同,导致所需要的平滑效果和去噪效果不同,因此若要保证非局部均值滤波的效果,则对不同区域的像素点进行滤波灰度值计算时,需要根据对应图像区域的纹理细节以及图像整体受到噪声的影响程度,设定不同大小的搜索窗口和邻域窗口;也即首先需要计算路面灰度图像的噪声干扰程度以及不同图像区域的纹理细节特征。
33、对于没有路面损伤的正常路面而言,对应的路面灰度图像相对低频均匀,在受到噪声干扰的情况下,图像中会出现部分高频区域;因此对于正常路面,通过统计图像中高频部分的占比即可衡量图像受噪声干扰的程度;也即对于属于正常路面的局部图像块而言,对应的纹理特征明显程度是由于噪声的干扰产生的,通过对应的纹理特征明显程度即可进行噪声干扰程度的计算。但是对于存在路面损伤的路面灰度图像而言,由于路面损伤区域对应的路面表面是凹凸不平的,出现阴影纹理的区域相对较多,导致对应的路面损伤区域也表现为高频;因此对于属于路面损伤区域的局部图像块,对应的路面损伤越严重,则通过纹理特征明显程度进行噪声干扰程度表征的可信度越低;因此在衡量图像受到噪声干扰的影响程度时,需要区分不同区域的纹理特征明显程度进行分析。
34、要计算不同图像区域的纹理细节特征,首先需要进行图像区域的划分;由于不同损伤程度的路面区域进行噪声干扰的衡量不同,并且路面损伤反映在点云数据矩阵中表现为点云数据点的空间位置分布,例如凹凸不同的路面会导致不同的点云数据点的高度受到影响,因此若基于点云数据点的空间位置进行聚类,并由于每个点云数据点对应一个像素点的特征,即根据聚类结果进行图像块的划分,使得划分出的图像块具有不同的纹理细节特征,也即损伤程度不同。因此本发明根据点云数据矩阵中的点云数据点的空间位置分布情况,将路面灰度图像划分为至少两个局部图像块;进一步地计算每个局部图像块的纹理细节特征。
35、在路面灰度图像中,噪声像素点的分布是随机的,但是正常的图像纹理通常表示路面纹理或路面损伤区域,像素点位置较为集中;因此图像分块中具有梯度的像素点的位置分布越离散,且梯度特征越明显,则说明针对噪声分析的分块纹理特征越明显;因此对于每个局部图像块而言,可通过每个图像块中的灰度梯度分布情况,进行纹理细节特征的衡量,并且方便后续进行噪声影响程度的计算。因此本发明根据每个局部图像块中的灰度梯度分布情况,得到每个局部图像块的纹理特征明显程度;从而结合局部图像块的纹理特征明显程度进行噪声干扰程度的计算。
36、对于每个局部图像块而言,其对应的路面损伤程度不同,路面损伤程度越低的区域在不考虑噪声影响时对应的真实纹理越少,则计算出的纹理特征明显程度表征受到噪声的干扰程度的可信度越高;而路面损伤程度越高的区域,其不受噪声影响时对应的纹理越对多,则计算出的纹理特征明显程度表征受到噪声的干扰可信度就越低;因此可以通过每个局部图像块的路面损伤程度对纹理特征明显程度进行加权,来进一步地进行噪声干扰程度的计算。对于每个局部图像块,对应的路面越平缓,则损伤程度通常越小,也即其中的点云数据点整体的路面高程值整体的差异较小;反之,路面越凹凸不平,则损伤程度通常越大,也即其中的点云数据点整体的路面高程值整体的差异越大;所以可根据路面高程值整体差异作为纹理特征明显程度的可信度进行加权,进行噪声干扰程度的计算;因此本发明根据点云数据点的路面高程值分布集中情况和纹理特征明显程度,得到路面灰度图像的噪声干扰程度。
37、进一步地需要根据噪声干扰程度和纹理特征明显程度进行邻域窗口长度和搜索窗口长度的计算;由于同一个局部图像块表示路面高程值类似的区域,因此若搜索窗口尽可能的包含图像的同一个局部图像块时,能够使得其中的在邻域窗口在对比的过程中更具参考性;所以本发明通过结合各个局部图像块的面积进行搜索窗口长度的计算。此外,由于纹理越复杂的邻域窗口需要越多的图像信息进行比对,以提升滤波的准确率;因此本发明在局部图像块面积的基础上,结合纹理特征明显程度,进行搜索窗口长度的计算。进一步地在计算邻域窗口长度时,需要考虑到当噪声干扰越强,且纹理特征越明显时,对应的像素点需要细节更多的邻域窗口进行对比计算,从而获取更为理想的降噪效果;并且考虑到邻域窗口需要限制在搜索窗口中,因此本发明根据搜索窗口长度、噪声干扰程度以及每个像素点所处局部图像块的纹理特征明显程度,得到每个像素点的邻域窗口长度。
38、在得到搜索窗口长度和邻域窗口长度后,进一步地需要结合非局部均值滤波对每个像素点进行最终滤波灰度值的自适应计算;根据非局部均值滤波算法的原理,需要计算每个像素点的邻域窗口与对应的搜索窗口中各个邻域窗口之间进行相似度计算;传统的相似度计算方法为计算邻域窗口之间在灰度上的均方误差;但是对于铣刨机处理的路面损伤图像而言,不同的损伤区域通常表现为不同的图像特征,例如正常路面区域与损伤路面区域相比具有较少的纹理信息,但是由于噪声的随机分布性,在正常路面中的噪声点相对密集区域进行相似度对比会使得损伤区域的权重提升,导致滤波结果不准确。当图像受到噪声干扰较小时,传统的基于均方误差的相似度衡量方法,确实能够得到相对理想的计算结果;但是当图像受到噪声的干扰较大时,根据邻域窗口长度的计算方法,其对应的邻域窗口中会出现不同局部图像块的像素点;且不同的图像块均受到了较大的噪声影响,导致被计算的像素点的邻域窗口的图像特征可能更接近于其他图像块,间接提高了不属于同一个局部图像块的邻域窗口的相似度权重,从而影响相似度衡量的准确性;由于同一个局部图像块中的高程值较为接近,因此为了降低不属于同一个局部图像块的邻域窗口的相似度权重;在噪声干扰较大的情况下,相似度的衡量指标应该更偏向高程值类似的区域;因此结合上述特点,本发明在每个像素点所处的搜索窗口中,基于非局部均值滤波方法,结合所述噪声干扰程度根据每个像素点的邻域窗口与滑动遍历得到的各个邻域窗口之间,在灰度分布情况、纹理特征明显程度和路面高程值分布情况上的相似程度,得到每个像素点对应的更加准确的最终滤波灰度值。从而进一步地根据最终滤波灰度值得到去噪效果更好的路面去噪图像,使得基于路面去噪图像对铣刨机的行进速度进行更加准确的优化调整。
- 还没有人留言评论。精彩留言会获得点赞!