智能物流方法及其智能储物设备与流程
1.本发明涉及一种物流方法,尤其涉及一种用于智能物流系统的智能物流方法,并进一步涉及用于该所述智能物流方法的智能储物设备,所述智能储物设备可以安装于载具,且本发明尤其指一种可确保货品完整性(integrity)的用于智能物流系统的智能储物设备及使用其的智能物流方法,智能储物设备可将商家用户(例如,货品卖方)的货品于输送过程中独立地固定于载具的承载部并直到抵达目的地才能卸除货品。
背景技术:
2.随着网络生活化,网络购物对人类的生活而言,几乎已密不可分。各类型的网络购物平台、模式与物流配送纷纷兴起,其中除了普遍的货物物流以外,还包括生鲜食材与熟食餐饮的配送。
3.现行多数的陆上物流配送大致采用两种载具:机车或货车,通常会因应货品尺寸、货品数量和运送距离而选择较佳的运送方法。不管是哪种载具,一般都是外勤人员拿到货品后将货品置于配送车上的置物箱或置物柜内,有时是随机摆放,有时是根据目的地的远近摆放,然后到目的地后再将货品取出。然而,当外勤人员沿途拿货收货、取货送货时,除了拿错货品的可能性,找货品时移动其他货品也会增加损坏货品内容物的机率。
4.再者,现行多数的配送车上的置物箱或置物柜仅是单一个可容纳货品的空间,偶尔设有层架可将货品分层摆放,但没有固定货品的设计,因此货品在运送过程可能会因为路况而产生位移及碰撞,导致货品内容物的损坏。除此之外,于运送过程中,多半无法知悉货品是否被外勤人员使用或窃取,故当货品未顺利交送到买方手上或交至买方手上的货品有瑕疵时,此将造成了货品买卖上的纠纷。
技术实现要素:
5.因此,为了克服现有技术的不足,本发明实施例提供一种用于智能物流系统的智能物流方法及其智能储物设备,所述智能储物设备可以安装于载具。所述用于智能物流系统的智能储物设备具有基座装置以及至少一个物流容器,其中物流容器可装载货品并被收纳于基座装置的容器收纳结构,而所述智能物流方法使基座装置的容器收纳结构进一步取得物流容器的识别信息并锁付物流容器于其中。再者,基座装置具有取盒控制单元,所述智能物流方法使取盒控制单元用以根据服务器的退盒信息控制基座装置中对应的容器收纳结构对其与物流容器之间的锁付进行解锁。所述用于智能物流系统的智能储物设备与使用其的智能物流方法可将商家用户(例如,货品卖方)的货品于输送过程中独立地固定于载具的承载部,直到抵达目的地才能卸除货品,以藉此确保货品的完整性。再者,各个物流容器分别锁付于基座装置中特定位置的容器收纳结构中,其解锁与否的根据是退盒信息,如此,可减少配送员拿错货品的可能性,以及降低货品内容物因位移碰撞产生的损坏。
6.基于前述目的的至少其中之一者,本发明提供过一种用于智能物流系统的智能物流方法,其步骤如下。所述智能物流方法提供可安装于载具的智能储物设备,所述智能储物
设备包括基座装置以及至少一个物流容器。所述基座装置包括基座本体、通讯单元以及取盒控制单元,其中基座本体具有至少两个容器收纳结构,且通讯单元与取盒控制单元设置于基座本体,其中至少两个容器收纳结构的每一者设置有容器锁件与识别控制单元,识别控制单元通讯或电性连接取盒控制单元,取盒控制单元通讯连接通讯单元,且通讯单元通信连接至服务器。所述物流容器包括容器本体,其中容器本体具有识别信息,且设置有对应于容器锁件的基座锁件。当物流容器被收纳于容器收纳结构时,所述智能物流方法使识别控制单元感应判读物流容器的识别信息并进行容器锁件与基座锁件之间的锁付。当物流容器锁付于容器收纳结构时,所述智能物流方法使取盒控制单元根据服务器的退盒信息控制容器锁件与基座锁件之间是否解锁。所述锁付为与所述解锁相对应的锁住连接。
7.基于前述目的的至少其中之一者,本发明提供的可安装于载具的智能储物设备包括基座装置以及至少一个物流容器。所述基座装置包括基座本体、通讯单元以及取盒控制单元,其中基座本体具有至少两个容器收纳结构,且通讯单元与取盒控制单元设置于基座本体,其中至少两个容器收纳结构的每一者设置有容器锁件与识别控制单元,识别控制单元通讯或电性连接取盒控制单元,取盒控制单元通讯连接通讯单元,且通讯单元通信连接至服务器。所述物流容器包括容器本体,其中容器本体具有识别信息,且设置有对应于容器锁件的基座锁件。当物流容器被收纳于容器收纳结构时,识别控制单元感应判读物流容器的识别信息并进行容器锁件与基座锁件之间的锁付。当物流容器锁付于容器收纳结构时,取盒控制单元根据服务器的退盒信息控制容器锁件与基座锁件之间是否解锁。
8.可选地,所述退盒信息包括需解锁的物流容器的信息,所述取盒控制单元根据所述退盒信息产生退盒讯号到各对应收纳需解锁的物流容器于其中的容器收纳结构的辨识控制单元,以便控制辨识控制单元解除对应的容器锁件与基座锁件之间的锁付。
9.可选地,所述取盒控制单元还设置有一取盒按钮,外勤用户通过触碰取盒按钮以产生退盒讯号对对应所述退盒信息的物流容器解锁,以便拿取物流容器。
10.可选地,所述基座本体还包括至少一个仓储模块用以设置容器收纳结构,且所述仓储模块固定于所述基座本体上,或可相对所述基座本体转动或滑动地设于所述基座本体上。
11.可选地,所述智能储物设备还包括取盒机构,所述取盒机构可移动地设于所述基座本体周围,并面向容器收纳结构收纳物流容器的一面,所述取盒机构还电性连接或通讯连接所述取盒控制单元,其中取盒控制单元根据退盒信息控制取盒机构拿取已解锁的物流容器。
12.可选地,所述取盒机构设有集装箱,其中取盒机构拿取已解锁的物流容器并放置于集装箱中以便外勤用户拿取,当外勤用户放置新的物流容器于所述集装箱中时,取盒控制单元控制取盒机构拿取新的物流容器并放置到基座本体内空的容器收纳结构中。
13.可选地,所述取盒控制单元根据服务器的收货信息控制取盒机构放置已解锁的物流容器于定点储物设备中。
14.可选地,所述取盒控制单元根据服务器的收货信息控制所述取盒机构由定点储物设备拿取新的物流容器并放置新的物流容器于基座本体内空的容器收纳结构中。
15.可选地,所述容器收纳结构还设置有标示单元,标示单元电性连接所述辨识控制单元,所述辨识控制单元根据退盒讯号启动标示单元,以供外勤用户辨识已解锁的物流容
器。
16.可选地,所述载具为机车、客车、货车、无人机、船、飞机或任何可以安装智能储物设备移动的交通工具。
17.可选地,当所述智能储存设备具有取盒机构且所述载具停靠于定点储物设备时,所述取盒控制单元根据服务器的收货信息驱动取盒机构的智能识别定位模块辨识收货信息,以知悉新的物流容器位于定点储物设备的位置,并使所述取盒控制单元控制取盒机构由定点储物设备拿取新的物流容器。
18.可选地,所述载具包括第一电子装置,所述第一电子装置讯号连接服务器,当已解锁的物流容器置入定点储物设备后,所述取盒控制单元通过通讯单元发送完成信号给服务器,以使服务器发送完成通知给第一电子装置。
19.本发明还提供一种用于智能物流系统的智能储物设备,所述智能储物设备可安装于载具,且包括:基座装置,包括基座本体、通讯单元以及取盒控制单元,所述基座本体具有至少两个容器收纳结构,且所述通讯单元与所述取盒控制单元设置于所述基座本体,其中所至少两个等容器收纳结构的每一者设置有容器锁件与识别控制单元,所述识别控制单元通讯或电性连接所述取盒控制单元,所述取盒控制单元通讯连接所述通讯单元,且所述通讯单元通信连接至服务器;以及,至少一个物流容器,包括容器本体,其中所述容器本体具有识别信息,且设置有对应于所述容器锁件的基座锁件;其中当所述物流容器被收纳于所述容器收纳结构时,所述识别控制单元感应判读所述物流容器的识别信息并进行所述容器锁件与所述基座锁件之间的锁付,而当所述物流容器锁付于所述容器收纳结构时,所述取盒控制单元根据所述服务器的退盒信息控制所述容器锁件与所述基座锁件之间是否解锁。
20.本发明所述智能储物设备为用于上述智能物流方法中的智能储物设备,所述智能储物设备和智能物流方法均应用于智能物流系统中。
21.简言之,本发明提供了用于智能物流系统的智能物流方法及其智能储物设备,可减少物流公司的外勤用户在收货送货时误拿货品的可能性,尤其是经由自动识别物流容器可节省理货找货的时间,提高物流效率并节省物流成本,且通过容器收纳结构与物流容器的锁付可降低物流容器内的货品内容物因位移碰撞而损坏的机率,以及降低货品被外勤用户窃取或使用的机率,故于对物流系统有需求的各种市场(例如商家、餐饮业、物流公司等)具有优势。
22.为让本发明的上述和其他目的、特征及优点能更明显易懂,配合所附图示,做详细说明如下。
附图说明
23.图1是本发明的智能物流系统的智能储物设备的侧视示意图;图2是本发明的智能物流系统的智能储物设备的物流容器的立体示意图;图3是本发明的智能物流系统的智能储物设备的物流容器的后视示意图;图4是本发明的智能物流系统的讯号连接至示意图;图5是本发明的智能物流方法中智能储物设备解锁的流程图;图6本发明第一实施例的智能物流系统的智能储物设备的俯视示意图;图7是本发明第一实施例的智能物流方法中收货送货流程图;
图8是本发明第二实施例的智能物流系统的智能储物设备的侧视示意图;图9是本发明第二实施例的智能物流系统的智能储物设备的俯视示意图;图10是本发明第二实施例的智能物流系统的讯号连接至示意图;图11 是本发明第二实施例的智能物流系统的集装箱的示意图;图12是本发明第二实施例的智能物流方法中收货送货的流程图;图13是本发明第三实施例的智能物流系统的智能储物设备的侧视示意图;图14 是本发明第三实施例的智能物流系统的智能储物设备的俯视示意图;图15是本发明三实施例的智能物流方法中收货送货的流程图。
24.其中,附图标记:1:基座装置;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
101:容器收纳结构;102:容器锁件;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
103:识别控制单元;104:通讯单元;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
105:取盒控制单元;1051:取盒按钮;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
106:基座本体;107:标示单元;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
108:仓储模块;109:仓储模块;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
110:仓储模块;111:滑轨;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
112:转轴;2:物流容器;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
201:条形码;202:基座锁件;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
203:收发控制单元;204:旋转结构;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
205:夹取结构;206:容器本体;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
207:盖体3:服务器;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4:取盒机构;401:集装箱;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
402:上轨道;403:下轨道;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
404:移动本体;405:夹取模块;ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ406:夹取单元;407:升降架;ꢀꢀꢀꢀꢀꢀꢀꢀꢀ408:旋转单元;409:智能识别定位模块;ꢀꢀꢀꢀꢀꢀ410:移动机构;5:载具;ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ501:第一电子装置;502:承载部;ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ503:驾驶座。
具体实施方式
25.为充分了解本发明的目的、特征及功效,兹藉由下述具体的实施例,并配合所附的图式,对本发明做一详细说明,说明如后。
26.本实施例提供一种用于智能物流系统的智能物流方法及其智能储物设备。所述用于智能物流系统的智能储物设备包括基座装置与至少一个物流容器。当商家用户(例如,商家)根据消费用户的订单将货品(例如,物品或食品)放置到物流容器后,外勤用户(例如,物流业者的送货员)将物流容器收纳于基座装置的容器收纳结构,以便将物流容器送达消费用户指定的定点储物设备。进一步地,容器收纳结构感应判读物流容器的辨识信息并进行锁付动作,使物流容器可在运输过程中锁付于容器收纳结构。接着,在外勤用户抵达定点储物设备时,服务器传送退盒信息给基座装置,基座装置根据退盒信息解除目的地为此定点
储物设备的物流容器的锁付,以便外勤用户将物流容器移出容器收纳结构并置入定点储物设备。本发明实施例将以手动、半自动以及自动的模式进行物品的配送为例进行说明,但本发明不以物流的配送模式的类型为限制。所述用于智能物流系统的智能储物设备可节省商家用户因货品内容物损坏而产生的额外花费。再者,由于智能储物设备设有至少两个容器收纳结构与物流容器,且每个物流容器拥有独立的识别信息及收纳空间,因此可确保货品在对的地点卸下让消费用户取货,因此,本发明所述的用于智能物流系统的智能储物设备有取代现行物流载具上的运送柜的潜力,并减少外勤用户送货时拿取货品的时间。所述外勤用户包括配送员和外送员等。
27.首先,请参照图1、图2与图3,图1是本发明实施例的智能储物设备的侧视示意图,图2是本发明实施例的智能储物设备的物流容器的立体示意图,以及图3是本发明实施例的智能储物设备的物流容器的后视示意图(从图2右侧往左侧看的后视示意图)。如图1所示,智能储物设备的基座装置1包括基座本体106以及至少两个容器收纳结构101,其中于基座本体106设置有通讯单元104与取盒控制单元105,以及容器收纳结构101的每一者设置有容器锁件102、识别控制单元103以及标示单元107,其中标示单元107设于容器收纳结构101的外侧,让外勤用户可清楚辨识启动后的标示单元107。如图2与图3所示,智能储物设备的物流容器2包括容器本体206、基座锁件202、收发控制单元203以及携带识别信息的条形码201(例如为二维条形码,条形码201非必要组件,识别信息可以通过无线射频技术、近场通讯技术或其他方式被读取)。物流容器2为中空的,并具有容置空间与可打开的盖体207,以让商家用户(例如,商家)根据消费用户的订单将货品(例如,物品或食品)放置到物流容器2。容器本体206具有夹取结构205和旋转结构204以便拿取物流容器2,夹取结构205和旋转结构204例如是凹槽,且凹槽可以设于容器本体206的两侧和底面,但本发明不依此限定。当物流容器2被收纳于基座本体106的容器收纳结构101时,所述容器收纳结构101的识别控制单元103感应到物流容器2的条形码201,在读取其识别信息后控制容器收纳结构101的容器锁件102与物流容器2的基座锁件202对应地锁付。容器收纳结构101的容器锁件102与物流容器2的基座锁件202的其中一者为金属件,且容器收纳结构101的容器锁件102与物流容器2的基座锁件202的其中另一者为电磁铁,但本发明不以此为限制,其彼此亦可以是彼此对应的锁件结构,且其中一者或两者可以被电致驱动以进行锁付与解锁。于其他实施例中,物流容器2的识别信息可以是由物流容器2的收发控制单元203传送给容器收纳结构101的识别控制单元103,本发明不以此为限制。
28.图1更揭示了乘载所述智能储物设备的载具5,以便运送物流容器2由发出地到目的地。载具5可以是机车、客车、货车、无人机、船、飞机或任何可以运送物品的交通工具,本发明实施利并不依此限定。载具5包含第一电子装置501和承载部502,其中第一电子装置501设置在或位于载具50的驾驶座503内,而智能储物设备的基座装置1则设置在承载部502上(例如,机车后座的货物架或货车的货柜中)。
29.另外,物流容器2可以是具有保温功能的物流容器,以确保物流容器中的货品的新鲜度,前述保温功能包括保热与/或保冷功能,且本发明不以物流容器2是否具有保温功能为必要限制。再者,物流容器2可以设有可更换或可充电的电池,以获取电力,或者,物流容器2不设有电池,但具有目前能近场进行无线感应并获取电力的感应电路,且本发明不以物流容器2获取电力的方式为限制。
30.接着,请参照图4,所述智能物流系统包括智能储物设备(包括基座装置1与物流容器2)以及服务器3,其中基座装置1中的通讯单元104与取盒控制单元105彼此通讯连接,基座装置1中的取盒控制单元105与识别控制单元103彼此通讯或电性连接,基座装置1中的识别控制单元103与物流容器2的收发控制单元203彼此通讯连接,以及基座装置1中的通讯单元104与服务器3彼此通讯连接。再者,当外勤用户(例如配送员)通过第一电子装置301使用智能储物系统时,第一电子装置301与服务器3通讯连接。
31.于上述实施例中,本发明的智能储物设备的硬设备以及其与服务器之间的连接方式已被描述,接着,将进一步地说明使用智能物流系统的方法与细节。请参照图5,图5是本发明实施例的智能物流方法中智能储物设备的解锁流程图。如步骤s401所示,外勤用户开着承载基座装置与物流容器的载具前往下一个停靠点 (例如但不限定为商家用户地点或定点储物设备地点)。载具行驶时,物流容器收纳于基座装置的容器收纳结构且锁付于其中,确保物流容器不会于运送途中位移,减少货品碰撞损坏的机率。在前往停靠点的途中或抵达停靠点时,如步骤s402所示,服务器传送退盒信息给基座装置的通讯单元,其中退盒信息包括目的地为正在前往的停靠点(或目前的停靠点)所以需要解锁的物流容器的信息,而退盒信息可以是已整合所有需退盒的物流容器信息于其中(服务器传送一次退盒信息即可),或是仅具有个别需退盒的物流容器信息(服务器可能须传送多次退盒信息),本发明不限制退盒信息的内容及数量,与服务器是传送退盒信息的次数是一次或多次。接着,如步骤s403所示,通讯单元把收到的退盒信息传送给基座装置的取盒控制单元。进一步地,如步骤s404所示,取盒控制单元根据收到的退盒信息产生退盒讯号,然后将退盒讯号发送到对应的容器收纳结构的识别控制单元,其中对应的容器收纳结构为收纳目的地为下一个停靠站(也可以是正在前往的停靠站或目前已到达的停靠站)的物流容器的容器收纳结构。取盒控制单元可通过退盒信息锁定对应的容器收纳结构,例如但不限定,退盒信息中包括收纳物流容器的容器收纳结构数据。于其他实施例中,取盒控制单元可根据退盒信息提供的需退盒的物流容器的辨识信息比对容器收纳结构中的物流容器的辨识信息,以便发送退盒讯号,但本发明不以此限制。在识别控制单元收到退盒讯号后,如步骤s405所示,识别控制单元启动容器收纳结构的标示单元并解除容器收纳结构的容器锁件与物流容器的基座锁件之间的锁付,解锁物流容器。于此,其标示单元被启动的容器收纳结构所收纳的物流容器不再锁付于其中,亦即,启动的标示单元标示了解锁的物流容器,降低误拿货品的可能性。
32.当外勤用户驾驶载具抵达停靠点后,将物流容器卸下载具的方式有三种:手动、半自动与全自动,以下将分别说明采用这三种方式拿取物流容器的流程与其所用的智能储物设备的架构。
33.请参照图6,图6是本发明第一实施例的智能物流系统的智能储物设备的俯视示意图,可于手动卸货时采用。基座装置1的基座本体106包括至少两个仓储模块108、109、110,而至少两个容器收纳结构101设置于各个仓储模块108、109、110。仓储模块108为固定式模块,固设于基座本体106,不能移动。仓储模块109为滑动式模块,可在设于基座本体106或载具502的滑轨111上滑动,相对基座本体106移动。仓储模块110为转动式模块,具有转轴112固定于基座本体106或载具502,可相对基座本体106转动。多种不同仓储模块108、109、110的组合可增加容器收纳结构101于一载具上的数量,也可让外勤用户轻易的找到容器收纳结构101以便拿取物流容器2。
34.另外,取盒控制单元105 设有取盒按钮1051控制退盒讯号的发送,外勤用户可依此控制解锁物流容器的时间点。
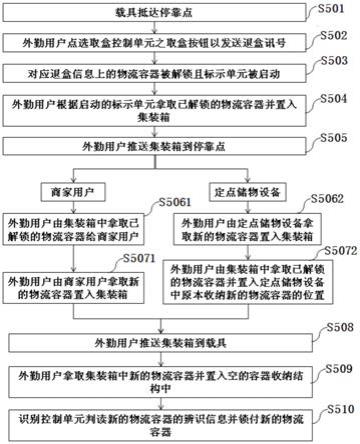
35.接着请参照图7,图7是本发明第一实施例的智能物流方法中收货送货流程图。首先,于步骤s501中,外勤用户驾驶载具抵达停靠点,其中停靠点可以是商家用户或是定点储物设备,本发明不依此限制。于步骤s502,外勤用户触碰盒控制单元上的取盒按钮,取盒控制单元进而产生退盒讯号并发送到对应的容器收纳结构的识别控制单元,然后于下一步骤s503中,收到退盒讯号的识别控制单元解锁对应的物流容器并启动其容器收纳结构的标示单元。辨识对应的容器收纳结构与解锁的方法已详述于上(图4),因此不再赘述。于步骤s504中,外勤用户根据启动的标示单元可以清楚地得知须要拿取哪一个物流容器并将已解锁的物流容器置入集装箱,其中集装箱可以是任何有空间可以暂放物流容器的箱子,主要是中转卸下的物流容器。而外勤用户在拿取完目的地为此停靠站的物流容器后,把集装箱推送到停靠点(步骤s505)。
36.当停靠点是商家用户的时候,外勤用户把集装箱中的已解锁的物流容器拿给商家用户(步骤s5061),而如果商家用户有新的物流容器交给外勤用户的话,外勤用户于步骤s5071把新拿到的物流容器放在集装箱中。一般而言,外勤用户交给商家用户的物流容器(已解锁的物流容器)是空的,而商家用户交给外勤用户的物流容器(新的物流容器)则是有装载货品的,然而本发明不依此限制。
37.当停靠点是定点储物设备的时候,如果定点储物设备是满的(亦即,没有空的收纳空间可放置其他物流容器),外勤用户由定点储物设备拿取新的物流容器并放在集装箱中(步骤s5062)。接着,于步骤s5072,外勤用户把集装箱中的已解锁的物流容器放在定点储物设备中原本收纳新的物流容器的位置。一般而言,外勤用户由定点储物设备拿取的物流容器(新的物流容器)是空的,而外勤用户置入定点储物设备的物流容器(已解锁的物流容器)则是有装载货品的,然而本发明不依此限制。另外,如果定点储物设备不是满的,则步骤s5062可以选择性被执行,且于步骤s5072中,外勤用户把集装箱中的已解锁的物流容器放在定点储物设备中任一个空的位置。
38.外勤用户在分完集装箱中的已解锁的物流容器后,于步骤s508中把集装箱推送到载具处,并接着于步骤s509,把集装箱中新的物流容器拿取出来并置入空的容器收纳结构中。于步骤s510,当新的物流容器被置入容器收纳结构时,容器收纳结构的识别控制单元感应到新的物流容器的识别信息并将其锁付其中。详细地说,在识别控制单元读取新的物流容器的识别信息后,其控制容器收纳结构的容器锁件与物流容器的基座锁件对应地锁付。一般而言,每个停靠点会卸下到达目的地的已解锁的物流容器和装上新的物流容器,但也可能仅是卸下或仅是装上物流容器,本发明不依此限定,例如集装箱中也有可能没有收到新的物流容器可装上载具。
39.请参照图8与图9,分别是本发明第二实施例的智能物流系统的智能储物设备的侧视示意图与俯视示意图,可于半自动卸货时采用。智能储物设备包括取盒机构4可移动的设于基座装置1的基座本体106周围,面向仓储模块108中容器收纳结构101收纳物流容器2的一面。取盒机构4包括分别固设于基座本体106上方与下方的上轨道402和下轨道403,和滑设于上下轨道402、403之间的移动机构410,其中移动机构410可通过上轨道402和下轨道403而沿着基座本体106做横向的移动。移动机构410设有移动本体404和夹取模块405。移动
本体404为一方型框架,其上顶架与下底架分别滑设于上轨道402和下轨道403,而其左右侧架则支撑夹取模块405于移动本体404之中做纵向的移动。夹取模块405包括可于移动本体404中上下移动的升降架407和夹取单元406,其中夹取单元406可进行包括夹取、推移、旋转等动作,以便将物流容器2从容器收纳结构101中取出并置于升降架407上。本发明不限制取盒机构的架构与组成,任何可做纵向及/或横向移动并拿取或置放基座装置中的物流容器的装置即可作为取盒机构。
40.取盒机构4还包括集装箱401可拆卸地设于载具5的承载部502上,其中移动机构410可在集装箱401和容器收纳结构101之间将物流容器2做双向的取出与置入。
41.于一个实施例中,夹取单元406包括设于升降架407上的旋转单元408,用以旋转取出的物流容器2至正确的方向以便置入集装箱401或容器收纳结构101。
42.如图10所示,取盒机构4电性或通讯连接基座装置1的取盒控制单元105。取盒控制单元105根据服务器收到的退盒信息和/或启动的标示单元控制取盒机构4的移动机构410位移到对应的容器收纳结构101并控制夹取模块405取出已解锁的物流容器2,而后移动机构4再位移到集装箱401处将物流容器2置入集装箱401中。集装箱401的结构可如图11所示,具有至少两个容置空间放置物流容器2,但本发明并不依此限定集装箱401的架构组成。
43.接着请参照图12,图12是本发明第二实施例的智能物流方法中收货送货流程图。首先,于步骤s601中,外勤用户驾驶载具抵达停靠点,其中停靠点可以是商家用户或是定点储物设备,本发明不依此限制。于步骤s602,取盒控制单元根据服务器传送的退盒信息产生退盒讯号并发送到对应的容器收纳结构的识别控制单元,然后于下一步骤s603中,收到退盒讯号的识别控制单元解锁对应的物流容器并启动其容器收纳结构的标示单元。辨识对应的容器收纳结构与解锁的方法已详述于上(图4),因此不再赘述。于步骤s604中,取盒控制单元控制取盒机构拿取已解锁的物流容器并置入集装箱中。外勤用户可根据启动的标示单元清楚地得知取盒机构是否完成拿取所有目的地为此停靠点的物流容器,并于步骤s605中将容置已解锁的物流容器的集装箱由载具上取下,推送到停靠点。
44.当停靠点是商家用户的时候,外勤用户把集装箱中的已解锁的物流容器拿给商家用户(步骤s6061),而如果商家用户有新的物流容器交给外勤用户的话,外勤用户于步骤s6071把新拿到的物流容器放在集装箱中。
45.当停靠点是定点储物设备的时候,如果定点储物设备是满的(亦即,没有空的收纳空间可放置其他物流容器),外勤用户由定点储物设备拿取新的物流容器并放在集装箱中(步骤s6062)。接着,于步骤s6072,外勤用户把集装箱中的已解锁的物流容器放在定点储物设备中原本收纳新的物流容器的位置。另外,如果定点储物设备不是满的,则步骤s6062可以选择性被执行,且于步骤s6072中,外勤用户把集装箱中的已解锁的物流容器放在定点储物设备中任一个空的位置。
46.外勤用户在分完集装箱中的已解锁的物流容器后,于步骤s608中把集装箱推送到载具处,并将集装箱定位于载具上。接着于步骤s609,取盒控制单元控制取盒机构把集装箱中新的物流容器拿取出来并置入空的容器收纳结构中。于步骤s510,当新的物流容器被置入容器收纳结构时,容器收纳结构的识别控制单元感应到新的物流容器的识别信息并将其锁付其中。
47.请参照图13与图14,分别是本发明第三实施例的智能物流系统的智能储物设备的
侧视示意图与俯视示意图,可于全自动卸货时采用。第三实施例的智能储物设备与上述第二实施例的智能储物设备相似,其差异在于全自动的智能储物设备的取盒机构4没有设置集装箱401,而夹取模块405具有智能识别定位模块409,用以识别定点储物设备中的收纳位置。
48.接着请参照图15,图15是本发明第三实施例的智能物流方法中收货送货流程图。首先,于步骤s701中,外勤用户驾驶载具抵达停靠点,其中停靠点是定点储物设备,或是具有类似定点储物设备的商家用户。于步骤s702,取盒控制单元根据服务器传送的退盒信息产生退盒讯号并发送到对应的容器收纳结构的识别控制单元,然后于下一步骤s703中,收到退盒讯号的识别控制单元解锁对应的物流容器并启动其容器收纳结构的标示单元。辨识对应的容器收纳结构与解锁的方法已详述于上(图4),因此不再赘述。于步骤s704中,服务器传送收货信息给通讯单元,通讯单元将收到的收货信息再传送给取盒控制单元(步骤s705)。于步骤s706中,取盒控制单元根据收货信息驱动智能识别定位模块进行储物设备位置辨别,取盒控制单元驱动智能识别定位模块辨识收货信息,以知悉新的物流容器位于定点储物设备的位置,其中收货信息包括,但不限定,须由此定点储物设备停靠点拿取的物流容器的识别信息与收纳位置,或此定点储物设备中空的物流容器的识别信息与收纳位置。
49.于步骤s707中,取盒控制单元控制取盒机构拿取已解锁的物流容器,然后于步骤s708中,取盒控制单元驱动取盒机构由定点储物设备拿取对应收货信息的新的物流容器。接着于步骤709中,取盒控制单元控制取盒机构放置已解锁的物流容器于定点储物设备中,而于步骤710中,取盒控制单元驱动取盒机构放置新的物流容器于基座装置上空的容器收纳结构。其中,当取盒控制单元控制取盒机构拿取已解锁的物流容器并置入定点储物设备中时,可以是定点储物设备中原本收纳新的物流容器的位置,或是定点储物设备中任一个空的位置。另外,如果此停靠点没有已解锁的物流容器需要置放(亦即没有物流容器的目的地为此停靠点),则步骤s707和s709可以跳过。于步骤s711,当新的物流容器被置入容器收纳结构时,容器收纳结构的识别控制单元感应到新的物流容器的识别信息并将其锁付其中。另外,如果此停靠点没有需要收取的新的物流容器,则步骤s708、710和s711可以跳过。
50.于一个实施例中,取盒机构于步骤s707拿取已解锁的物流容器后,将其暂放于取盒机构,而后于步骤s708拿取新的物流容器,亦将其暂放于取盒机构中,在步骤s709和s710时分别将两个物流容器放置于定点储物设备和基座装置的容器收纳结构。本发明不限定步骤s708~s710的顺序,只要步骤s707早于s709,s708早于s710即可。举例而言,于另一实施例中,取盒机构可以先进行步骤s708和s710,拿取定点储物设备的新的物流容器并置入基座装置上空的容器收纳结构,然后再进行步骤s707和s709,拿取已解锁的物流容器并置入定点储物设备。
51.当退盒信息和收货信息上的物流容器皆被置入新的位置后,取盒控制单元发送完成信号给通讯单元(步骤s712),而通讯单元传送完成信号给服务器(步骤s713)。于步骤s714,服务器在收到完成信号后产生完成通知发送到第一电子装置,知会外勤用户此停靠点的工作已完成,可前往下一个停靠点。
52.另外,上述定点储物设备跟智能储物设备还可以进行物流作业的暂存与转运功能,且特别是长途的物流作业。当外勤用户运送智能储物设备的物流容器送到其中一个定点储物设备时,物流容器自基座装置取下后,被放置于此定点储物设备。接着,于另一位外
勤用户到达前述定点储物设备时,将物流容器自定点储物设备取下,并将物流容器装载于基座装置,并送到下一个定点储物设备。如此,上述智能储物设备可与多个定点储物设备以进行长途物流作业的暂存与转运功能,且物流容器可以在最终的定点储物设备被消费用户解锁物流容器之盖体锁件,以顺利拿取其物流容器内的餐点或商品。
53.综合以上所述,相较于现有技术,本实施例所述的用于智能物流系统的智能物流方法及其智能储物设备的技术效果,说明如下。
54.现有技术中,物流系统的输送载具上的容置设备为一未分隔的空间,且没有将货品固定于其中的装置,使得货品的内容物在输送过程可能会因路况而发生碰撞损坏。反观本发明实施例所述的用于智能物流系统的智能储物设备及使用其的智能物流方法,其提供每个货品独立的容置空间和锁付装置,确保货品内容物不会因位移而产生碰撞和损坏。再者,本发明所述的用于智能物流系统的智能储物设备及使用其的智能物流方法,其中的容器收纳结构更具有标示单元,可降低配送员拿错货品的机率,进而增进配送的效率。
55.本发明在上文中已以较佳实施例揭露,然熟习本项技术者应理解的是,上述实施例仅用于描绘本发明,而不应解读为限制本发明的范围。应注意的是,举凡与前述实施例等效的变化与置换,均应设为涵盖于本发明的范畴内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1