基于插件式架构的巡检系统及其巡检方法
1.本发明属于巡检机器人技术领域,特别是涉及一种基于插件式架构的巡检系统及其巡检方法。
背景技术:
2.智能巡检机器人是特种机器人的一种,以智能化技术为基础,具有可编程性,在某些高危、艰苦的工作环境中模拟人工操作,可以在一定程度上代替传统的人工巡检。目前,智能巡检机器人可以分为三类:无轨、有轨巡检机器人、巡检无人机、水下巡检机器人。
3.目前多数巡检机器人系统都以面向需求开发为主,低重用性使得在面对复杂多样的业务需求时难以保证系统的开发效率,居高不下的开发成本也妨碍了消费市场的扩张。
技术实现要素:
4.本发明的目的在于提供一种基于插件式架构的巡检系统及其巡检方法,解决了现有技术中的多数巡检机器人系统都以面向需求开发为主,低重用性使得在面对复杂多样的业务需求时难以保证系统的开发效率技术问题。
5.为达上述目的,本发明是通过以下技术方案实现的:
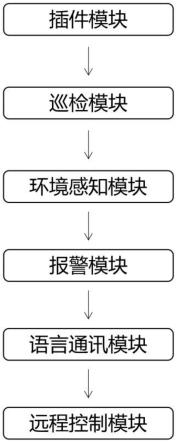
6.一种基于插件式架构的巡检系统,包括
7.插件模块:用于根据用户不同需求设定机器人不同的巡视功能;
8.巡检模块:用于根据预设路线进行巡检作业,且能在未有人工干预的情况下长时间自主运行;
9.环境感知模块:用于对周边环境进行数据采集,以预设信息评估判断当前巡航的范围内是否存在危险,并做出相应的警报措施;
10.报警模块:用于当感器数据不符合设定的警报阈值的情况下,机器人发送报警信息,并将警告存入历史警告,可以在操作终端中查看;
11.语音通讯模块:用于播报报警信息,并与操作终端进行通讯,通过发送文字或发送语音使机器人播报音频;
12.远程控制模块:用于远程控制切换视频流、发送语音、发送文字、语音监听、机器人移动和云台控制。
13.巡检模块包括移动模块、状态控制模块、导航模块、回充模块、机器人信息模块、建图模块、地图模块;
14.移动模块:用于在前端提供一个虚拟摇杆以控制机器人的移动;
15.状态控制模块:用于判断机器人的工作状态,工作状态机有空闲、建图、导入地图、导航四种状态,由于空闲状态和导入地图状态是系统的过度状态,并无具体功能,所以在本实例中避免机器人工作于两种状态之下,仅在切换导航与建图模式下作为衔接状态短暂出现;
16.导航模块:用于当机器人处于导入地图状态时,机器人进入导航状态,用于该模块
下的所有命令;导航模块连接有路径导航模块,路径导航模块用于当机器人处于导航时,可使用导航路径管理和开启回充两个功能;
17.回充模块:用于当机器人收到回充指令时,自主导航至设定的充电位置寻找充电桩;
18.机器人信息模块:用于获取机器人坐标指令返回机器人在导入地图状态下的当前坐标信息;
19.建图模块:用于启动建图指令可使机器人在空闲状态下进入建图模式,持续扫描周围环境以构建一张新的地图;
20.地图模块:用于导入地图指令使机器人从空闲状态进入导入地图状态,地图图片所在路径可自行指定。
21.环境感知模块包括视频模块、温湿度烟雾感知模块、热源感知模块、报警模块;
22.视频模块:用于实现了可见光视频与红外视频,该视频流由云台提供,占用192.168.106.64与192.168.106.65两个ip地址,使用以nodejs与ffmpeg实现的服务器代理视频流,在前端使用flv.js视频组件进行播放;
23.温湿度烟雾感知模块:用于实时获取周边环境的温度、湿度以及烟雾信息;
24.热源感知模块:用于在所配置的云台内,红外视频相机带有检测热源温度功能,由于其接口不适用于第三方开发,所以选择ocr(optical character recognition,光学字符识别)分析获取视频内容上标志的最高热源温度;
25.报警模块:用于当各项传感器数据不符合设定的警报阈值的情况下,机器人使用tts语音模块播报报警信息,并将警告存入历史警告,可以在操作终端中查看。
26.远程控制模块包括slam建图模块、地图编辑模块、设置模块、警报历史模块;
27.slam建图模块:用于对应巡检机器人的建图模式,该模式下可使用导保存地图功能;
28.地图编辑模块:用于对机器人的地图进行修改,可以绘制虚拟墙(黑色线条)、绘制探明区域(白色线条)以及未探明区域(灰色线条);
29.设置模块:用于对各项报警阈值进行设置;
30.警报历史模块:用于查看所有的报警信息。
31.一种基于插件式架构的巡检方法,包括
32.步骤一:用户通过插件的形式来开发机器人的巡视功能,并设定机器人巡视路线;用户可先启动建图模式,可使机器人在空闲状态下进入建图模式,持续扫描周围环境以构建一张新的地图,用户根据构建的地图设定机器人的巡视路线;
33.步骤二:机器人根据设定的路线进行巡视,获取周边环境信息数据,与预设的环境数据进行比对;机器人可通过摄像头拍摄可见光视频与红外视频,通过传感器获取周边环境的温度、湿度以及烟雾信息,机器人根据可见光视频、红外视频、周边环境的温度、湿度以及烟雾信息与设定的环境数据进行比对,对周边的环境数据进行报警;
34.步骤三:当获取的环境信息数据不符合设定的警报阈值的时,机器人发送报警信息,并通过麦克风进行语音播报,并记录报警信息;
35.步骤四:当机器人移动巡视过程中出现障碍物时,机器人暂时巡视左右并原地待命,等待用户重新设定巡视路线;
36.步骤五:当机器人巡视过程中电量低于20%时,机器人中断巡视且自动返回充电桩进行充电,当机器人电量充至90%时,机器人将继续之前中断的巡视任务。
37.本发明的实施例具有以下有益效果:
38.本发明在机器人巡视前能使用插件模块制定机器人的巡视功能,以满足了不同客户个性化的需求,从而减少了机器人需要根据需求进行开发的情况,从而降低了巡视机器人的开发成本,本发明设有回充模块,能使机器人在电量低于20%时自主导航至设定的充电位置寻找充电桩进行充电,从而能使机器人长时间自主的进行巡视工作,从而提高了巡视机器人的工作效率,本发明设有报警模块,能使机器人在巡视过程中获取的周边环境数据与设定的环境数据警报阈值不一致时,通过设置的语音通讯模块播放报警信息,从而提高了巡视机器人的巡视效果。
39.当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
40.构成本技术的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
41.图1为本发明一实施例的巡检机器人功能模块结构示意图;
42.图2为本发明一实施例的巡检模块结构示意图;
43.图3为本发明一实施例的环境感知模块结构示意图;
44.图4为本发明一实施例的远程控制模块结构示意图;
45.图5为本发明一实施例的巡检机器人系统设计结构示意图。
具体实施方式
46.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。
47.为了保持本发明实施例的以下说明清楚且简明,本发明省略了已知功能和已知部件的详细说明。
48.请参阅图1-5所示,在本实施例中提供了一种基于插件式架构的巡检系统,包括:
49.插件模块:用于根据用户不同需求设定机器人不同的巡视功能;
50.巡检模块:用于根据预设路线进行巡检作业,且能在未有人工干预的情况下长时间自主运行;
51.环境感知模块:用于对周边环境进行数据采集,以预设信息评估判断当前巡航的范围内是否存在危险,并做出相应的警报措施;
52.报警模块:用于当感器数据不符合设定的警报阈值的情况下,机器人发送报警信息,并将警告存入历史警告,可以在操作终端中查看;
53.语音通讯模块:用于播报报警信息,并与操作终端进行通讯,通过发送文字或发送语音使机器人播报音频;
54.远程控制模块:用于远程控制切换视频流、发送语音、发送文字、语音监听、机器人
移动和云台控制。
55.巡检模块包括移动模块、状态控制模块、导航模块、回充模块、机器人信息模块、建图模块、地图模块;
56.移动模块:用于在前端提供一个虚拟摇杆以控制机器人的移动;
57.状态控制模块:用于判断机器人的工作状态,工作状态机有空闲、建图、导入地图、导航四种状态,由于空闲状态和导入地图状态是系统的过度状态,并无具体功能,所以在本实例中避免机器人工作于两种状态之下,仅在切换导航与建图模式下作为衔接状态短暂出现;
58.导航模块:用于当机器人处于导入地图状态时,机器人进入导航状态,用于该模块下的所有命令;导航模块连接有路径导航模块,路径导航模块用于当机器人处于导航时,可使用导航路径管理和开启回充两个功能;
59.回充模块:用于当机器人收到回充指令时,自主导航至设定的充电位置寻找充电桩;
60.机器人信息模块:用于获取机器人坐标指令返回机器人在导入地图状态下的当前坐标信息;
61.建图模块:用于启动建图指令可使机器人在空闲状态下进入建图模式,持续扫描周围环境以构建一张新的地图;
62.地图模块:用于导入地图指令使机器人从空闲状态进入导入地图状态,地图图片所在路径可自行指定。
63.环境感知模块包括视频模块、温湿度烟雾感知模块、热源感知模块、报警模块;
64.视频模块:用于实现了可见光视频与红外视频,该视频流由云台提供,占用192.168.106.64与192.168.106.65两个ip地址,使用以nodejs与ffmpeg实现的服务器代理视频流,在前端使用flv.js视频组件进行播放;
65.温湿度烟雾感知模块:用于实时获取周边环境的温度、湿度以及烟雾信息;
66.热源感知模块:用于在所配置的云台内,红外视频相机带有检测热源温度功能,由于其接口不适用于第三方开发,所以选择ocr(optical character recognition,光学字符识别)分析获取视频内容上标志的最高热源温度;
67.报警模块:用于当各项传感器数据不符合设定的警报阈值的情况下,机器人使用tts语音模块播报报警信息,并将警告存入历史警告,可以在操作终端中查看。
68.远程控制模块包括slam建图模块、地图编辑模块、设置模块、警报历史模块;
69.slam建图模块:用于对应巡检机器人的建图模式,该模式下可使用导保存地图功能;
70.地图编辑模块:用于对机器人的地图进行修改,可以绘制虚拟墙(黑色线条)、绘制探明区域(白色线条)以及未探明区域(灰色线条);
71.设置模块:用于对各项报警阈值进行设置;
72.警报历史模块:用于查看所有的报警信息。
73.一种基于插件式架构的巡检方法,包括
74.步骤一:用户通过插件的形式来开发机器人的巡视功能,并设定机器人巡视路线;用户可先启动建图模式,可使机器人在空闲状态下进入建图模式,持续扫描周围环境以构
建一张新的地图,用户根据构建的地图设定机器人的巡视路线;
75.步骤二:机器人根据设定的路线进行巡视,获取周边环境信息数据,与预设的环境数据进行比对;机器人可通过摄像头拍摄可见光视频与红外视频,通过传感器获取周边环境的温度、湿度以及烟雾信息,机器人根据可见光视频、红外视频、周边环境的温度、湿度以及烟雾信息与设定的环境数据进行比对,对周边的环境数据进行报警;
76.步骤三:当获取的环境信息数据不符合设定的警报阈值的时,机器人发送报警信息,并通过麦克风进行语音播报,并记录报警信息;
77.步骤四:当机器人移动巡视过程中出现障碍物时,机器人暂时巡视左右并原地待命,等待用户重新设定巡视路线;
78.步骤五:当机器人巡视过程中电量低于20%时,机器人中断巡视且自动返回充电桩进行充电,当机器人电量充至90%时,机器人将继续之前中断的巡视任务。
79.本发明在机器人巡视前能使用插件模块制定机器人的巡视功能,以满足了不同客户个性化的需求,从而减少了机器人需要根据需求进行开发的情况,从而降低了巡视机器人的开发成本,本发明设有回充模块,能使机器人在电量低于20%时自主导航至设定的充电位置寻找充电桩进行充电,从而能使机器人长时间自主的进行巡视工作,从而提高了巡视机器人的工作效率,本发明设有报警模块,能使机器人在巡视过程中获取的周边环境数据与设定的环境数据警报阈值不一致时,通过设置的语音通讯模块播放报警信息,从而提高了巡视机器人的巡视效果。
80.在步骤一中,巡检机器人由硬件端、后端以及前端三层主架构搭建而成,插件式架构能使系统轻松管理以标准化接口方式抽象为插件的功能模块项目,巡检机器人系统后端、前端两层端层级的插件式架构,由于硬件端的多数设备本身提供调用api接口,且机械结构的安装与拆卸与“即插即用”有着相同的设计理念,所以不再重复添加进整体的架构设计之中,相关的配置信息将整合进后端插件管理器中;
81.前端插件管理器中插件以组件的方式呈现,通过对后端插件管理器提供的api接口,对单独功能的业务逻辑进行整合,形成一个独立的功能集合,并提供一些相应的基础样式。对于插件使用者来说,可以在不影响基础功能的情况下对呈现样式进行相应的个性化修改;
82.后端插件管理器对插件的各项基础信息与函数做出了一定的规范需求:对于有硬件设备连接需求的插件,需要提供硬件的连接方式与调用接口以构建相应的数据链接,例如以usb连接的设备,可以通过相应的串口工具,通过提供的调用接口提取数据,或是通过以太网连接的设备,后端对网络端口进行访问操作来获取数据。通过对网络通讯流量的需求量进行分类,将插件分类为低频率调用插件、高频率调用插件以及数据流插件,使用不同的服务端传输数据可以有效优化网络环境,防止访问频率过高的请求堵塞网络。在后端插件将实现其需求的业务逻辑,并最终将相应的信息以api接口的形式提供给前端插件。
83.前端设计,为了减少插件开发的工作量以及适配全平台的使用,前端以超文本标记语言(hyper text markup language,html)为基础,搭配基于javascript语言的vue.js架构进行组件的开发,并使用ant design ui组件库进行统一的风格管理。对于个性化设置,本系统提供一套初始样式,插件使用者可以通过vue.js的组件功能对原始组件进行重新封装,替换原有的样式风格,构建个性化的人机交互界面;
84.后端设计,后端部署了fastapi和nodejs两个高性能web服务器。在后端插件管理器中,通过通讯流量的需求量将插件分类为低频率调用插件、高频率调用插件以及数据流插件;低频率调用插件以超文本传输协议(hyper text transfer protocol,http)呈现接口,在本系统实例中,例如切换模式、回充电桩、开始导航等命令式来自前端的网络请求都以该协议进行数据的传输;高频率调用插件,例如读取机器人信息、更新地图信息、移动等需要长时间连接、使用频率高且需要低延迟响应的这类功能,使用websocket协议可以有效的优化网络环境,减少堵塞的风险。
85.传感器一侧装设有电路板,电路板装设在机器人内,电路板一侧开设有凹槽,电路板一侧开设有多个安装孔,传感器一侧装设有与凹槽相配合的凸块,凹槽内均装设有与凸块相配合的卡块;凹槽相对两侧均开设有放置槽,两个卡块滑动配合在两个放置槽内,放置槽与卡块滑动之间装设有第一弹性伸缩杆;放置槽相对两侧均开设有滑槽,卡块两侧均装设有与两个滑槽相配合的滑块;凸块相对两侧均开设有与卡块相配合的卡槽;卡块的横截面形状为梯形,卡槽内开设有与梯形卡块相配合的斜面,电路板内开设有与放置槽相配合的内腔,从而便于通过两个卡块与两个卡槽的卡接将传感器与电路板固定;内腔内滑动配合有压杆,压杆与内腔之间装设有第二弹性伸缩杆,内腔内装设有与压杆相配合的气泵;气泵内滑动配合有第一活塞、第二活塞,第一活塞一侧装设有与压杆固定连接的l型杆,第二活塞一侧装设有与卡块相配合的挤压杆;卡块一侧装设有凹型杆,凹型杆一侧装设有移动杆,移动杆一侧开设有与挤压杆相配合的挤压槽;挤压槽内与移动杆一端均开设有相互配合的斜面,从而便于通过压杆移动带动两个卡块与两个卡槽解除卡接将传感器拆卸。
86.在对传感器进行安装时,用户先将通过多个安装孔用螺栓将电路板与墙体固定,用户再移动显示屏,将凸块完全移动至凹槽后,两个卡块通过第一弹性伸缩杆的弹力分别与两个卡槽相互卡接,从而将显示屏与电路板进行安装,在需要对显示屏拆卸维修时,用户按压压杆,压杆移动带动l型杆移动,l型杆移动带动第一活塞移动,第一活塞移动在气泵内挤压第二活塞移动,第二活塞移动带动挤压杆移动,挤压杆移动通过斜面挤压挤压槽的斜面带动移动杆移动,移动杆移动带动凹型杆移动,凹型杆移动带动卡块移动,卡块移动解除与卡槽的卡接,移动拉动显示屏,然而松开压杆,压杆通过弹性复位,即可完成对显示屏拆卸维修。
87.上述实施例可以相互结合。
88.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
89.以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1