地面巡检方法、装置及巡检系统与流程
本技术涉及地面巡检,具体涉及地面巡检机器人地面巡检方法、装置及巡检系统。
背景技术:
1、在现有技术中,仓库门的开关与巡检机器人之间的操作系统可以采用以下几种方式:
2、无线通信:通过无线通信技术(如wi-fi、蓝牙等),将仓库门的开关与巡检机器人连接起来。开关可以发送信号给机器人,指示门的状态(开启或关闭),机器人接收到信号后可以执行相应的操作。
3、有线连接:通过有线连接方式(如串口、以太网等),将仓库门的开关与巡检机器人连接起来。开关可以通过有线连接将门的状态信息传输给机器人,机器人接收到信息后可以进行相应的操作。
4、中央控制系统:在仓库中设置一个中央控制系统,该系统可以接收门开关的信号,并向巡检机器人发送指令。巡检机器人通过与中央控制系统的通信,获取门的状态信息,并执行相应的操作。
5、至于仓库门判别动物的方法,常用的技术有以下几种:
6、视觉识别:利用摄像头或其他视觉传感器,对门附近的区域进行监控和图像识别。通过图像处理和机器学习算法,识别门附近是否有动物出现。
7、红外传感器:使用红外传感器来检测门附近的热量变化。动物通常会产生热量,通过检测热量变化,可以判断门附近是否有动物。
8、声音识别:利用麦克风或其他声音传感器,对门附近的声音进行监测和识别。通过声音的频率、强度等特征,判断门附近是否有动物发出声音。
9、红外线传感器:使用红外线传感器来检测门附近的物体。动物通常会产生红外线,通过检测红外线的变化,可以判断门附近是否有动物。
10、但是,现有技术仅对无门槛通行门进行控制,对于设置门槛仓库,现有门槛结构和控制系统均无法适用。
技术实现思路
1、有鉴于此,本技术提供了一种地面巡检方法、装置及巡检系统,能够快速感应、判断分析靠近门槛的物体,控制门槛通行门开合,提高巡检效率,保证仓库安全性。
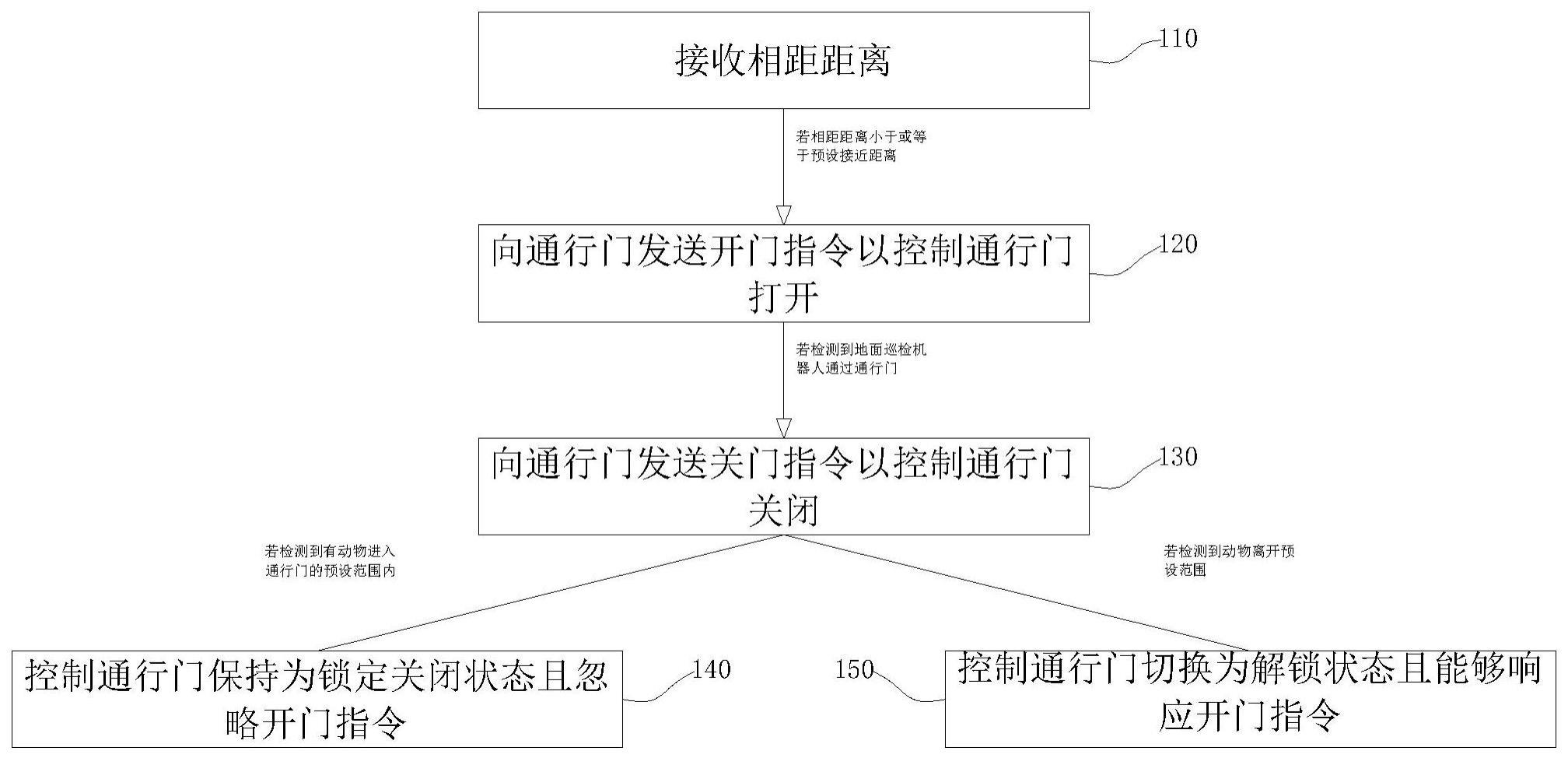
2、第一方面,本技术提供的一种地面巡检方法,应用于一种地面巡检机器人的巡检过程,所述地面巡检机器人在电力设备仓库内外巡检,所述电力设备仓库的入口处具有仓库门槛,所述仓库门槛设有通行口,所述通行口设有距离传感模块以及可开闭的通行门,所述距离感应模块用于检测与所述地面巡检机器人的相距距离;其中,所述地面巡检方法包括:接收所述相距距离;若所述相距距离小于或等于预设接近距离,则向所述通行门发送开门指令以控制所述通行门打开;若检测到所述地面巡检机器人通过所述通行门,则向所述通行门发送关门指令以控制所述通行门关闭;若检测到有动物进入所述通行门的预设范围内,则控制所述通行门保持为锁定关闭状态且忽略所述开门指令;以及若检测到动物离开所述预设范围,则控制所述通行门切换为解锁状态且能够响应所述开门指令。
3、本方面在使用时,仓库的入口处设有仓库门槛,门槛上设有通行口,通行口设有距离传感模块和可开闭的通行门。该方法的使用方式如下:地面巡检机器人接收与其相距的距离信息,这是通过距离传感模块实现的。传感模块检测地面巡检机器人与通行门之间的距离,并将距离信息传输给机器人。如果检测到地面巡检机器人与通行门的相距距离小于或等于预设的接近距离,机器人向通行门发送开门指令,以控制通行门打开。这样,机器人可以通过通行门进入或离开仓库。一旦检测到地面巡检机器人通过了通行门,机器人向通行门发送关门指令,以控制通行门关闭。这样,通行门可以保持关闭状态,确保仓库的安全性。如果检测到有动物进入通行门的预设范围内,地面巡检机器人会控制通行门保持为锁定关闭状态,并忽略开门指令。这样可以防止动物进入仓库内部。一旦检测到动物离开了预设范围,地面巡检机器人会控制通行门切换为解锁状态,并能够响应开门指令。这样,当地面巡检机器人需要再次进入或离开仓库时,通行门可以打开。通过以上方式,地面巡检机器人可以安全地在电力设备仓库内外进行巡检。通行门的开闭状态可以根据机器人的位置和动物的存在进行自动控制,提高了巡检的效率和安全性。
4、结合第一方面,在一种可能的实现方式中,所述通行门包括第一闸口和第二闸口,所述第一闸口和所述第二闸口分别设置在所述仓库门槛的相对两侧,所述第一闸口和所述第二闸口之间的间距大于所述地面巡检机器人的头尾长度;其中,所述若所述相距距离小于或等于预设接近距离,则向所述通行门发送开门指令以控制所述通行门打开包括:若所述相距距离小于或等于预设接近距离,则控制所述第一闸口打开;若所述地面巡检机器人驶入并通过所述第一闸口,则控制所述第一闸口关闭;控制所述第二闸口打开,若所述地面巡检机器人驶入并通过所述第二闸口,则控制所述第二闸口关闭。
5、结合第一方面,在一种可能的实现方式中,所述第一闸口处设有第一红外传感器,所述第一红外传感器的探测方向朝向所述第一闸口的正下方;所述方法还包括:若所述相距距离小于或等于预设接近距离,控制所述第一红外传感器启动;其中,所述若所述地面巡检机器人驶入并通过所述第一闸口,则控制所述第一闸口关闭包括:获取所述地面巡检机器人首次触发所述第一红外传感器生成的第一触发信号;以及若不再获取到所述地面巡检机器人触发所述第一红外传感器的触发信号,则控制所述第一闸口关闭。
6、结合第一方面,在一种可能的实现方式中,所述第一闸口处设有第二红外传感器,所述第人红外传感器的探测方向朝向所述第二闸口的正下方;所述方法还包括:若所述第一闸口关闭,则控制所述第二红外传感器启动;其中,所述控制所述第二闸口打开,若所述地面巡检机器人驶入并通过所述第二闸口,则控制所述第二闸口关闭包括:获取所述地面巡检机器人首次触发所述第二红外传感器生成的第二触发信号;以及若不再获取到所述地面巡检机器人触发所述第二红外传感器的触发信号,则控制所述第二闸口关闭。
7、结合第一方面,在一种可能的实现方式中,所述第一闸口和所述第二闸口之间设有摄像模块,所述摄像模块用于拍摄所述第一闸口和所述第二闸口之间的区域图像;其中,所述若所述相距距离小于或等于预设接近距离,则向所述通行门发送开门指令以控制所述通行门打开还包括:在所述控制所述第一闸口关闭之后,控制所述地面巡检机器人停机;获取所述区域图像;若所述区域图像中存在动物,则获取动物图像;若所述动物图像对应的动物种类符合允许通过种类,则执行所述控制所述第二闸口打开,若所述地面巡检机器人驶入并通过所述第二闸口,则控制所述第二闸口关闭。
8、结合第一方面,在一种可能的实现方式中,所述第一闸口和所述第二闸口之间设有动物灭除装置;其中,所述若所述相距距离小于或等于预设接近距离,则向所述通行门发送开门指令以控制所述通行门打开还包括:若所述动物图像对应的动物种类不符合允许通过种类,则判断所述动物种类为第一预设种类或第二预设种类;若所述动物种类为第一预设种类,则控制所述动物灭除装置杀灭所述动物;若所述动物图像静止不动,则执行所述控制所述第二闸口打开,若所述地面巡检机器人驶入并通过所述第二闸口,则控制所述第二闸口关闭;以及若所述动物种类为第二预设种类,则向上位服务器发送报警信息并锁定所述第二闸口。
9、结合第一方面,在一种可能的实现方式中,所述若所述相距距离小于或等于预设接近距离,则向所述通行门发送开门指令以控制所述通行门打开还包括:若所述动物种类包括所述第一预设种类和所述第二预设种类,则向上位服务器发送报警信息并锁定所述第二闸口。
10、第二方面,本技术提供的一种地面巡检系统,应用于一种地面巡检机器人的巡检过程,所述地面巡检机器人在电力设备仓库内外巡检,所述电力设备仓库的入口处具有仓库门槛,所述仓库门槛设有通行口,所述通行口设有距离传感模块以及可开闭的通行门,所述距离感应模块用于检测与所述地面巡检机器人的相距距离;其中,所述地面巡检系统包括:距离获取模块,配置为:接收所述相距距离;开关门模块,与所述距离获取模块通讯连接,所述开关门模块配置为:若所述相距距离小于或等于预设接近距离,则向所述通行门发送开门指令以控制所述通行门打开;若检测到所述地面巡检机器人通过所述通行门,则向所述通行门发送关门指令以控制所述通行门关闭;动物检测模块,配置为:若检测到有动物进入所述通行门的预设范围内,则控制所述通行门保持为锁定关闭状态且忽略所述开门指令;以及若检测到动物离开所述预设范围,则控制所述通行门切换为解锁状态且能够响应所述开门指令。
11、第三方面,本技术提供的一种电子设备,所述电子设备包括:处理器;以及用于存储所述处理器可执行指令的存储器;其中,所述处理器用于执行第一方面所述的地面巡检方法。
12、第四方面,本技术提供的一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序用于执行上述权利要求1-7任一项所述的地面巡检方法。
13、与现有技术相比,本技术技术方案具备的有益效果为:
14、1)提高巡检效率:地面巡检机器人可以根据与通行门的相距距离自动控制通行门的开闭状态,避免了人工干预的需要,提高了巡检的效率。机器人可以快速进入和离开仓库,减少了等待时间。
15、2)提高巡检安全性:通过距离感应模块检测地面巡检机器人与通行门的相距距离,可以确保机器人与门之间的安全间隔。同时,当检测到有动物进入通行门的预设范围内时,机器人会控制通行门保持为锁定关闭状态,防止动物进入仓库,提高了巡检的安全性。
16、3)自动化控制:地面巡检机器人根据接收到的相距距离信息自动发送开门和关门指令,实现了通行门的自动化控制。这样可以减少人工操作的需求,提高了巡检过程的自动化程度。
17、4)灵活适应环境变化:当检测到动物离开预设范围时,地面巡检机器人会将通行门切换为解锁状态,并能够响应开门指令。这样可以灵活适应环境变化,方便地面巡检机器人再次进入或离开仓库。
18、综上所述,该地面巡检方法通过自动化控制通行门的开闭状态,提高了巡检效率和安全性,同时具备灵活适应环境变化的特点,为地面巡检机器人的巡检过程带来了有益的效果。
- 还没有人留言评论。精彩留言会获得点赞!