一种车辆检测方法及车辆检测系统与流程
本申请属于智能交通,尤其涉及一种车辆检测方法及车辆检测系统。
背景技术:
1、在高速公路上,车辆超载的情况时有发生;车辆超载运输不仅对公路、桥梁等造成非正常损坏,而且极易引发交通事故,危及人们的生命和财产安全。利用信息化手段科技治超已成为治理货运超限超载的主要途径。其中,高速公路不停车动态称重检测系统是科技治超中不可或缺的一个环节。
2、然而,基于传统的车辆超载识别方式,由于在车辆行驶过程中,可能存在前车遮挡后车、拍摄光线差及车牌像素低、同时出现多个车辆的车牌信息或者车辆变道行驶使得车辆与车道信息不匹配等因素,从而无法获取准确的取证信息,导致对车辆检测的准确度较低的问题。
技术实现思路
1、有鉴于此,本申请实施例提供了一种车辆超载识别方法、装置及终端设备,可以提高对车辆检测的准确度。
2、本申请实施例的第一方面提供了一种车辆检测方法,应用于包括位置检测装置和拍摄装置的车辆检测系统;在其中至少一个车道的检测区域中沿道路延伸方向依次划分出多个识别区域,该方法包括:
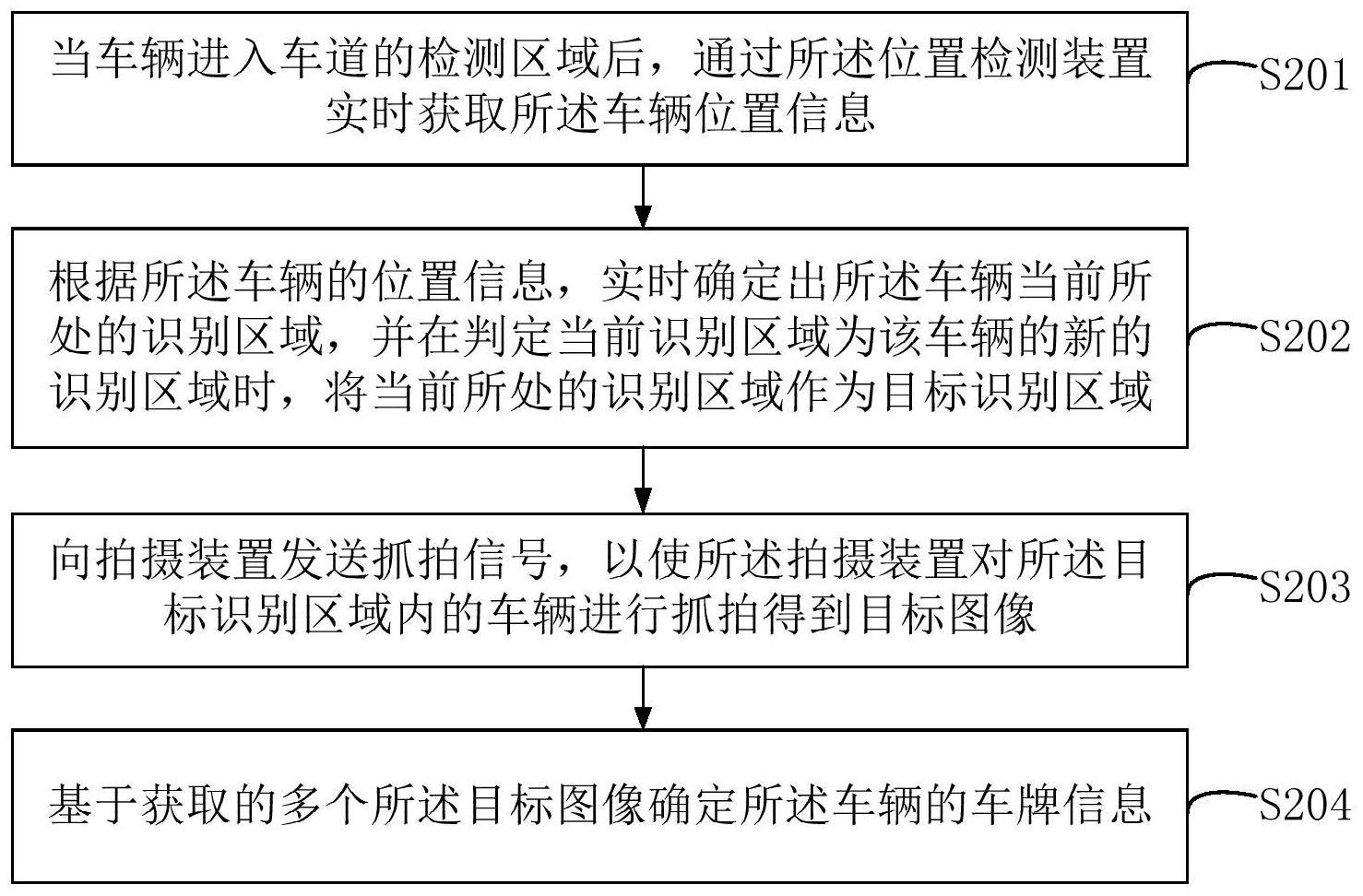
3、当车辆进入车道的检测区域后,通过所述位置检测装置实时获取所述车辆位置信息;根据所述车辆的位置信息,实时确定出所述车辆当前所处的识别区域,并在判定当前识别区域为该车辆的新的识别区域时,将当前所处的识别区域作为目标识别区域;向拍摄装置发送抓拍信号,以使所述拍摄装置对所述目标识别区域内的车辆进行抓拍得到目标图像;基于获取的多个所述目标图像确定所述车辆的车牌信息。
4、在第一方面的一种可能的实现方式中,每两个相邻的所述识别区域紧邻或部分重叠。
5、在第一方面的一种可能的实现方式中,所述基于获取的多个所述目标图像确定所述车辆的车牌信息,包括:
6、从同一车辆对应的多个所述目标图像中,确定出清晰度最高、且带有车牌的目标图像,并对确定出的目标图像对应的识别区域进行车牌识别,确定所述车辆的车牌信息。
7、在第一方面的一种可能的实现方式中,所述位置检测装置包括称重装置或激光装置;
8、其中,所述称重装置包括平行布置于每一车道内的m个传感器组件,将所述m个传感器组件沿行车方向划分到多个所述识别区域中,且每一所述识别区域中包括至少两个所述传感器组件,m为大于2的整数。
9、在第一方面的一种可能的实现方式中,所述根据所述车辆的位置信息,确定出所述车辆当前所处的识别区域,包括:
10、根据接收到的所述位置信息,确定所述车辆的车牌位置;
11、根据确定的所述车辆的车牌位置,确定所述车辆当前所处的所述目标识别区域。
12、在第一方面的一种可能的实现方式中,所述根据接收到的所述位置信息,确定所述车辆的车牌位置,包括:
13、根据接收到的所述位置信息,确定所述车辆的首轴的左轮位置和右轮位置;
14、根据所述首轴的左轮位置和右轮位置,确定所述车牌位置。
15、在第一方面的一种可能的实现方式中,所述根据所述车牌位置,确定所述车辆当前所处的目标识别区域,包括:
16、计算每个所述识别区域的中心与所述车牌位置的距离;
17、确定多个所述距离中的最小值所对应的识别区域为所述目标识别区域。
18、在第一方面的一种可能的实现方式中,当所述车辆检测系统包括所述称重装置时,所述方法还包括:
19、当所述车辆经过所述称重装置时,所述称重装置采集并更新所述车辆的车辆信息,所述车辆信息包括:基于所述目标图像识别出的所述车辆的车牌号、所述车辆的车轴数量、轴距、轴重中的至少一项。
20、本申请实施例的第二方面提供了一种车辆检测系统,在每一车道的检测区域中沿道路延伸方向依次划分出多个识别区域;所述车辆检测系统包括:
21、位置检测装置,当车辆进入车道的检测区域后,实时获取所述车辆位置信息;
22、数据处理平台,用于根据所述车辆的位置信息,实时确定出所述车辆当前所处的识别区域,并在判定当前识别区域为该车辆的新的识别区域时,将当前所处的识别区域作为目标识别区域;以及,生成并发送抓拍信号给拍摄装置;
23、所述拍摄装置,用于接收所述拍摄信号,并根据所述拍摄信号对所述目标识别区域内的车辆进行抓拍得到目标图像,并基于获取的多个所述目标图像确定所述车辆的车牌信息。
24、在第二方面的一种可能的实现方式中,所述拍摄装置从同一车辆对应的多个所述目标图像中,确定出清晰度最高、且带有车牌的目标图像,并对确定出的目标图像对应的识别区域进行车牌识别。
25、本申请实施例的第三方面提供了一种终端设备,所述终端设备包括存储器、处理器,所述存储器上存储有可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述第一方面中任一项所述车辆检测方法的步骤。
26、本申请实施例的第四方面提供了一种计算机可读存储介质,包括:存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如上述第一方面中任一项所述车辆检测方法的步骤。
27、本申请实施例的第五方面提供了一种计算机程序产品,当计算机程序产品在终端设备上运行时,使得终端设备执行上述第一方面中任一项所述车辆检测方法。
28、本申请实施例与现有技术相比存在的有益效果是:通过本申请实施例,当车辆进入车道的检测区域后,通过所述位置检测装置实时获取所述车辆位置信息;根据所述车辆的位置信息,确定出所述车辆当前所处的识别区域,并作为目标识别区域;向拍摄装置发送抓拍信号,以使所述拍摄装置对所述目标识别区域内的车辆进行抓拍得到目标图像,并基于所述目标图像进行车牌识别;通过本申请实施例,拍摄装置可以实时抓拍并获取到当前目标识别区域内的车辆车牌信息,以解决前车遮挡后车以及同时识别区域中同时出现多个车辆的车牌信息所导致的车牌误检或漏检的问题,提高了对车辆车牌检测的准确度。
技术特征:
1.一种车辆检测方法,其特征在于,应用于包括位置检测装置和拍摄装置的车辆检测系统;在其中至少一个车道的检测区域中沿道路延伸方向依次划分出多个识别区域;
2.如权利要求1所述的方法,其特征在于,每两个相邻的所述识别区域紧邻或部分重叠。
3.如权利要求1所述的方法,其特征在于,所述基于获取的多个所述目标图像确定所述车辆的车牌信息,包括:
4.如权利要求1所述的方法,其特征在于,所述位置检测装置包括称重装置或激光装置;
5.如权利要求1所述的方法,其特征在于,所述根据所述车辆的位置信息,确定出所述车辆当前所处的识别区域,包括:
6.如权利要求5所述的方法,其特征在于,所述根据接收到的所述位置信息,确定所述车辆的车牌位置,包括:
7.如权利要求5所述的方法,其特征在于,所述根据所述车牌位置,确定所述车辆当前所处的目标识别区域,包括:
8.如权利要求4所述的方法,其特征在于,当所述车辆检测系统包括所述称重装置时,所述方法还包括:
9.一种车辆检测系统,其特征在于,在每一车道的检测区域中沿道路延伸方向依次划分出多个识别区域;所述车辆检测系统包括:
10.如权利要求9所述的车辆检测系统,其特征在于,所述拍摄装置从同一车辆对应的多个所述目标图像中,确定出清晰度最高、且带有车牌的目标图像,并对确定出的目标图像对应的识别区域进行车牌识别。
技术总结
本申请提供了一种车辆检测方法及车辆检测系统,适用于智能交通技术领域,该方法包括:当车辆进入车道的检测区域后,通过所述位置检测装置实时获取所述车辆位置信息;根据所述车辆的位置信息,确定出所述车辆当前所处的识别区域,并作为目标识别区域;向拍摄装置发送抓拍信号,以使所述拍摄装置对所述目标识别区域内的车辆进行抓拍得到目标图像,并基于所述目标图像进行车牌识别。通过本申请实施例,拍摄装置可以实时抓拍并获取到当前目标识别区域内的车辆车牌信息,以解决前车遮挡后车以及同时识别区域中同时出现多个车辆的车牌信息所导致的车牌误检或漏检的问题。
技术研发人员:方睿,汪广业,刘全
受保护的技术使用者:北京万集科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!