信息提供系统、信息提供方法以及程序与流程
1.本发明涉及向跨骑型车辆的驾驶员提供信息的信息提供系统、信息提供方法以及程序。
背景技术:
2.在专利文献1中公开了如下内容:从多个车辆获取包含急刹车的发生场所的行驶信息,并向用户提供将急刹车的发生场所表示为危险场所的地图。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2014-191774号公报
技术实现要素:
6.发明所要解决的问题
7.在两轮车辆等跨骑型车辆中,影响行驶的道路环境有时与四轮车辆不同。例如,在道路环境中,可能存在人孔、道路上的孔(凹凸)等对于四轮车辆而言影响小但对于跨骑型车辆而言影响大的构造物、状况。因此,作为促使跨骑型车辆的驾驶员注意的部位,如专利文献1所记载的那样,仅通知急刹车的发生场所是不充分的。
8.对此,本发明的目的在于,向驾驶员提供针对道路环境而适合于跨骑型车辆的信息。
9.用于解决问题的手段
10.技术方案1的本发明所涉及的信息提供系统是向跨骑型车辆(sv)的驾驶员提供信息的信息提供系统(100),其特征在于,所述信息提供系统(100)具备:获取机构(11a),其获取与所述跨骑型车辆的行进路径相关的信息;确定机构(11b),其在由所述获取机构获取到的所述行进路径中,确定应该促使所述驾驶员注意的注意部位;以及通知机构(11d),其将由所述确定机构确定出的所述注意部位通知给所述驾驶员,所述确定机构基于表示过去在所述行进路径上行驶的参照车辆在所述行进路径上的倾斜的倾斜信息来确定所述注意部位。
11.技术方案2的本发明的特征在于,所述确定机构将在所述倾斜信息中所述参照车辆的倾斜变得异常的异常部位确定为所述注意部位。
12.技术方案3的本发明的特征在于,所述确定机构基于所述行进路径的道路形状求出所述行进路径上的所述参照车辆的适当倾斜,将所述倾斜信息中的所述参照车辆的倾斜与所述适当倾斜之差为预定值以上的部位确定为所述注意部位。
13.技术方案4的本发明的特征在于,所述倾斜信息包含所述参照车辆的倾斜数据、角速度数据以及角加速度数据中的至少一个信息。
14.技术方案5的本发明的特征在于,所述确定机构基于作为所述参照车辆的跨骑型车辆和四轮车辆在所述行进路径上的行驶路线之差来确定所述注意部位。
15.技术方案6的本发明所涉及的信息提供系统是向跨骑型车辆(sv)或四轮车辆的驾驶员提供信息的信息提供系统(100),其特征在于,所述信息提供系统具备:获取机构(11a),其获取与所述跨骑型车辆或四轮车辆的行进路径相关的信息;确定机构(11b),其在由所述获取机构获取到的所述行进路径中,确定应该促使所述驾驶员注意的注意部位;以及通知机构(11d),其将由所述确定机构确定出的所述注意部位通知给所述驾驶员,所述确定机构基于过去在所述行进路径上行驶的作为参照车辆的跨骑型车辆和四轮车辆在所述行进路径上的行驶路线之差,来确定所述注意部位。
16.技术方案7的本发明的特征在于,所述确定机构将所述差的变化量为预定值以上的部位确定为所述注意部位。
17.技术方案8的本发明的特征在于,所述信息提供系统还具备判断机构(11c),该判断机构判断由所述确定机构确定出的所述注意部位对跨骑型车辆的影响度,所述通知机构根据由所述判断机构判断出的所述影响度来变更通知方式。
18.发明效果
19.根据技术方案1的本发明,能够将对于四轮车辆而言影响小但对于跨骑型车辆而言影响大的部位、即对于跨骑型车辆而言特别需要注意的部位通知给跨骑型车辆的驾驶员。因此,能够适当地向驾驶员通知对于跨骑型车辆而言有益的信息。另外,通过使用过去行驶的参照车辆的倾斜信息,能够提高对于跨骑型车辆而言特别需要注意的部位的确定精度。
20.根据技术方案2的本发明,能够基于参照车辆的倾斜信息,高精度地确定对于跨骑型车辆而言特别需要注意的部位。
21.根据技术方案3的本发明,通过求出与道路形状对应的适当倾斜度,能够适当地判断参照车辆的倾斜度反常(异常)的部位,能够高精度地确定对于跨骑型车辆而言特别需要注意的部位。
22.根据技术方案4的本发明,能够使用适当的数据作为参照车辆的倾斜信息。
23.根据技术方案5的本发明,通过以作为参照车辆的四轮车辆的行驶路线为基准,能够适当地判断作为参照车辆的跨骑型车辆的行驶路线反常(异常)的部位,能够高精度地确定对于跨骑型车辆而言特别需要注意的部位。
24.根据技术方案6的本发明,通过使用作为参照车辆的四轮车辆的行驶路线与作为参照车辆的跨骑型车辆的行驶路线之差,能够将对于跨骑型车辆或四轮车辆而言特别需要注意的部位通知给驾驶员。
25.根据技术方案7的本发明,能够基于作为参照车辆的跨骑型车辆与四轮车辆的路线差,高精度地确定对于跨骑型车辆(或四轮车辆)而言特别需要注意的部位。
26.根据技术方案8的本发明,能够使驾驶员可靠地识别对跨骑型车辆的影响度比较高的部位,并且能够减少频繁地通知对跨骑型车辆的影响度比较低的部位的麻烦。
27.本发明的其他特征及优点通过参照附图的以下的说明而变得明确。此外,在附图中,对相同或同样的结构标注相同的附图标记。
附图说明
28.附图包含在说明书中,构成其一部分,表示本发明的实施方式,与其记述一起用于
说明本发明的原理。
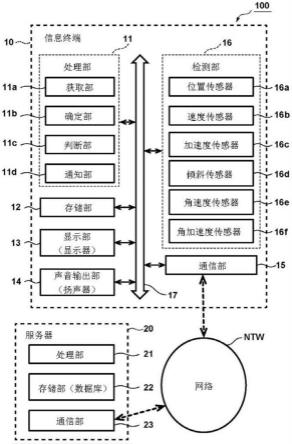
29.图1是表示信息提供系统的结构的框图。
30.图2是表示在跨骑型车辆上搭载有信息终端的例子的图。
31.图3是车辆中发生的事件与其检测中使用的信息的对应图。
32.图4是表示执行信息提供程序时的处理的流程图。
33.图5是表示注意部位的确定处理的流程图。
34.图6a是表示参照车辆的倾斜信息的一例的图。
35.图6b是表示参照车辆的倾斜信息的一例的图。
36.图7a是表示参照车辆的倾斜信息的一例的图。
37.图7b是表示参照车辆的倾斜信息的一例的图。
38.图8a是表示参照车辆的行驶路线信息的一例的图。
39.图8b是表示参照车辆的行驶路线信息的一例的图。
具体实施方式
40.以下,参照附图对实施方式进行详细说明。此外,以下的实施方式并不限定技术方案所涉及的发明,另外,实施方式中说明的特征的全部组合并不限定为发明所必须的内容。在实施方式中说明的多个特征中的两个以上的特征也可以任意地组合。另外,对相同或同样的结构标注相同的附图标记,并省略重复的说明。
41.《第一实施方式》
42.[系统结构]
[0043]
对本发明的第一实施方式进行说明。图1是表示本实施方式的信息提供系统100的结构的框图。本实施方式的信息提供系统100例如能够包括经由网络ntw以能够相互通信的方式连接的信息终端10以及服务器装置(信息管理服务器)20。在此,以下说明的图1的结构分别能够成为实施程序所涉及的本发明的计算机。
[0044]
首先,对信息终端10的结构进行说明。信息终端10也可以构成为安装(固定)于跨骑型车辆的车载装置,但在本实施方式中能够构成为便携终端。移动终端例如是近年来广泛普及的智能手机、平板终端等除了通话功能之外还具有各种功能的设备,例如如图2所示,能够构成为通过专用的保持机构hm相对于跨骑型车辆sv能够装卸。图2示出了使用专用的保持机构hm将作为便携终端的信息终端10搭载于跨骑型车辆sv的例子。另外,作为搭载有本实施方式的信息终端10的跨骑型车辆sv,可以是摩托车,也可以是自行车或三轮车等其他形式的跨骑型车辆。
[0045]
根据本实施方式的信息终端10可以包括例如处理部11、存储部12、显示部13、声音输出部14、通信部15和检测部16。信息终端10的各部经由系统总线17以能够相互通信的方式连接。
[0046]
处理部11可以包括以cpu为代表的处理器、半导体存储器等存储设备、外部设备的接口等。在存储部12中存储有处理器执行的程序、处理器在处理中使用的数据等,处理部11能够将存储于存储部12的程序读出到存储器等存储设备来执行。在本实施方式的情况下,在存储部12中存储有用于向跨骑型车辆的驾驶员提供与注意部位相关的信息的应用程序(以下,有时称为“信息提供程序”),处理部11能够将存储在存储部12中的信息提供程序读
出到存储器等存储设备中并执行。
[0047]
在本实施方式的处理部11中,例如设置有获取部11a、确定部11b、判断部11c以及通知部11d。获取部11a获取与跨骑型车辆sv的行进路径(行驶预定路线)相关的信息。确定部11b在由获取部获取到的跨骑型车辆sv的行进路径中,确定应该促使跨骑型车辆sv的驾驶员注意的注意部位。判断部11c判断由确定部11b确定的注意部位对跨骑型车辆sv的影响度。通知部11d将由确定部11b确定出的注意部位经由显示部13和/或声音输出部14通知给跨骑型车辆sv的驾驶员。
[0048]
显示部13可以包括通过显示图像向驾驶员通知信息的显示器。在本实施方式的情况下,显示部13(显示器)例如包括触摸面板式lcd(liquid crystal display:液晶显示器)等,除了显示图像的功能之外,还具有作为受理来自驾驶员的信息的输入的输入部的功能。或者,也可以使显示部13(显示器)仅具有显示图像的功能,与显示部13独立地设置输入部(例如小键盘)。另外,声音输出部14可以包括向信息终端10的周围输出声音的扬声器。
[0049]
通信部15经由网络ntw而与服务器装置20能够通信地连接。具体而言,通信部15具有作为经由网络ntw向服务器装置20发送信息的发送部的功能、和作为经由网络ntw从服务器装置20接收信息的接收部的功能。
[0050]
例如,检测部16可以包括位置传感器16a、速度传感器16b、加速度传感器16c、倾斜传感器16d、角速度传感器16e和角加速度传感器16f。位置传感器16a例如包括gps传感器,检测信息终端10的当前位置作为跨骑型车辆sv的当前位置。速度传感器16b检测信息终端10的速度作为跨骑型车辆sv的速度。加速度传感器16c检测信息终端10的加速度作为跨骑型车辆sv的加速度。倾斜传感器16d检测信息终端10的倾斜作为跨骑型车辆sv的倾斜(侧倾角)。角速度传感器16e检测信息终端10的角速度作为跨骑型车辆sv的角速度(例如,偏航轴角速度)。角加速度传感器16f检测信息终端10的角加速度作为跨骑型车辆sv的角加速度(例如,偏航轴角加速度)。倾斜传感器16d、角速度传感器16e以及角加速度传感器16f例如能够由陀螺仪传感器构成。
[0051]
在此,虽然本实施方式的信息终端10为通过检测部16的各个传感器而对跨骑型车辆sv的位置数据、速度数据、加速度数据、倾斜数据(侧倾角数据)、角速度数据以及角加速度数据进行检测的结构,但并不限定于此。例如,信息终端10也可以被构成为,利用使用了bluetooth(注册商标)等的无线通信或使用了线缆等的有线通信等而获取由跨骑型车辆sv的内部传感器检测出的跨骑型车辆sv的各数据。
[0052]
接着,对服务器装置20的结构进行说明。服务器装置20可以包括处理部21、存储部22(数据库)和通信部23。处理部21包括以cpu为代表的处理器、半导体存储器等存储设备、与外部设备的接口等。在存储部22中存储有处理器执行的程序、处理器在处理中使用的数据等,处理部21能够将存储于存储部22的程序读出到存储器等存储设备来执行。另外,通信部23经由网络ntw而与信息终端10能够通信地连接。具体而言,通信部23具有作为经由网络ntw从信息终端10接收信息的接收部的功能、和作为经由网络ntw向信息终端10发送信息的发送部的功能。
[0053]
在本实施方式的情况下,在服务器装置20(存储部22)中存储有从多个车辆分别获取到的行驶状态信息。行驶状态信息是指在各车辆中由传感器等在行驶中获取到的信息,例如,能够包含经时而相互关联后的位置信息、速度信息、倾斜信息以及abs工作信息。位置
信息是表示各车辆的位置的信息,可以包含位置数据。速度信息是表示各车辆的速度/加速度的信息,可以包含速度数据和加速度数据中的至少一个。倾斜信息是表示各车辆的倾斜的信息,可以包括倾斜数据、角速度数据以及角加速度数据中的至少一个。另外,abs工作信息是表示abs(antilock brake system:防抱死制动系统)进行了工作的信息。在此,作为获取行驶状态信息的多个车辆,不限于摩托车,也可以包括自行车、三轮车等跨骑型车辆以及四轮车辆。
[0054]
通过使用这样的行驶状态信息,能够确定各车辆发生紧急制动(急刹车)、危险避免行动、翻倒等的部位(场所)和/或低μ路的部位(场所)。作为一个例子,如图3所示,各车辆发生了紧急制动的部位能够根据从各车辆获取的位置信息、速度信息以及abs工作信息等来确定。各车辆发生了危险避免行动、翻倒的部位能够根据从各车辆获取到的位置信息以及倾斜信息等来确定。另外,低μ路的部位能够根据从各车辆获取到的位置信息以及abs工作信息等来确定。
[0055]
[信息终端中的处理]
[0056]
接着,对在执行信息提供程序时在信息终端10中进行的处理进行说明。图4是表示执行了信息提供程序时的由信息终端10的处理部11进行的处理的流程图。
[0057]
在s11中,处理部11(获取部11a)获取与跨骑型车辆sv的行进路径(行驶预定路线)相关的行进路径信息。例如,获取部11a将从驾驶员受理的目的地信息和由位置传感器16a检测出的当前位置信息发送到服务器装置20。在接收到目的地信息和当前位置信息的服务器装置20(处理部21)中,根据被存储于存储部22中的地图信息,计算(决定)对从跨骑型车辆sv的当前位置至目的地为止的行驶预定路线进行表示的信息作为行进路径信息。由此,获取部11a能够从服务器装置20获取行进路径信息。在此,在本实施方式中,由服务器装置20的处理部21计算行进路径信息,但不限于此,也可以由信息终端10的处理部11计算行进路径信息。
[0058]
在s12中,处理部11(确定部11b)在s11中所获取的跨骑型车辆sv的行进路径中,确定应促使驾驶员注意的注意部位。如上所述,在道路环境中,可能存在人孔、道路上的孔(凹凸)等对于四轮车辆而言影响小但对于跨骑型车辆而言影响大的构造物、状况。因此,本实施方式的处理部11(确定部11b)基于在s11中获取到的在跨骑型车辆sv的行进路径上过去行驶的车辆的行驶状态信息,将对于四轮车辆而言影响小但对于跨骑型车辆而言影响大的部位确定为注意部位。关于确定注意部位的具体的处理,在后面叙述。
[0059]
在此,处理部11(确定部11b)也可以在s12中确定进行了紧急制动(急刹车)的部位、低μ路的部位等在跨骑型车辆(两轮车辆)和四轮车辆中共同应提醒注意的注意部位。如上所述,这样的共同的注意部位能够基于过去在s11中获取到的跨骑型车辆sv的行进路径上行驶的车辆在该行进路径上的速度信息和/或abs工作信息等来确定。此外,以下,有时将过去在s11中获取到的跨骑型车辆sv的行进路径上行驶的车辆称为“参照车辆”。
[0060]
在s13中,处理部11判断在s12中是否确定了注意部位。在s12中确定了注意部位的情况下进入s14,在s12中未确定注意部位的情况下进入s15。
[0061]
在s14中,处理部11(通知部11d)将在s12中确定的注意部位通知给驾驶员。注意部位的通知可以通过在显示于显示部13(显示器)的跨骑型车辆sv的行进路径(行驶预定路线)上使用符号等重叠显示注意部位来进行,也可以通过从声音输出部14输出声音来进行。
另外,关于注意部位的通知,例如既可以在跨骑型车辆sv开始行驶之前通知全部注意部位,也可以按行驶中的跨骑型车辆sv接近的每个注意部位进行通知。作为后者的情况的一例,处理部11(通知部11d)也可以将在s12中确定的多个注意部位中的、与跨骑型车辆sv的距离为预定值以下的注意部位通知给驾驶员。在此,在本实施方式中,示出了将在s12中确定的注意部位通知给跨骑型车辆sv的驾驶员的例子,但不限于此,例如,也可以对接近注意部位的四轮车辆的驾驶员通知该注意部位。
[0062]
在s15中,处理部11判断是否结束信息提供程序。例如,处理部11在跨骑型车辆sv到达目的地的情况下、或从驾驶员接收到程序结束的指示的情况下、或由驾驶员按下了信息终端10的电源按钮的情况下等,能够判断为结束信息提供程序。在判断为结束信息提供程序的情况下,结束该程序,在判断为不结束信息提供程序的情况下,返回s11。
[0063]
[注意部位的确定处理]
[0064]
接着,对确定注意部位的处理(s12)进行说明。图5是表示在s12的步骤中进行的注意部位的确定处理的流程图。
[0065]
s12-1~s12-3是基于从参照车辆得到的倾斜信息来确定注意部位的步骤。在s12-1中,确定部11b(处理部11)从服务器装置20获取在s11中获取到的跨骑型车辆sv的行进路径上的参考车辆的倾斜信息。作为在本步骤中获取倾斜信息的参照车辆,能够选择跨骑型车辆。如上所述,倾斜信息可以包括倾斜数据(侧倾角数据)、角速度数据、角加速度数据等。在本步骤中,既可以在s11中所获取的跨骑型车辆sv的行进路径中,针对每个部分而获取不同的参照车辆的倾斜信息,也可以针对该行进路径中的相同部分而获取多个参照车辆的倾斜信息。在后者的情况下,在本步骤中获取到的多个参照车辆的倾斜信息能够在以下的步骤中平均化而使用。
[0066]
在s12-2中,确定部11b判断在s12-1中获取到的参照车辆的倾斜信息中是否存在参照车辆的倾斜变得异常的异常部位。在判断为在参照车辆的倾斜信息中存在异常部位的情况下进入s12-3,在判断为不存在异常部位的情况下进入s12-4。在s12-3中,确定部11b将在s12-2中决定的参照车辆的倾斜的异常部位确定为注意部位。
[0067]
例如,确定部11b能够在参照车辆的倾斜信息所包含的经时的倾斜数据中,将参照车辆的倾斜暂时(局部)变化的部位、参照车辆的倾斜示出异常的倾向的部位确定为注意部位(异常部位)。图6a~图6b以及图7a~图7b是表示根据过去在跨骑型车辆sv的行进路径上行驶的参照车辆的倾斜信息(经时的倾斜数据)来确定注意部位的例子的图。图6a~图6b表示根据作为行进路径的一部分的直线道路上的参照车辆的倾斜信息来确定注意部位的例子,图7a~图7b表示根据作为行进路径的一部分的弯道上的参照车辆的倾斜信息来确定注意部位的例子。图6a以及图7a表示例如存在人孔、凹凸等障碍物30的道路上的参照车辆的行驶路线31,图6b以及图7b表示该道路上的参照车辆的倾斜数据。
[0068]
如图6a以及图7a所示的行驶路线31那样,参照车辆以避开障碍物30的方式在道路上行驶,在该情况下,如图6b以及图7b所示,在避开障碍物30时,参照车辆的倾斜暂时变化(增加)。确定部11b能够将这样参照车辆的倾斜暂时变化的部位确定为注意部位(异常部位)。作为具体的处理,确定部11b通过基于行进路径的道路形状(例如道路的曲率)求出该行进路径上的参照车辆的适当倾斜度t0,能够将参照车辆的实际的倾斜度与适当倾斜度t0之差为预定值以上(阈值th1以上)的部位确定为注意部位。在此,在图6a~图6b以及图7a~
图7b中,示出了参照车辆的倾斜暂时增加的例子,但在参照车辆的倾斜暂时减少的情况下,也能够使用同样的处理来确定注意部位。
[0069]
s12-4~s12-7是基于作为参照车辆的跨骑型车辆与四轮车辆的行驶路线之差来确定注意部位的步骤。参照车辆的行驶路线信息能够基于从该参照车辆得到的位置信息(例如,经时的位置数据)来获取。
[0070]
在s12-4中,确定部11b从服务器装置20获取在s11中获取到的跨骑型车辆sv的行进路径上的参照车辆的行驶路线信息。作为在本步骤中获取行驶路线信息的参照车辆,能够选择跨骑型车辆以及四轮车辆。以下,有时将作为参照车辆的跨骑型车辆称为“参照两轮车辆”,将作为参照车辆的四轮车辆称为“参照四轮车辆”。另外,如上所述,行驶路线信息能够基于位置信息(经时的位置数据)来求出。在此,在本步骤中,在s11中所获取的跨骑型车辆sv的行进路径的各部分中,至少各获取一个参照两轮车辆的行驶路线信息以及参照四轮车辆的行驶路线信息。如果满足该条件,则在该行进路径中,可以针对每个部分使用不同的参照车辆的行驶路线信息,也可以针对该行进路径中的同一部分使用多个参照车辆的行驶路线信息。在后者的情况下,在本步骤中获取到的多个参照车辆的行驶路线信息能够在以下的步骤中平均化而使用。
[0071]
在s12-5中,确定部11b求出在s12-4中获取到的参照两轮车辆的行驶路线与参照四轮车辆的行驶路线的路线差。在s12-6中,确定部11b判断在s12-5中求出的路线差是否存在异常部位。在判断为存在异常部位的情况下进入s12-7,在判断为不存在异常部位的情况下结束s12的步骤。
[0072]
例如,确定部11b能够将在s12-5中求出的路线差暂时(局部)变化的部位、示出异常的倾向的部位确定为注意部位(异常部位)。图8a~图8b是表示根据过去在跨骑型车辆sv的行进路径上行驶的参照车辆(参照两轮车辆、参照四轮车辆)在该行进路径上的行驶路线信息(经时的位置数据)来确定注意部位的一例的图。图8a表示例如存在人孔、凹凸等障碍物30的道路上的参照两轮车辆的行驶路线31以及参照四轮车辆的行驶路线32,图8b表示该道路上的参照两轮车辆与参照四轮车辆的路线差。
[0073]
在图8a中,参照两轮车辆表示避开障碍物30那样的行驶路线31,与此相对,参照四轮车辆表示与障碍物30的存在无关的直线的行驶路线32。在该情况下,如图8b所示,通过参照两轮车辆中的障碍物30的避让动作,产生参照两轮车辆的行驶路线31与参照四轮车辆的行驶路线32的路线差暂时变化的部位,因此能够将该部位确定为注意部位(异常部位)。作为具体的处理,确定部11b能够将路线差的变化量成为预定值以上(阈值th2以上)的部位确定为注意部位(异常部位)。
[0074]
如上所述,在本实施方式中,基于过去在跨骑型车辆sv的行进路径上行驶的参照车辆的倾斜信息和/或行驶路线信息,确定应该促使驾驶员注意的注意部位。由此,能够将对于四轮车辆而言影响较小但对于跨骑型车辆sv而言影响较大的部位、即对于跨骑型车辆sv而言需要特别注意的部位通知给跨骑型车辆sv的驾驶员。因此,能够将对于跨骑型车辆sv而言有益的信息适当地通知给驾驶员。另外,通过使用过去行驶的参照车辆的倾斜信息,能够提高对于跨骑型车辆sv而言特别需要注意的部位的确定精度。
[0075]
《第二实施方式》
[0076]
对本发明的第二实施方式进行说明。本实施方式基本上延续第一实施方式。在本
实施方式中,在图4所示的流程图的s14的步骤中,处理部11(判断部11c)对在s12中所确定的注意部位处的对跨骑型车辆sv的影响度进行判断。而且,处理部11(通知部11d)根据由判断部11c判断出的对跨骑型车辆sv的影响度来变更通知方式。
[0077]
例如,判断部11c能够判断为,图6a~图6b、以及图7a~图7b所示的参照车辆的实际的倾斜度与适当倾斜度t0之差越大、和/或图8a~图8b所示的路线差越大,则注意部位处的对跨骑型车辆sv的影响度越大。另外,通知部11d能够根据由判断部11c判断出的影响度,变更显示部13中的注意部位的显示的颜色、大小。作为一例,通知部11d可以以由判断部11c判断出的影响度越大则驾驶员对注意部位的识别(关注度)越高的方式变更该注意部位的显示(通知方式)。由此,能够使驾驶员可靠地识别对跨骑型车辆sv的影响度比较高的注意部位,并且能够减少频繁地通知对跨骑型车辆sv的影响度比较低的注意部位的麻烦。
[0078]
本发明并不限定于上述的实施方式,能够在发明的主旨的范围内进行各种变形、变更。
[0079]
本技术在2020年3月9日提交的日本专利申请特愿2020-039905的基础上主张优先权,在此引用其记载内容的全部。
[0080]
【附图标记说明】
[0081]
10:信息终端;11:处理部;11a:获取部;11b:确定部;11c:判断部;11d:通知部;16:检测部;20:服务器(信息管理服务器);100:信息提供系统。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1