基于V2I的路侧感知系统对交通目标的感知测试方法与流程
:本发明属于车联网领域,具体涉及一种基于v2i的路侧感知系统对交通目标的感知测试方法。
背景技术
0、
背景技术:
1、车路协同是采用先进的无线通信和新一代互联网等技术,全方位实施车车、车路动态实时信息交互,并在全时空动态交通信息采集与融合的基础上开展车辆主动安全控制和道路协同管理,充分实现人车路的有效协同,保证交通安全,提高通行效率,从而形成的安全、高效和环保的道路交通系统。
2、路侧感知系统(roadside sensing system,rss)是支撑网联自动驾驶,提升交通运行效率、缓解拥堵的重要手段。通过rss系统为自动驾驶汽车提供超视距感知、盲区预警、驾驶意图等信息,是弥补单车自动驾驶感知局限的重要技术手段之一。
3、在车路协同应用中,路侧感知系统实现全局目标的实时矢量化和跟踪,其精准感知能力是路侧感知系统的关键。
4、基于此,现有技术中出现了多种用于评估路侧感知系统的性能的方案。
5、如公开号为cn114383649a的现有专利公开了一种基于高精度定位的路侧感知系统测试方法,包括有测试系统和路侧感知系统,测试系统包括有移动载体,测试系统以移动载体为参照获取交通参与者信息,并通过处理获取的交通参与者信息以输出交通参与者信息的参照状态信息;路侧感知系统获取到交通参与者的待测状态信息;将参照状态信息和待测状态信息进行对比分析,计算参照状态信息和待测状态信息之间的误差,根据计算出来的误差给出路侧感知系统的性能评估报告。
6、又如公开号为cn112816954a的现有专利公开了一种基于真值的路侧感知系统评测方法,包括以下步骤:建立真值感知设备组,在选定的测试时间区间,与待测的路侧感知系统rss的感知设备同步进行路侧感知数据采集;对真值感知设备组回传的原始数据进行处理,完成目标类型识别和目标轨迹识别,完成感知数据标注;基于已标注数据生成真值,真值数据包括交通参与者目标类型、位置、速度、加速度、轨迹;在所述选定的测试时间区间,比较待测rss输出的结构化感知数据和所述真值数据,输出感知性能的统计评测结果。
7、再如公开号为cn112382079a的现有专利公开了一种面向车路协同的路侧感知模拟仿真方法和系统,为路侧感知进行实际道路测试前提供一个虚拟环境进行仿真测试,借助仿真环境可以分析传感器实际安装前与环境之间的关系,可视化显示对应的工作效果,另外,通过仿真系统直接输出用于机器学习所需要的训练数据与测试数据。
8、上述专利均可对车路协同中路侧感知系统交通参与者感知能力进行测试评估,但其评估的对象是整体的交通参与者,包括有交通目标、交通事件、交通流等,并非专用于交通目标的感知能力评价。同时,上述专利也均是以常规的路侧感知系统测试方法为主,对不同路口类型、测试区域设计的考虑不细致和不完善。
技术实现思路
1、为解决上述问题,本发明的首要目的在于提供一种基于v2i的路侧感知系统对交通目标的感知测试方法,通过对不同路口类型、测试区域进行设计,以车载真值系统的数据作为基准,更加精准、全面的评价待测系统的对交通目标的运动学感知性能。
2、为实现上述目的,本发明的技术方案如下:
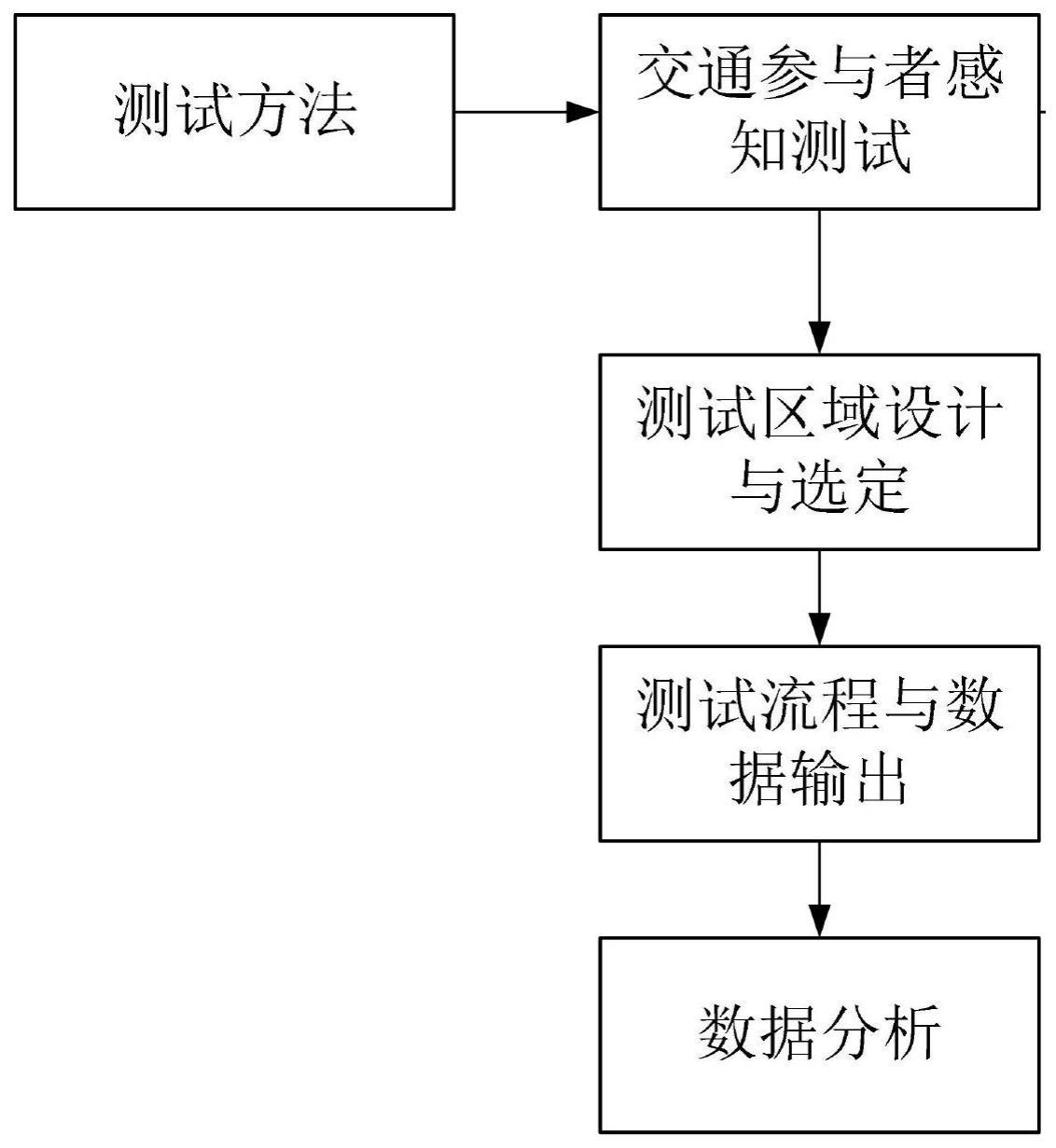
3、一种基于v2i的路侧感知系统对交通目标的感知测试方法,该感知测试方法包括以下步骤:
4、s1:测试区域设计与选定:根据测试场景的不同,将测试场景划分为长直道路和全息路口两类,并分别设定不同类型的测试区域,在测试区域内记录点位并标记序号;
5、s2:开启测试流程与数据采集:选定真值车在测试区域内进行行驶测试,真值车记录自车的真值数据,待测系统对测试区域的真值车进行目标感知,并输出结构化的感知数据;
6、s3:进行测试数据分析评测。
7、进一步地,所述步骤s1中的长直道路又称为“普通路口”。
8、进一步地,所述步骤s1中,长直道路设定的测试区域为四边形区域,记录6个点位并标记序号,包含矩形顶点4个和截面点2个;矩形区域分两种,一种以道路边界作为区域边界,即包含全部车道,另一种测试区域仅包含部分车道。
9、进一步地,所述步骤s1中,全息路口设定的测试区域为十字形区域,记录32个点位并标记序号。考虑到实际路口建设情况,这些点位记录的数量可自行确定,如果单独设定截面需要额外再记录8个点位。
10、进一步地,所述步骤s2包括有:
11、步骤s21:确定测试区域的范围。按照“东南-东-东北-北-西北-西-西南-南-东南”的顺序记录每个点位的经纬信息;
12、步骤s22:选定真值车进行测试,人工测量真值车的尺寸大小,输出真值车长、宽、高的值;
13、步骤s23:选定一个待测系统感知范围之外的地方作为真值车的起点,真值车从起点出发测试并记录自车行驶的真值数据;
14、步骤s24:真值车以正常城市交通行驶速度行驶,沿车道从入口方向进入,并经过划定的测试区域;
15、步骤s25:真值车离开测试区域,并停止自车的真值数据采集;
16、步骤s26:若测试区域内包含转弯道路,则重复s23-s25,直到遍历完成所有车道,且沿着车道规则完成路线行驶(即直行道直行,转弯道则转弯,若该车道同时可直行和转弯,则先进行直行,下一次测试再执行转弯);
17、若测试区域内仅只有直行道,则重复步骤s23-s25,直到遍历完成所有车道后,再额外进行重复至少2次步骤s23-s25,并要求在额外重复的步骤s24中真值车以曲线“s形”行驶,且跨越至少2个车道的运动方式经过测试区域;在本技术中,真值车以曲线“s形”行驶重复步骤s23-s25,保证在长直道路的测试场景中,也能够采集到车辆转弯的数据,保证采集的数据的完整。
18、步骤s27:对真值车采集的真值数据以及待测系统对真值车的感知数据进行处理,输出时间戳,及时间戳对应的车辆信息,真值车输出的真值数据为sgt,待测系统输出的待测数据为sdut,sdut中的内容仅包含对真值车进行感知的数据。
19、进一步地,步骤s23中,真值车在待测系统感知范围外,要求与待测系统位置的距离在400米以上。
20、进一步地,步骤s24中,真值车的行驶速度为20-60km/h。
21、进一步地,步骤s25中,真值车离开测试区域后,需额外再行驶一段至少150米的距离,再停止自车的数据采集,以保证真值数据的完整。
22、进一步地,步骤s27中,车辆信息包括有目标物经、纬度、高程,尺寸等信息。
23、进一步地,所述步骤s3包括有:
24、s31:统一路侧真值系统与待测系统的定位参考点;
25、s32:以全部测试数据中的经纬度信息和测试区域的经纬度信息为依据,筛选出所有在测试区域范围内的数据,作为有效评测数据;
26、s33:在s32中筛选出的有效数据中,将待测数据sdut和真值数据sgt进行关联,建立关联关系;
27、s34:以s33中建立关联关系后的数据为基础,对于sdut中的每一个点,在sgt中找到与之时间相同的点,计算每个点对位置之间的欧氏距离,并最终取平均值作为定位误差;同理,计算每个点对的速度差值的绝对值,并最终取平均值作为测速误差;计算每个点对的航向角的差值绝对值,并最终取平均值作为航向角检测误差;每个点对的三维尺寸长、宽、高误差,并最终取平均值作为尺寸检测误差;
28、s35:统计所有测试轮次的误差计算结果,设定定位误差、速度误差、航向角误差、尺寸检测误差各项的阈值,当满足有效性的条件时,则确认该轮次的误差计算结果有效,否则该轮次数据无效;
29、s36:基于各个测试轮次的有效误差计算结果,每项指标再次进行平均即求得最终的系统的定位精度、速度精度、航向角精度、尺寸检测精度。
30、进一步地,所述定位参考点即局部切平面坐标系的原点,用于确定对真值车的坐标位置。
31、进一步地,全部测试数据包括有测试区域内和测试区域外的数据。
32、进一步地,在步骤s33中,对数据进行关联的方式包括有两种,分别为:
33、数据关联方式1:在有效评测数据中,以待测数据sdut中的每一个时间戳为基准,对真值数据sgt作插值处理,使得对于sdut中的每一点都可在sgt中找到与之时间相同的位置点,从而建立待测数据sdut和真值数据sgt的关联关系;
34、数据关联方式2:在有效评测数据中,以待测数据sdut中的每一个时间戳为基准,对真值数据sgt中的时间戳进行纵向搜索,然后取相差最小值,即最相邻时间戳,最终将真值数据sgt和待测数据sdut形成基于时间戳的关联关系。
35、进一步地,步骤s34中,定位误差的计算公式为:
36、式中:
37、i——待测系统输出数据中的帧;
38、pi——待测系统中第i帧的二维平面位置向量;
39、——真值车第i帧在二维平面中的位置向量;
40、||·||——欧氏距离;
41、m——统计时间内待测系统检测到的样本总量。
42、速度误差的计算公式为:
43、式中:
44、i——待测系统输出数据中的帧;
45、vi——待测系统在第i帧的速度;
46、——真值车第i帧的速度;
47、m——统计时间内待测系统检测到的样本总量。
48、航向角误差的计算公式为:
49、式中:
50、i——待测系统输出数据中的帧;
51、αi——待测系统在第i帧的航向角;
52、——真值车第i帧的航向角;
53、m——统计时间内待测系统检测到的样本总量。
54、尺寸检测误差的计算公式为:真值车的真实尺寸经测量为lz(长),wz(宽)和hz(高),待测系统感知后的输出值为li,wi和hi,则尺寸检测精度为:
55、ed=mean((|li-lz|+|wi-wz|+|hi-hz|)/3))
56、式中:
57、i——待测系统输出数据中的帧;
58、mean(·)——统计时间内待测系统检测到的样本数据求平均数。
59、进一步地,s35中的有效性的判断条件包括有:
60、定位误差的计算结果有效性条件为:任意测试轮次中连续10帧数据的定位误差≤定位误差阈值,阈值默认为1.5m,如不满足,则以阈值以0.25m增加,直到阈值等于5m时终止;
61、速度误差的计算结果有效性条件为:任意测试轮次中连续10帧数据的速度误差≤速度误差阈值,阈值默认2m/s;
62、航向角误差的计算结果有效性条件为:任意测试轮次中连续10帧数据的航向角误差≤航向角误差阈值,阈值默认10°;
63、尺寸检测误差的计算结果有效性条件为:任意测试轮次中连续10帧数据的尺寸检测误差≤尺寸检测误差阈值,阈值默认1m。
64、相比于现有技术,本发明的有益效果是:通过对不同路口类型、测试区域进行设计,以车载真值系统的数据作为基准,对道路中的交通目标(如机动车、非机动车、行人)进行感知,能够从定位、速度、航向角、尺寸检测四个方面评价待测系统的运动学感知性能,更加全面、精准。
- 还没有人留言评论。精彩留言会获得点赞!