一种基于机器视觉的鱼塘防盗系统及其控制方法
本发明涉及计算机视觉,更具体地说,涉及一种基于机器视觉的鱼塘防盗系统及其控制方法。
背景技术:
1、随着时代的发展,越来越多人开始了水产品养殖,身边随处可见的鱼塘当下都成了私人的养殖区域,但这些鱼塘也面临着鱼被偷的问题。目前市场上的鱼群驱赶装置一来需要一直开着,这样浪费了水域资源,另一方面在浪费电力资源的同时也带来了扰民等问题。
2、如专利申请号为201921055245.9的一种鱼塘养殖用多功能监测装置,其公开了一种鱼塘养殖用多功能监测装置,包括太阳能电池、有线红外线报警器、计数器、时间控制器、gprs模块、短信模块、锂蓄电池、设备箱、水位监测设备、氧气监测设备、电源开关,每两套红外线报警器为一组,鱼塘四周每一边的左右两端安装一组红外线报警器,设备箱安装在池塘周围,太阳能电池安装在设备箱上,水位监测设备的探头、养殖用氧气监测设备的探头投入池塘水中,计数器、时间控制器、gprs模块、短信模块、锂蓄电池、水位监测设备本体、养殖用氧气监测设备本体、电源开关安装在设备箱内并和太阳能电池经导线连接。本新型能有效监测是否有偷鱼行为的发生,以及监测进入鱼塘内小动物的情况,还具有水位监测以及水含氧量实时监测功能。其通过红外传感器进行偷鱼行为的识别,这种识别方式错误率较高,仅仅是监控到可能的行为而进行报警,无法对鱼群进行任何操作,这种偷鱼行为的防盗策略无法满足用户的实际需求。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种基于机器视觉的鱼塘防盗系统及其控制方法,利用摄像头做监测系统,通过adaboost算法进行捕鱼行为逻辑筛选。该发明将检测算法与相机结合起来对各方位的鱼群驱赶器进行合理的控制,从而做到鱼塘防盗。
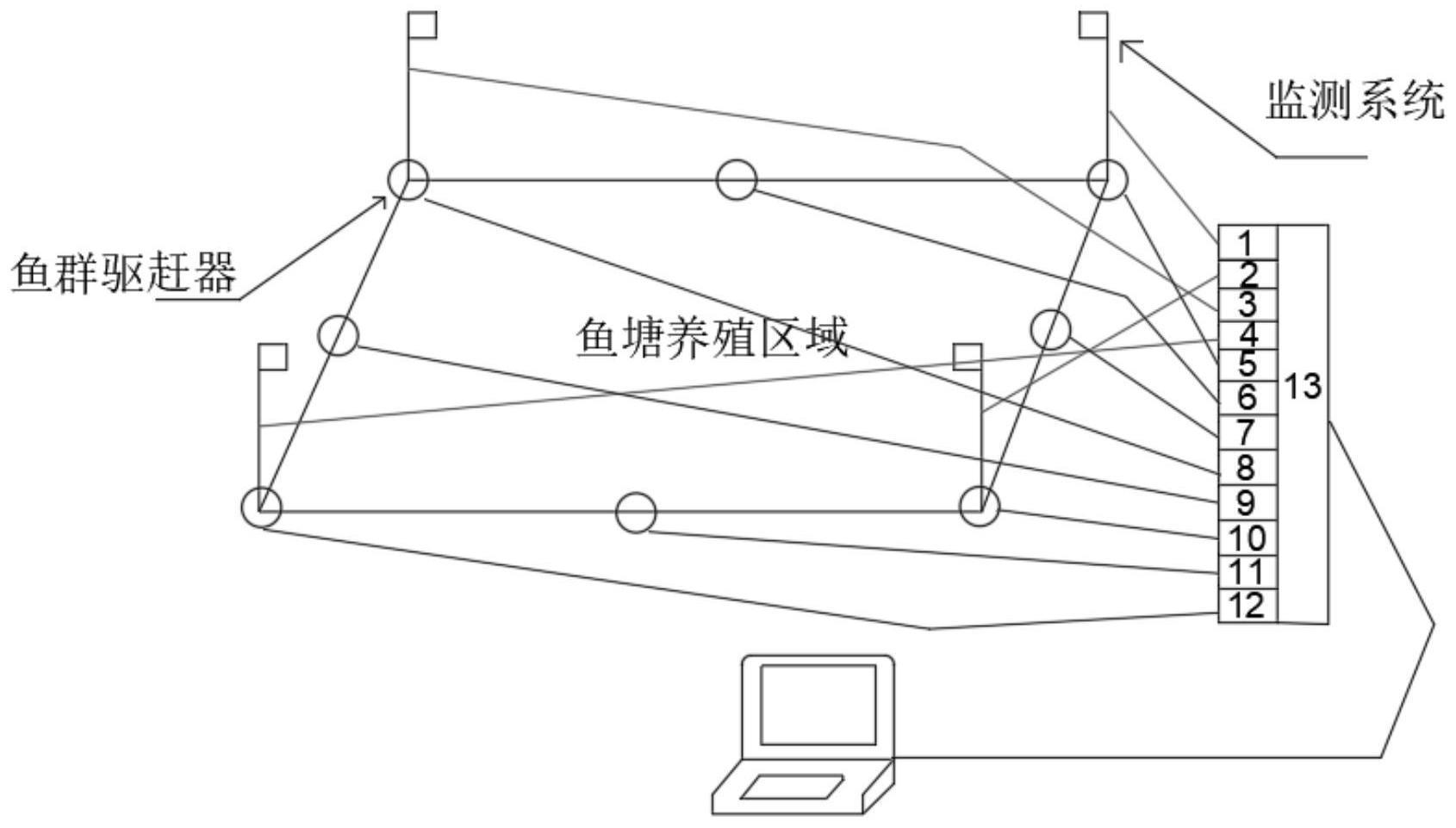
2、为了实现上述目的,本发明采用的技术方案为:一种基于机器视觉的鱼塘防盗系统,包括监控系统、计算机控制系统、鱼群干扰系统,所述监控系统布置在鱼塘边缘处用于采集鱼塘表面和岸边图像,其输出端连接计算机控制系统;所述计算机控制系统对图像中人的行为特性进行识别并基于识别的结果对鱼群干扰系统进行控制。
3、所述鱼群干扰系统包括多个鱼群干扰器,分别设置在鱼塘边缘或内部,用于启动对鱼群的干扰以驱赶鱼群。可使用当下已经投入量产的电子脉冲驱鱼器进行驱赶鱼群,根据其设计原理可以每隔50米安放一台,再根据中央控制器判断哪一台驱鱼器需要启动并给予触发脉冲,当捕鱼人远离时,中央控制器再给启动的驱鱼器一个脉冲信号进行关断。
4、所述监测系统包括多个图像采集模块,所述图像采集模块通过api接口将图像信息上传至计算机控制系统中。
5、一种基于机器视觉的鱼塘防盗系统的控制方法,所述方法包括如下步骤:
6、步骤1:获取鱼塘的监控图像;
7、步骤2:对图像进行预处理;
8、步骤3:采用预先训练的分类器网络对图像进行分类得到分类结果;其中分类器网络由多个分类器组成,所述分类器由adaboost算法学习训练得到;
9、步骤4:基于分类结果判断是否启动鱼群干扰器对鱼群进行驱赶。
10、步骤1包括:通过设置在鱼塘周围的多个图像采集模块进行鱼塘周围及水面图像进行采集。
11、步骤2中的图像预处理包括:
12、步骤21:对图像进行中值滤波,滤除图像中的噪声及干扰;
13、步骤22:图像灰度化处理;
14、步骤23:采用sobe l算子进行对图像进行处理;
15、步骤24:对步骤23处理后的图像进行处理,将图像与背景分开;
16、步骤25:将图像进行拼接和融合得到完整的鱼塘图像。
17、步骤24中采用codebook算法进行图像背景分割处理。
18、步骤25中采用surf算法进行图像的拼接并采用加权融合方法进行拼接处的平滑过渡处理。
19、采用adaboost算法训练分类器网络包括:
20、首先需要初始化训练数据的权值分布;如果有n个样本。则每一个训练样本最开始时都被赋予相同的权重:1/n。
21、
22、其次训练弱分类器:使用具有权值分布dm的训练数据集学习,得到基本分类器:
23、gm(x):χ→{-1,+1}
24、具体训练过程中,如果某个样本点一经被准确地分类,那么在构造下一个训练集中,它的权重就被降低;相反,如果某个样本点没有被准确地分类,那么它的权重就得到提高;然后,权重更新过的样本集被用于训练下一个分类器,整个训练过程如此迭代地进行下去;将各个训练得到的弱分类器组合成强分类器;各个弱分类器的训练过程结束后,加大分类误差率小的弱分类器的权重,使其在最终的分类函数中起着较大的决定作用,而降低分类误差率大的弱分类器的权重,使其在最终的分类函数中起着较小的决定作用;即误差率低的弱分类器在最终分类器中占的权重较大;否则较小;组合各个弱分类器:
25、
26、从而得到最终分类器:
27、
28、本发明的优点在于:对摄像头收集到的人的行为特征等信息进行分析处理,判断当前是否有人在捕鱼或钓鱼,进而控制鱼群干扰器的开通与关断。这样做不仅起到了鱼群防偷的效果,还做到了不扰民,节约电力资源,充分利用水域饲养鱼群。采用adaboost算法进行分类器训练,对图像中的人的行为的识别更为准确可靠,使得整个系统的鱼群驱赶更加准确。
29、通过定制化图像识别进行模型训练,并将模型上线到平台,在实际运行中,系统对摄像头收集到的人的行为特征等信息进行分析处理,判断当前是否有人在捕鱼或钓鱼,进而控制鱼群干扰器的开通与关断。这样做不仅起到了鱼群防偷的效果,还做到了不扰民,节约电力资源,充分利用水域饲养鱼群。
技术特征:
1.一种基于机器视觉的鱼塘防盗系统,其特征在于:包括监控系统、计算机控制系统、鱼群干扰系统,所述监控系统布置在鱼塘边缘处用于采集鱼塘表面和岸边图像,其输出端连接计算机控制系统;所述计算机控制系统对图像中人的行为特性进行识别并基于识别的结果对鱼群干扰系统进行控制。
2.如权利要求1所述的一种基于机器视觉的鱼塘防盗系统,其特征在于:所述鱼群干扰系统包括多个鱼群干扰器,分别设置在鱼塘边缘或内部,用于启动对鱼群的干扰以驱赶鱼群。
3.如权利要求1或2所述的一种基于机器视觉的鱼塘防盗系统,其特征在于:所述监测系统包括多个图像采集模块,所述图像采集模块通过api接口将图像信息上传至计算机控制系统中。
4.如权利要求1-3任一所述的一种基于机器视觉的鱼塘防盗系统的控制方法,其特征在于:所述方法包括如下步骤:
5.如权利要求4所述的一种基于机器视觉的鱼塘防盗系统的控制方法,其特征在于:步骤1包括:通过设置在鱼塘周围的多个图像采集模块进行鱼塘周围及水面图像进行采集。
6.如权利要求4所述的一种基于机器视觉的鱼塘防盗系统的控制方法,其特征在于:步骤2中的图像预处理包括:
7.如权利要求6所述的一种基于机器视觉的鱼塘防盗系统的控制方法,其特征在于:步骤24中采用codebook算法进行图像背景分割处理。
8.如权利要求6所述的一种基于机器视觉的鱼塘防盗系统的控制方法,其特征在于:步骤25中采用surf算法进行图像的拼接并采用加权融合方法进行拼接处的平滑过渡处理。
9.如权利要求1-8任一所述的一种基于机器视觉的鱼塘防盗系统的控制方法,其特征在于:采用adaboost算法训练分类器网络包括:
技术总结
本发明公开了一种基于机器视觉的鱼塘防盗系统即方法,其中包括监控系统、计算机控制系统、鱼群干扰系统,所述监控系统布置在鱼塘边缘处用于采集鱼塘表面和岸边图像,其输出端连接计算机控制系统;所述计算机控制系统对图像中人的行为特性进行识别并基于识别的结果对鱼群干扰系统进行控制。本发明通过机器视觉识别鱼塘周围人的行为并基于行为是否偷鱼来驱动干扰器,可以避免偷窃成功的可能性,效果显著。
技术研发人员:吴玉秀,凌新宇,郝志朝,方辉,陆向园,朱方敏
受保护的技术使用者:安徽工业大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!