一种电单车逆行检测方法及电单车与流程
本发明涉及电单车,尤其涉及一种电单车逆行检测方法及电单车。
背景技术:
1、随着社会的进步,人们的绿色出行意识逐渐增强,共享电单车应运而生,电单车出行具有轻巧、方便、快捷、便宜等特点,已经成为人们出行的重要组成部分。
2、然而,在日常出行过程中频繁出现共享电单车逆行的现象,共享电单车的逆行严重影响了机动车的道路交通安全,增加了交通事故发生的可能性,同时给骑行者的生命财产安全带来极大的安全隐患。目前,现有技术中针对电单车的逆行检测缺乏行之有效的检测手段,导致交通安全无法保证。
3、鉴于此,有必要提出一种电单车逆行检测方法及电单车以解决或至少缓解上述缺陷。
技术实现思路
1、本发明的主要目的在于提供一种电单车逆行检测方法及电单车,以解决现有技术针对电单车的逆行检测缺乏行之有效的检测手段,导致交通安全无法保证的问题。
2、为实现上述目的,本发明提供了一种电单车逆行检测方法,包括步骤:
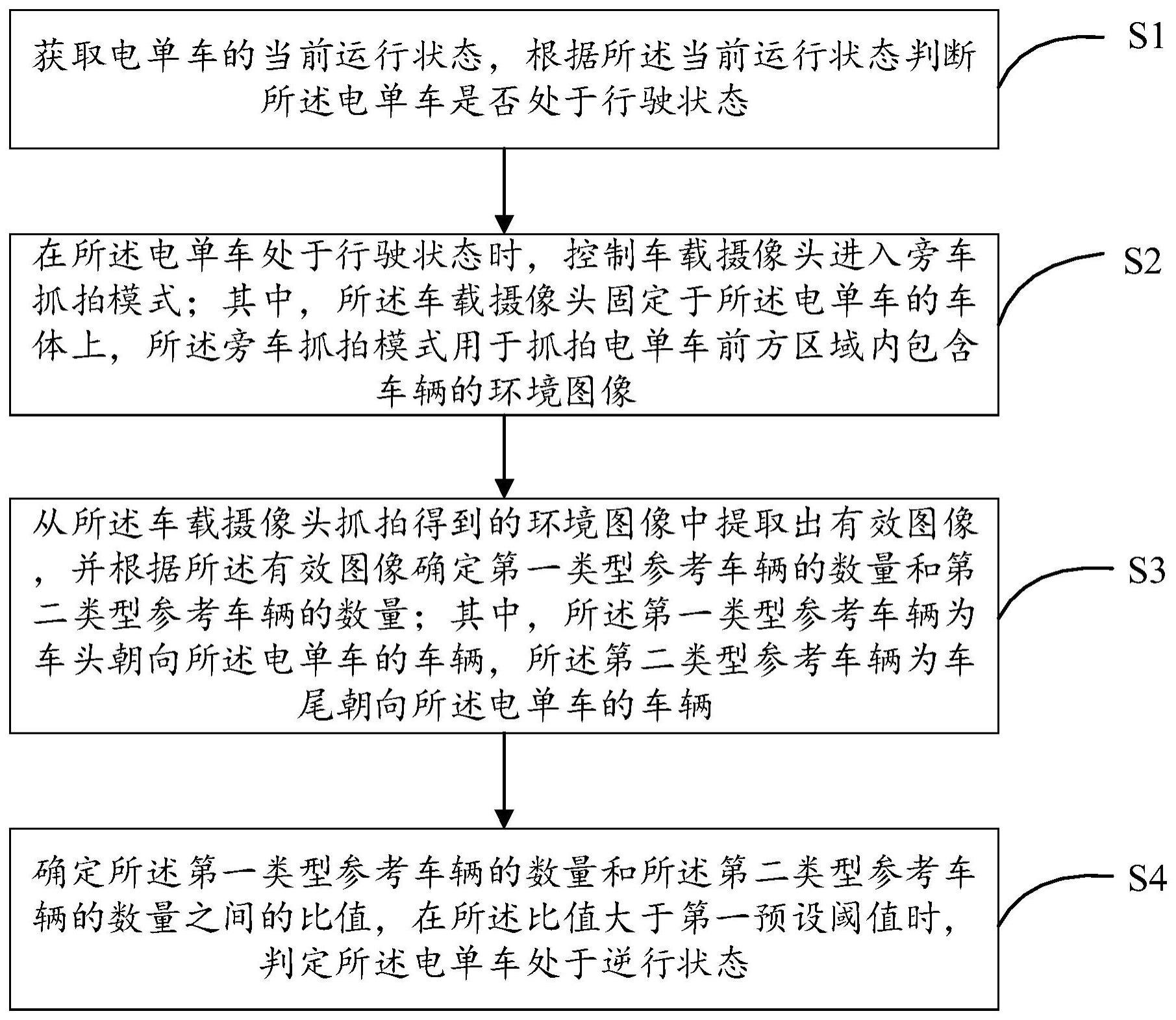
3、s1,获取电单车的当前运行状态,根据所述当前运行状态判断所述电单车是否处于行驶状态;
4、s2,在所述电单车处于行驶状态时,控制车载摄像头进入旁车抓拍模式;其中,所述车载摄像头固定于所述电单车的车体上,所述旁车抓拍模式用于抓拍电单车前方区域内包含车辆的环境图像;
5、s3,从所述车载摄像头抓拍得到的环境图像中提取出有效图像,并根据所述有效图像确定第一类型参考车辆的数量和第二类型参考车辆的数量;其中,所述第一类型参考车辆为车头朝向所述电单车的车辆,所述第二类型参考车辆为车尾朝向所述电单车的车辆;
6、s4,确定所述第一类型参考车辆的数量和所述第二类型参考车辆的数量之间的比值,在所述比值大于第一预设阈值时,判定所述电单车处于逆行状态。
7、优选地,所述步骤s3具体包括步骤:
8、s31,判断所述环境图像中是否具有道路边缘线,在所述环境图像中具有所述道路边缘线时,确定所述电单车和距离所述电单车最近的道路边缘线作为目标道路边缘线,并确定所述目标道路边缘线和所述电单车之间的横向距离;
9、s32,在所述横向距离小于预设距离时,获取当前时刻所述电单车所在车道的单向总宽度;以及获取在当前时刻之前的预设时长内所述电单车的历史位置数据集,根据所述历史位置数据集确定出所述电单车在当前时刻的矢量行驶路径;
10、s33,以当前时刻对应的矢量行驶路径作为中心线将所述有效图像划分成靠近所述目标道路边缘线的第一区域和远离所述目标道路边缘线的第二区域;其中,所述第一区域的横向宽度为所述横向距离,所述第二区域的横向宽度为所述单向总宽度与所述横向距离之差;
11、s34,标定所述第一区域的权重为k0,以及以当前时刻对应的矢量行驶路径为基准沿道路横向从近到远将所述第二区域依次划分为n个子区域;其中,第1个子区域的权重为k1,第i个区域的权重为ki,第n个子区域的权重为kn,k1≥ki≥kn;1≤i≤n,i和n均为正整数;
12、s35,分别确定所述第二区域中每个子区域和所述第一区域内的第一类型参考车辆的实际数量以及第二类型参考车辆的实际数量;
13、s36,根据所述第一区域和所述第二区域中每个子区域的第一类型参考车辆的数量、第二类型参考车辆的数量以及对应的权重确定出所述有效图像中第一类型参考车辆的加权平均数量以及第二类型参考车辆的加权平均数量,并将所述第一类型参考车辆的加权平均数量作为所述第一类型参考车辆的数量,以及将第二类型参考车辆的加权平均数量作为所述第二类型参考车辆的数量。
14、优选地,所述步骤s4之后还包括步骤:
15、s51,在所述比值小于或等于第一预设阈值时,将当前时刻作为统计初始时刻获取从所述统计初始时刻开始后的预设时长内所述车载摄像头抓拍得到的所有环境图像;
16、s52,从每张所述环境图像中提取出有效图像,并归集所述预设时长内的所有有效图像得到有效图像集;
17、s53,确定所述有效图像集中的第一类型参考车辆的数量和所述第二类型参考车辆的数量的比值,并判断所述比值是否大于所述预设阈值;
18、s54,在所述比值大于所述第一预设阈值时,判定所述电单车处于逆行状态,执行预设的报警指令;在所述比值小于第二预设阈值时,判定所述电单车处于正常行驶状态,维持所述电单车的当前状态;其中,第二预设阈值小于第一预设阈值;
19、s55,在所述比值小于或等于所述第一预设阈值时,获取当前时刻之后预设延时步长内所述车载摄像头抓拍得到的所有环境图像,从每张所述环境图像中提取出有效图像,归集所述统计初始时刻到所述预设步长结束时刻之间所有有效图像得到中间有效图像集,并将所述中间有效图像集作为所述有效图像集,然后进入步骤s53。
20、优选地,所述步骤s4中的“预设阈值”通过如下步骤得到:
21、s41,获取当前时刻下所述电单车所处车道的实时车流量;
22、s42,根据预设的流量阈值算法确定所述预设阈值。
23、优选地,所述预设的流量阈值算法包括:所述预设阈值和所述实时车流量成正比。
24、优选地,所述步骤s4之后还包括步骤:
25、s6,从所述有效图像中提取出所述第二类型参考车辆的图像作为报警图像,并将所述报警图像发送给预设对象。
26、优选地,所述步骤s32中的“单向总宽度”,通过如下步骤得到:
27、获取电单车的当前位置,根据所述当前位置确定所述单向总宽度。
28、本发明还提供一种电单车,包括车体,还包括设于所述车体上的车载摄像头和控制系统,其中,所述车载摄像头固定于所述电单车的车体上,所述旁车抓拍模式用于抓拍电单车前方区域内包含车辆的环境图像;所述车载摄像头与所述控制系统连接,所述控制系统包括存储器、处理器、以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述的电单车逆行检测方法的步骤。
29、本发明还提供一种存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述的电单车逆行检测方法的步骤。
30、与现有技术相比,本发明具有如下的有益效果:
31、本发明提供一种电单车逆行检测方法及电单车,通过获取电单车的当前运行状态,根据当前运行状态判断电单车是否处于行驶状态,在电单车处于行驶状态时,控制车载摄像头进入旁车抓拍模式,从车载摄像头抓拍得到的环境图像中提取出有效图像,并根据有效图像确定第一类型参考车辆的数量和第二类型参考车辆的数量,第一类型参考车辆为车头朝向电单车的车辆,第二类型参考车辆为车尾朝向电单车的车辆,确定第一类型参考车辆的数量和第二类型参考车辆的数量之间的比值,在比值大于预设阈值时,判定电单车处于逆行状态。本技术通过确定第一类型参考车辆的数量和第二类型参考车辆的数量之间的比值,能够准确检测出电单车是否处于逆行状态。通过对有效图像按照当前时刻对应的矢量行驶路径进行分区域划分,分别确定出每个子区域的车辆数量得出最终的加权平均数量作为比值计算值,这种方式能够有效提高检测的准确度。通过引入延时循环判断,即在比值小于或等于预设阈值时,适当延长检测的时长直到检测出电单车是否处于逆行状态。
- 还没有人留言评论。精彩留言会获得点赞!