考虑时变交通流量的路网交通子区动态划分方法及系统
本发明涉及智能交通,尤其涉及一种考虑时变交通流量的路网交通子区动态划分方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、城市道路承载的交通负荷和交通压力日益剧增,进而引发诸如交通拥堵、交通事故、空气污染、燃油消耗、噪声污染等交通问题,严重影响出行效率和经济发展。
3、由于城市区域中的路网规模庞大、结构复杂,交通流量具有随机性、动态性、多样性,直接对区域路网进行信号控制研究非常困难,难以提高整体路网的运行效率。因此根据交通流运行态势及子区划分需要满足的同质性、连通性、数量适中、面积适中等原则,将整个城市区域路网划分为若干个不同的交通控制子区,通过对每个子区进行协调控制以降低整个区域控制的复杂度,提高区域路网的通行能力和服务水平。
4、目前对交通子区划分的方法主要有静态子区划分和动态子区划分两种。静态子区划分对控制区域中的所有交叉口进行划分并保持划分方案固定不变。随着路网交通状态变化,静态子区划分难以满足实时变化的交通需求,从而影响路网区域协调控制效果。相比之下,采用动态子区划分进行路口划分能更好地适应交通流量变化,根据区域内交通流量的变化进行自适应子区划分调整以满足区域交通运行规律的变化。
5、在子区划分过程中,影响交通子区划分的因素有道路类别、道路等级、路网结构、区域范围、道路功能、相邻交叉口间距等静态因素和相邻交叉口交通流量、信号周期、相位相序、行驶时间、车流离散性、车流密度、车队长度等动态因素。其中相邻交叉口的交通流量、路网结构、信号周期对子区划分影响重大。
6、相邻交叉口之间的流量直观反映交叉口的交通状态和相似程度,相邻路口的关联度与交通流量成正比例。当相邻交叉口的流量较大时,交通流量呈现连续性,交通状态具有同质性,应划入同一子区;当相邻交叉口的流量较小时,交通流量呈现离散性,各交叉口独立运行,交通状态相互影响较弱,应划入不同子区。
7、当两个路段具有相同的结构时,车辆的运行模式和交通状态较为相似,相邻交叉口具有较大的关联度。相邻交叉口之间的距离反映了上下游交叉口的容量大小,相邻交叉口的关联度与路段长和车道数成反比关系。根据美国《交通控制系统手册》,当路网内相邻交叉口的空间距离超过800米时,应划入不同的控制子区。相邻交叉口间距离太大时,相邻交叉口间的交通流量随着行驶距离增加表现出离散状态;当相邻交叉口间的距离较小时,两个交叉口的交通状态互相影响,呈现连续性。当两个路段长度相等时,其中一条路段包含更多的车道数,其道路承载能力更高且发生交通拥堵的概率较低,对其他交叉口的运行影响较小,因而不能划入同一子区。
8、信号周期是交通流重要参数之一,对决定子区控制效果具有重要影响。协调控制的相邻交叉口的信号周期一般相同或者呈现整数倍关系以保证相邻交叉口产生稳定的相位差,此时相邻交叉口的相似度较大,应划入同一控制子区。当相邻交叉口信号周期长度差值较大且无明显的倍数关系时,难以确定合适的协调控制信号周期,路口关联度较小,应划入不同控制子区。
9、经研究发现,目前对城市交通路网采用动态子区划分算法的研究较少,现有研究所选用的关联度模型未考虑交通密度的影响且大多采用静态子区划分,未能根据预测流量进行动态子区划分以适应交通状态变化。
技术实现思路
1、为了解决上述背景技术中存在的技术问题,本发明提供一种考虑时变交通流量的路网交通子区动态划分方法及系统,其通过建立基于流量关联系数、密度关联系数、信号周期关联系数的交叉口关联度模型;对newman社团划分算法进行改进以适应无向有权路网;结合交叉口之间的距离原则提出城市路网交通子区动态划分方法,实现了对路网区域的划分研究。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明的第一个方面提供一种考虑时变交通流量的路网交通子区动态划分方法。
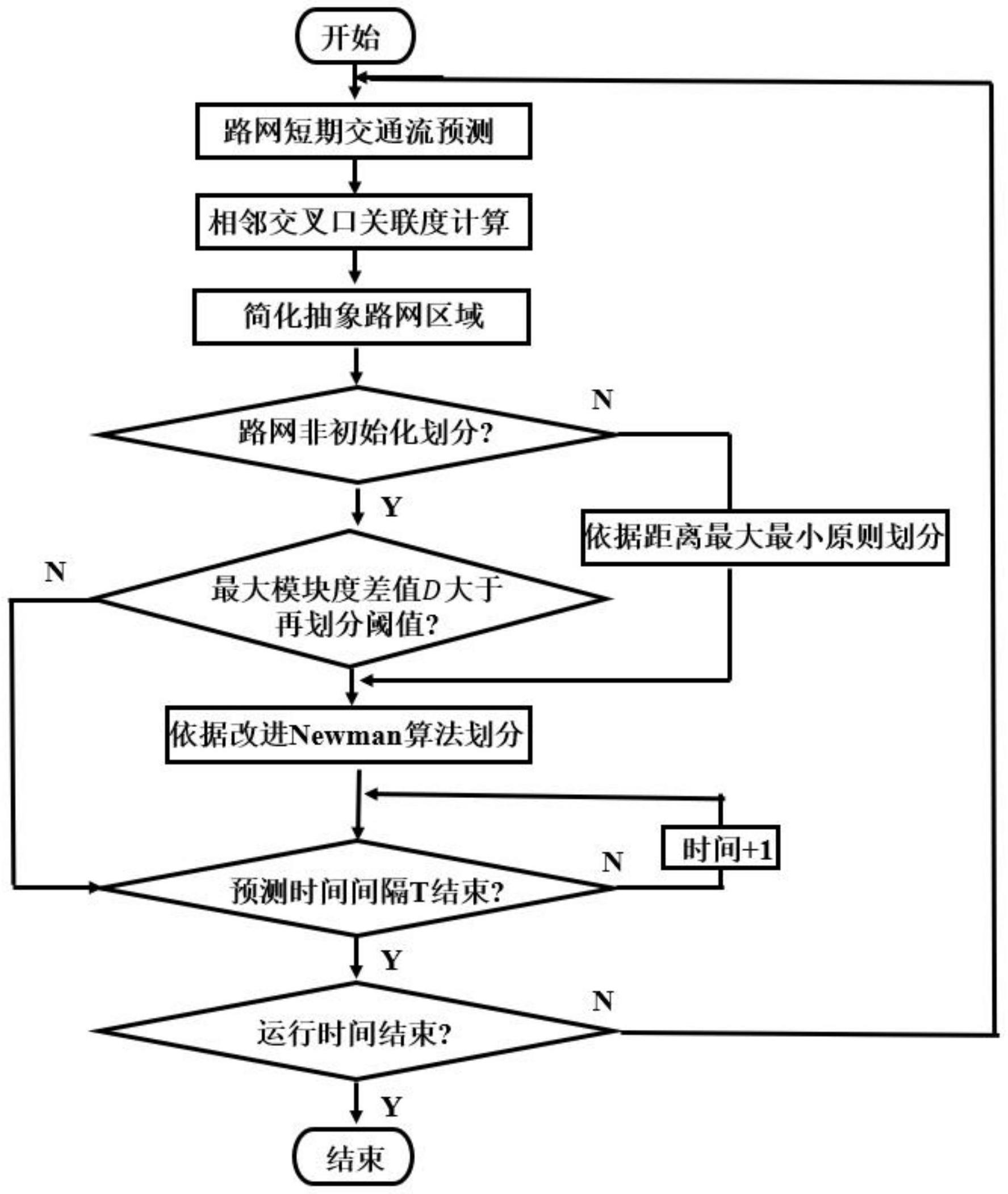
4、考虑时变交通流量的路网交通子区动态划分方法,包括:
5、构建交通路网拓扑图;
6、预测各个交叉口未来一段时间内的交通流量,以计算各个交叉路口的关联度值;
7、依据各个交叉路口的关联度值,对交通路网拓扑图进行初步划分,得到若干个子区;
8、在下一个时间预测段,依据更新预测的交通流量,计算各个交叉口的新关联度值;
9、依据各个交叉口的新关联度值,对若干个子区进行合并,计算最大模块度值;根据前后两次最大模块度差值与再划分阈值的关系,对区域进行动态划分和重新调整;
10、以模块度最大值位置处为最优的子区划分个数,对交通路网拓扑图的子区域进行动态划分。
11、进一步地,所述构建路网拓扑图的过程包括:将交叉口抽象为节点,交叉口间的路段抽象为边,对节点和边进行编号,并获取边与边之间的距离信息,构建路网拓扑图。
12、进一步地,所述预测各个交叉口未来一段时间内的交通流量的过程包括:
13、获取各个交叉口的当前交通流量数据,将所述当前交通流量数据在时间特性上按照邻近性、阶段性和趋势性进行分片处理,得到邻近性时间序列集合、阶段性时间序列集合和趋势性时间序列集合;
14、基于邻近性时间序列集合、阶段性时间序列集合和趋势性时间序列集合,采用深度卷积门控网络预测模型,得到各个交叉口未来一段时间内的交通流量。
15、更进一步地,所述采用深度卷积门控网络预测模型的过程包括:
16、对邻近性时间序列集合、阶段性时间序列集合和趋势性时间序列集合均进行融合外部因素处理,得到邻近性时间序列交通流特征矩阵、阶段性时间序列交通流特征矩阵和趋势性时间序列交通流特征矩阵;
17、将邻近性时间序列交通流特征矩阵、阶段性时间序列交通流特征矩阵和趋势性时间序列交通流特征矩阵进行加权融合,得到融合交通流特征矩阵;
18、将融合交通流特征矩阵通过梯度反向传播和adam优化算法,得到各个交叉口未来一段时间内的交通流量。
19、进一步地,所述各个交叉路口的关联度值通过交叉口关联度模型得到,所述交叉口关联度模型为:
20、
21、式中,iq(a,b)为交叉口a与交叉口b的流量关联度,ic(a,b)为交叉口a与交叉口b的信号周期关联度,iρ(a,b)为交叉口a与交叉口b的密度关联度。
22、进一步地,所述对交通路网拓扑图进行初步划分的过程按照以下规则:
23、若相邻交叉口间距l<200米,两交叉口交通状态互相影响,划为同一子区;
24、若相邻交叉口间距l>800米,两交叉口的交通状态独立,划分不同子区;
25、若相邻交叉口间距200米<l<800米,依据改进newman算法按照模块度增量最大的方向对节点进行合并,直至整个网络凝聚为一个社团,根据树状图得到最优划分。
26、进一步地,所述依据各个交叉口的新关联度值,对若干个子区进行合并,计算最大模块度值的过程采用改进newman算法实现。
27、更进一步地,所述改进newman算法包括:
28、基于交通路网拓扑图,对每个节点编号;
29、计算两相邻路口a和b的关联度作为路网中边的权值;
30、路网中n个节点初始化,建立邻接矩阵;
31、根据邻接矩阵,依次合并各个子网络并计算合并后的模块度增量;
32、选择模块度增量最大的节点进行合并,并更新相关参数;
33、重新计算依次合并各个子网络并计算合并后的模块度增量,直至整个网络凝聚为一个社团时算法结束;
34、绘制社团划分树状图,模块度最大值位置处得到最优子区划分结果。
35、进一步地,根据前后两次最大模块度差值与再划分阈值的关系,对区域进行动态划分和重新调整的过程按照以下规则:
36、若d≤d′,不需要进行子区重新划分;
37、若d>d′,需要进行子区重新划分;
38、其中,d为前后两次最大模块度差值,d′为再划分阈值。
39、本发明的第二个方面提供一种考虑时变交通流量的路网交通子区动态划分系统。
40、考虑时变交通流量的路网交通子区动态划分方法,包括:
41、拓扑构建模块,其被配置为:构建交通路网拓扑图;
42、第一预测模块,其被配置为:预测各个交叉口未来一段时间内的交通流量,以计算各个交叉路口的关联度值;
43、初划分模块,其被配置为:依据各个交叉路口的关联度值,对交通路网拓扑图进行初步划分,得到若干个子区;
44、第二预测模块,其被配置为:在下一个时间预测段,依据更新预测的交通流量,计算各个交叉口的新关联度值;
45、划分调整模块,其被配置为:依据各个交叉口的新关联度值,对若干个子区进行合并,计算最大模块度值;根据前后两次最大模块度差值与再划分阈值的关系,对区域进行动态划分和重新调整;
46、动态划分模块,其被配置为:以模块度最大值位置处为最优的子区划分个数,对交通路网拓扑图的子区域进行动态划分。
47、与现有技术相比,本发明的有益效果是:
48、本发明综合分析交通预测流量、路网结构、信号周期对相邻交叉口关联度的影响,建立基于流量关联系数、密度关联系数、信号周期关联系数的交叉口关联度模型。对传统newman社团划分算法进行改进以适应无向有权路网的子区划分,并结合交叉口之间的距离原则,提出了城市路网交通子区动态划分方法,实现了对路网区域的划分研究,以便更好地对城市交通路网进行信号优化控制以提高道路通行能力,缓解道路交通拥堵。
- 还没有人留言评论。精彩留言会获得点赞!