一种结合数字化交通规则的交叉口右转轨迹规划方法
本发明涉及自动驾驶领域,尤其是涉及一种结合数字化交通规则的交叉口右转轨迹规划方法。
背景技术:
1、交通规则是确定事故责任的重要证据,也是确保自动驾驶车辆安全的有力手段。在自动驾驶发展过程中,由于缺乏成熟的技术体系,人类驾驶车辆和自动驾驶车辆共存的情况(人机混驾)将会长期存在。自动驾驶车辆必须学习人类驾驶员所遵守的交通规则,才能更好的应对这种复杂的交通环境。
2、现有的交通规则是为人类驾驶员设计的,自动驾驶车辆难以适应。当前的交通规则通常包含模糊短语,例如:“在没有交通信号的道路上,应当在确保安全、畅通的原则下通行。”,“绿灯亮时,准许车辆通行,但转弯的车辆不得妨碍被放行的直行车辆、行人通行”,“相对方向行驶的右转弯的机动车让左转弯的车辆先行”等。自动驾驶车辆和人类驾驶员的认知存在差异,人类驾驶员可以通过训练和驾驶经验来理解“确保安全”、“不妨碍”、“让行”等模糊词组,但自动驾驶车辆则需要更清晰和全面的解释。
3、交通规则的模糊性导致自动驾驶车辆轨迹规划方法中缺乏对交通规则的考虑。传统的轨迹规划方法以舒适性、效率最大,避免碰撞为目标,即使考虑交通规则的影响,规则的关键参数也是通过人为定义或统计分析得到的,而这不能满足自动驾驶车辆在人机混驾环境下安全、合规运行的需求。
技术实现思路
1、本发明的目的是为了提供一种兼顾效率、舒适和安全的结合数字化交通规则的交叉口右转轨迹规划方法。
2、本发明的目的可以通过以下技术方案来实现:
3、一种结合数字化交通规则的交叉口右转轨迹规划方法,包括以下步骤:
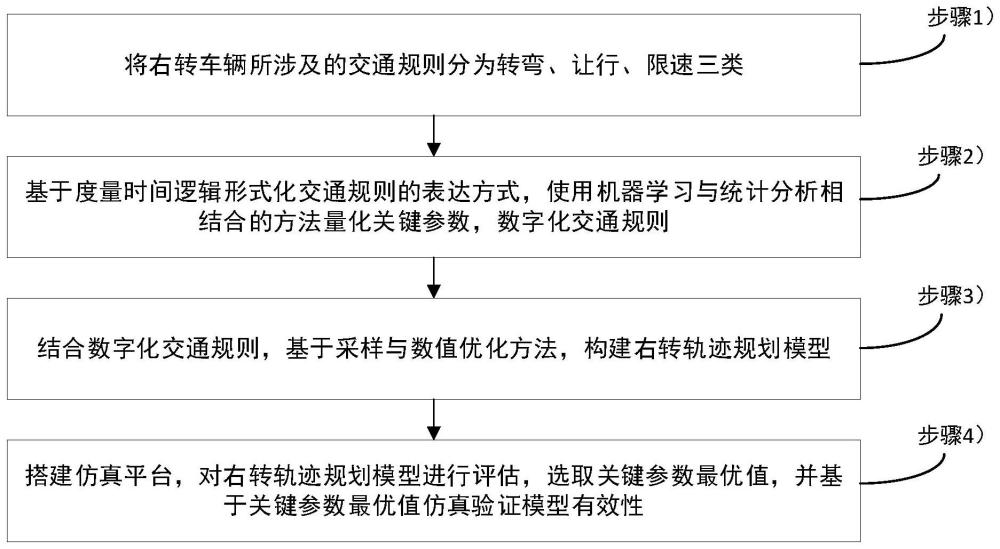
4、步骤1)将右转车辆所涉及的交通规则分为转弯、让行、限速三类;
5、步骤2)基于度量时间逻辑(metric time logic,mtl)形式化交通规则的表达方式,使用机器学习与统计分析相结合的方法量化关键参数,数字化交通规则;
6、步骤3)结合数字化交通规则,基于采样与数值优化方法,构建右转轨迹规划模型;
7、步骤4)搭建仿真平台,对右转轨迹规划模型进行评估,选取关键参数最优值,并基于关键参数最优值仿真验证模型有效性。
8、所述步骤2)包括以下步骤:
9、步骤21)基于度量时间逻辑将每一种交通规则的自然语言转换为命题表达形式,确定关键参数,并将各表达形式分解为可以和关键参数结合的最小原子命题;
10、步骤22)采用机器学习与统计分析相结合的方法量化关键参数。
11、所述各交通规则的命题表达形式如下:
12、i)转弯:
13、ii)让行:
14、iii)限速:
15、其中,trightturn表示是否进行正常右转操作;trightway表示是否进行让行;tspeedlimitation表示是否遵守限速;t表示是;f表示否;locationrangeturn表示是否在转弯范围内;safeviolation表示是否违反安全约束;locationrange表示是否在减速范围内;speedviolation表示是否违反限速约束。
16、所述将各表达形式分解为可以和关键参数结合的最小原子命题具体为:
17、转弯范围locationrangeturn使用转弯起始位置xturnstop*,转弯结束位置xturnend*表示;转弯安全阈值safeviolation使用时间安全阈值ttc*,相对距离xrelative*表示;减速范围locationrange使用减速起始位置xstop*,转弯结束位置xturnend*,转弯时的限速约束speedviolation使用vlimit*表示,得到最小原子命题表示为:
18、
19、
20、
21、
22、
23、其中,表示从转弯开始t1至转弯结束t2,每时每刻都在发生;distance(ego,stopline)表示自车至进口道停止线的距离;distance(ego,stoplineexit)表示自车至出口道停止线的距离;tgt表示他车;ttc(ego,tgt)表示自车与他车之间的ttc值;distance(ego,tgt)表示自车与他车的相对距离;distancey(ego,tgt)表示自车与他车之间的纵向相对距离;distancex(ego,tgt)表示自车与他车之间的横向相对距离;表示从减速开始t3至转弯结束t2,每时每刻都在发生;表示从转弯开始t1至转弯结束t2发生过;vx(ego)表示某一时刻自车的速度。
24、所述关键参数从时间和空间两个角度确定,其中,时间指标使用扩展碰撞时间ettc(extended time to collision,ettc)表示,空间指标使用相对距离表示。
25、所述步骤22)具体为:
26、步骤221)对于时间指标ettc,使用机器学习方法量化:基于ettc的冲突严重程度用于表示安全等级,分为严重、轻微和潜在冲突三类,经过人工筛选和局部离群因子剔除异常值后,使用k-means++将最大jerk、相对速度和相对距离聚类为三类,选择每类的ettc范围来构成该类别的安全边界,即为ttc*;
27、步骤222)对于空间指标使用统计分析方法量化:考虑到交通运行的特点,选取典型值,如:第15、85百分位、最大占比等作为xrelative*;统计严重冲突发生时右转车辆距进口道停止线的距离,选择占比最高的位置作为xturnstop*;统计所有冲突发生时速度随车辆位置的变化情况,得到显著减速点作为xstop*;vlimit*选择30km/h;转弯车辆驶离出口道停止线后认为转弯结束,以此确定xturnend*。
28、所述步骤3)包括以下步骤:
29、步骤31)针对每一种交通规则类型确定不同的轨迹采样方式,其中限速规则融入让行和转弯规则中;
30、步骤32)根据采样的终端位置,使用五次多项式拟合优化从采样起点至终点的轨迹,构建右转轨迹规划模型;
31、步骤33)最优轨迹选取:基于安全、效率、舒适三类指标综合选取最优轨迹。
32、所述步骤31)中,所有采样在frenet坐标系下完成,在frenet坐标系下,采样的终端状态用[s ds dds l dl ddl]表示,其中,s为纵向位移,ds为纵向速度,dds为纵向加速度,l为横向位移,dl为横向速度,ddl为横向加速度。
33、所述步骤31)中,规定三种终端状态xego(k)的采样方式,其中,
34、转弯的采样方式为:xego(k)=[nan dsturn 0 l 0 0],采样时间t的计算方式为在2s至4s之间均匀采样6个点;
35、让行的采样方式为:xego(k)=[sstop 0 0 0 0 0],采样时间t为采用minimum-jerk方法得到平滑度最优的轨迹所用的时间;
36、转弯范围外行驶的采样方式为:xego(k)=[nan dsnormal 0 l 0 0],采样时间t的计算方式为在2s至4s之间均匀采样6个点;
37、其中,nan表示对s的终端状态没有要求;dsturn表示转弯时终端速度的采样,在0至vlimit*之间均匀采样10个点;l表示横向位置的采样,在0和lanewidth之间选择,lanewidth表示一个车道的宽度;sstop为采样终端的纵向位置,让行采样时车辆需要在停止线前停止;dsnormal表示在转弯范围外行驶时终端速度的采样,在0至vlimitnormal之间均匀采样10个点,vlimitnormal表示转弯范围之外的限速值。
38、所述步骤33)具体为:
39、安全类指标采用碰撞概率pc作为评估指标,舒适类指标采用横向、纵向的累计jerk值作为评估指标,效率类指标采用采样轨迹的平均值与限速值之间的速度差作为评估指标,将三类评估指标归一化后相加,选择值最小的轨迹作为最优采样轨迹,其中,pc使用高斯函数表示:
40、
41、其中δr=r-rmin,rmin=min[l/2,w/2],r为他车与自车之间的距离,l为自车车辆长度,w为车辆宽度,σ为高斯函数的方差,rmax为存在碰撞的最大距离。
42、与现有技术相比,本发明具有以下有益效果:
43、(1)本发明通过数字化交通规则,并与轨迹规划方法结合,提高了自动驾驶车辆右转的安全性;
44、(2)本发明提出形式化加量化的交通规则数字化方法,弥补了现有交通规则模糊不清的不足,更加适应自动驾驶场景;
45、(3)本发明将数字化的交通规则嵌入轨迹规划的采样方法中,弥补了现有轨迹规划模型缺乏考虑交通规则的不足,使自动驾驶车辆更加适应人机混驾环境。
- 还没有人留言评论。精彩留言会获得点赞!