一种基于汽车运动状态时序数据的交通冲突判别方法
本发明涉及一种基于汽车运动状态时序数据的交通冲突判别方法,属于基于交通冲突的交通安全分析领域。
背景技术:
1、随着道路交通行业的快速发展和交通建设投资力度的不断增大,道路交通安全问题引发了社会各界的广泛关注。近年来,随着相关理论研究和工程实践的大量开展,道路交通事故黑点识别技术已成为世界各国预防道路交通事故、提升交通安全管理水平的有效手段。
2、机器学习、数据挖掘等技术和理论的迅速发展以及机器视觉技术、多源车载传感设备的逐步普及为道路交通数据采集创造了新的条件。尽管多源数据采集技术为道路事故黑点识别提供了丰富的信息,但传统黑点识别主要基于事故频次预测模型开展,其缺点在于需采集大量历史交通事故数据,不适用于新建道路或事故数据采集困难的已建道路;且依据历史事故、风险因素数据构建的预测模型很难具备良好的时效性。交通冲突的发生过程、机理与交通事故密切相关,且具有实时、频发的特点。因此,运用多源数据采集技术获取交通冲突数据,通过构建交通冲突与交通事故的关系,从而开展道路安全分析与评价,可有效解决传统黑点识别理论依赖历史事故数据、时效性弱的问题。
3、然而,已有的基于交通冲突理论的道路交叉口机动车的交通冲突判别方法存在以下问题:一、现有的研究大多采用单个交通冲突指标或综合运用两个冲突指标进行交通冲突/非冲突的划分,但受限于现有理论框架内模型计算的复杂度,交通冲突指标难以拓展至多元;二、求解交通冲突/非冲突阈值时,未充分利用多元指标构成的高维数据一致性、互补性信息,交通冲突事件的判别精度有待提升;三、传统方法往往基于经验或根据冲突识别结果与事故数据的相关性确定交通冲突指标的阈值,且采用固定值,实际上,指标的阈值受交通设施特征、交通状态、天气环境等因素的影响,因此,现有交通冲突判别方法的可移植性、可拓展性较差。
技术实现思路
1、本发明是为避免上述现有技术所存在的问题,提供一种基于汽车运动状态时序数据的交通冲突判别方法,以期能实现高效、客观地判别道路交叉口机动车间的交通冲突,并提高判别交通冲突的精度和科学性,从而能提升道路交叉口内机动车的交通安全水平。
2、本发明为解决技术问题采用如下技术方案:
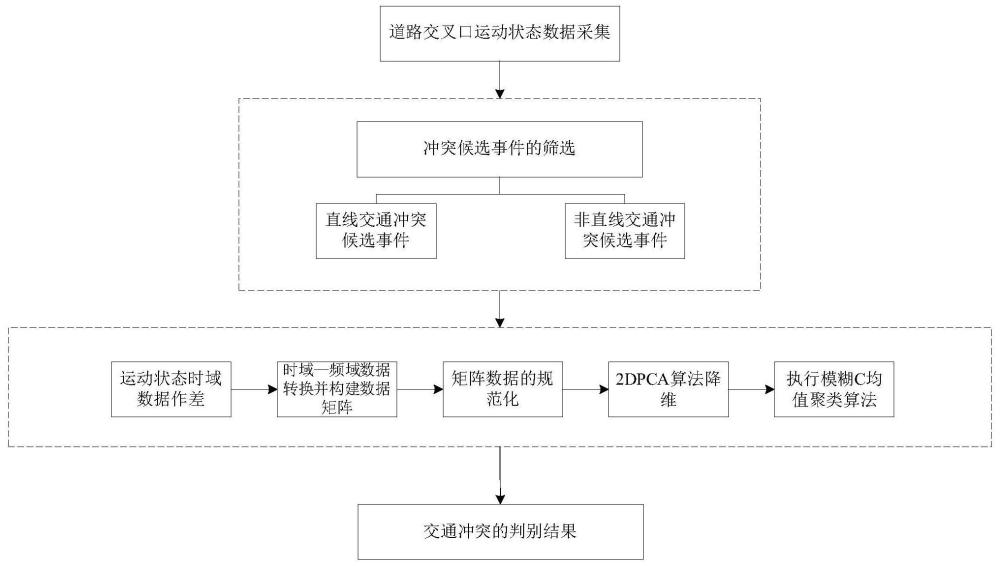
3、本发明一种基于汽车运动状态时序数据的交通冲突判别方法的特点在于,是按如下步骤进行:
4、步骤一、道路交叉口的选择以及车辆的运动学状态数据的采集和预处理;
5、步骤1.1、从道路交通出行信息系统中采集z个交叉口处帧率为θ的早高峰视频数据,并从第i个道路交叉口中提取任意机动车a以及任意机动车b的运动学状态数据,包括:机动车位置、速度和加速度、横纵向速度和横纵向加速度;i=1,2,...,z;
6、步骤1.2、若机动车a和机动车b在第i个道路交叉口的同一条水平直线上相互逼近,则执行步骤1.2.1-步骤1.2.2,若机动车a和机动车b在第i个道路交叉口处以交错方式相互逼近,则执行步骤1.2.3-步骤1.2.4;
7、步骤1.2.1、若机动车a和机动车b在第i个道路交叉口的同一条水平直线上同向行驶,且机动车a为前车,机动车b为后车,则利用式(1)计算t时刻下的机动车a和机动车b在第i个道路交叉口的碰撞时间ttca,b(t),从而得到所有n时刻下第i个道路交叉口的同向碰撞时间并选取最小值,记为min ttca,b:
8、
9、式(1)中,la,b(t)表示t时刻下第i个道路交叉口处的后车b的车头到前车a的车尾之间的距离,vb(t)表示t时刻下第i个道路交叉口处后车b的速度,va(t)表示t时刻下第i个道路交叉口处前车a的速度;
10、若当前机动车a和机动车b在第i个道路交叉口的同一条水平直线上对向行驶,则利用式(1)计算t时刻下第i个道路交叉口的机动车a和机动车b的碰撞时间ttc′a,b(t),从而得到所有n时刻下第i个道路交叉口的同向碰撞时间并选取最小值,记为min ttca,b;
11、
12、式(1)中,l′a,b(t)表示t时刻下第i个道路交叉口处机动车a和机动车b的车头之间的距离,va(t)、vb(t)分别表示t时刻下第i个道路交叉口的机动车a和动车b的速度;
13、步骤1.2.2、利用式(3)计算t时刻下第i个道路交叉口处机动车a和机动车b的交通冲突风险度量指标从而得到所有n时刻下第i个道路交叉口的交通冲突风险度量指标并选取最小值,记为
14、
15、式(3)中,da(t)表示t时刻下第i个道路交叉口处机动车a和机动车b保持当前行驶方向不变时,两车预期轨迹相交点与机动车a的距离,db(t)表示t时刻下第i个道路交叉口处机动车a和机动车b保持当前行驶方向不变时,两车预期轨迹相交点与机动车b的距离;
16、步骤1.3、判断第i个道路交叉口处的k个机动车冲突的候选事件,其中每个机动车冲突的候选事件的判断规则为:
17、若第i个道路交叉口处的机动车a或机动车b的纵向加速度绝对值≥g1且minttca,b≤κ,则表示第i个道路交叉口处的机动车a和机动车b为追尾或对向冲突的候选事件;
18、若第i个道路交叉口处的机动车a或机动车b的横向加速度绝对值≥g2且则表示第i个道路交叉口处的机动车a和机动车b为有角度冲突的候选事件;
19、其中,g1表示追尾或对向冲突候选事件中机动车a或机动车b的纵向加速度绝对值阈值,κ表示追尾或对向冲突候选事件中机动车a和机动车b的min ttca,b阈值,g2表示有角度冲突的候选事件中机动车a或机动车b的纵向加速度绝对值阈值,τ表示有角度冲突的候选事件中机动车a和机动车b的阈值;
20、步骤1.4、利用式(4)计算所有n时刻下第i个道路交叉口处任意一个机动车冲突候选事件中机动车a与机动车b的后侵入时间指标:
21、peta,b=ta-tb (4)
22、式(4)中,ta表示后经过两车预期轨迹相交点的机动车a的车头到达第i个道路交叉口处相交点的时刻,tb表示先经过两车预期轨迹相交点的机动车b的车尾离开第i个道路交叉口处相交点的时刻;
23、步骤1.5、对第i个道路交叉口处机动车冲突的候选事件中两机动车的运动学状态数据进行做差后,得到第i个道路交叉口的第j个冲突候选事件中机动车的横向作差速度vxij、纵向作差速度vyij、横向作差加速度axij、纵向作差加速度ayij;i=1,2,3,...,z,j=1,2,...,k;
24、步骤二、根据运动学状态作差数据,对每个道路交叉口分别建立离散傅里叶变换模型,并利用其变换所得频谱图获得面积数据,构建数据矩阵;
25、步骤2.1、定义步长为n;
26、步骤2.2、将vxij、vyij、axij、ayij中的任意一个作差数据记为时域数据xt,并利用式(5)对xt进行离散傅里叶变换后,得到频带为f时的频域数据xf:
27、
28、式(5)中,f=0,1,2,...,n-1;t=0,1,2,...,n-1;表示虚数单位;
29、步骤2.3、设定截止频率为画出xf的频谱图,并将所得频谱图与坐标轴围成的区域在频率方向等分为ψ个部分,求取每个部分的面积{sμ|μ=2,3,...,ψ}以及总面积s,其中,sμ表示第μ个部分的面积;
30、步骤2.4、利用式(6)构建第i个道路交叉口的第j个冲突候选事件的数据矩阵xij:
31、
32、式(6)中,分别表示vyij经离散傅里叶变换后的频谱图中第μ个部分的面积和总面积,分别表示vxij经离散傅里叶变换后的频谱图中第μ个部分的面积和总面积,分别表示ayij经离散傅里叶变换后的频谱图中第μ个部分的面积和总面积,分别表示axij经离散傅里叶变换后的频谱图中第μ个部分的面积和总面积;
33、步骤三、利用式(7)建立第i个道路交叉口的第j个机动车冲突候选事件的归一化矩阵数据xi,j,norm:
34、
35、式(7)中,表示xi,j的均值,且σi,j表示xi,j的标准差,且
36、步骤四、分别建立第i个道路交叉口的2dpca算法的降维模型;
37、步骤4.1、利用式(8)得到第i个道路交叉口的协方差矩阵gi:
38、
39、式(8)中,表示第i个道路交叉口的平均矩阵,且t表示转置;
40、步骤4.2、求出协方差矩阵gi的4个特征值并进行降序排序后,得到排序后的特征值{λi,l|l=1,2,3,4}及其相应的正交特征向量{πi,l|l=1,2,3,4};其中,λi,l表示gi的第l个特征值,πi,l表示gi的第l个特征值对应的特征向量;
41、步骤4.3、定义所选择的特征值的数量为d,并初始化d=1;
42、步骤4.4、计算累计贡献率其中,λi,l′表示第l′个特征值;
43、步骤4.5、若q≥q0;则将d个特征值{λi,l′|l′=1,2,..d.},所对应的正交特征向量{πi,l′|l′=1,2,...,d}组成最优投影矩阵vopt,否则,将d+1赋值给d后,返回步骤4.4顺序执行,直到d>4为止,其中,q0表示累计贡献率阈值,πi,l′表示第l′个特征值λi,l′对应的正交特征向量;
44、步骤4.5、利用式(9)对矩阵数据进行投影降维,得到第i个道路交叉口的第j个机动车冲突候选事件的降维矩阵yi,j:
45、
46、步骤五、分别建立每个道路交叉口的模糊c均值聚类模型识别交通冲突;
47、步骤5.1、将yi,j按列展开成向量数据,记为y′i,j={yi,j,1,yi,j,2,...,yi,j,r,...yi,j,ψ×d},其中,yi,j,r表示第i个交叉口第j个向量数据的第r个值,1≤r≤ψ×d;
48、步骤5.2、初始化聚类个数为q,设置最大迭代次数为bmax以及终止阈值为ε,定义第s个簇质心为cs,y′ij对簇质心cs的隶属度记为ui,j,s,定义当前迭代次数为b;1≤s≤q,1≤j≤k;
49、初始化b=1;随机初始化第b次迭代下的簇质心为
50、步骤5.3、利用式(10)计算第b次迭代下的隶属度矩阵
51、
52、式(10)中,为y′ij到簇质心的拉格朗日距离;为y′ij到第s′个聚簇质心的拉格朗日距离;m为模糊加权参数;
53、步骤5.4、利用式(11)计算第b+1次迭代下的第s个聚类中心
54、
55、步骤5.5、利用式(12)构建第b次迭代下的目标函数
56、
57、步骤5.6、将b+1赋值给b后,利用式(12)计算第b+1次迭代下的目标函数
58、步骤5.7、若b>bmax或与则表示得到第i个道路交叉口在第b+1次迭代下的q个最佳聚类簇,否则,返回步骤5.3顺序执行;
59、步骤5.8、利用式(1)、式(2)、式(3)、式(4)计算第i个道路交叉口数据的第s个最佳聚类簇对应的每个冲突候选事件的同向碰撞时间最小值、交通冲突风险度量指标最小值、后侵入时间指标;从而得到第i个道路交叉口q个最佳聚类簇对应的所有冲突候选事件的同向碰撞时间最小值、交通冲突风险度量指标最小值、后侵入时间指标;
60、步骤5.9、将q个最佳聚类簇对应的所有冲突候选事件的同向碰撞时间最小值、交通冲突风险度量指标最小值、后侵入时间指标中超过3/4以上小于阈值δ的所有最佳聚类簇划分为交通冲突类,其余最佳聚类簇划分为非交通冲突类。
61、本发明一种电子设备,包括存储器以及处理器的特点在于,所述存储器用于存储支持处理器执行所述交通冲突判别方法的程序,所述处理器被配置为用于执行所述存储器中存储的程序。
62、本发明一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序的特点在于,所述计算机程序被处理器运行时执行所述交通冲突判别方法的步骤。
63、与已有技术相比,本发明的有益效果体现在:
64、1、与传统的采用单个交通冲突指标或综合运用两个冲突指标进行交通冲突/非冲突的判别方法相比,本发明充分考虑了机动车横、纵向速度和横、纵向加速度多个时域数据指标,全面考虑多个指标的关联信息,从而提升了机动车间交通冲突判别的精度和准确性。
65、2、本发明考虑到了多元指标构成的高维数据一致性、互补性信息,采用2dpca算法将矩阵数据进行投影和数据重构,极大程度上减少了高维矩阵数据的维度和空间冗余、保留了矩阵数据的局部空间关系信息和结构特征,从而提高了交通冲突判别的效率和精度。
66、3、本发明考虑到了不同道路交叉口的交通冲突指标阈值划分存在主观性较强、可移植性较差的问题,提出了分别对不同道路交叉口的数据执行模糊c均值聚类算法,增强了交通冲突判别的理论依据和判别方法的可移植性。
- 还没有人留言评论。精彩留言会获得点赞!