机械式编码器及其机械式活动组件的制作方法
1.本申请涉及一种机械式编码器及其机械式活动组件,特别是涉及一种用于降低摩擦阻力的机械式编码器及其机械式活动组件。
背景技术:
2.现有的机械式编码器主要包括有相互接触的导电弹片以及转动栅环。当转动栅环被带动而旋转时,导电弹片会接触转动栅环的导电区域或者绝缘区域,借此以产生编码信号。然而,导电弹片与转动栅环彼此之间的接触将会产生较高的摩擦阻力,而导致导电弹片与转动栅环的损耗,并降低使用寿命。
技术实现要素:
3.本申请所要解决的技术问题在于,针对现有技术的不足提供一种机械式编码器及其机械式活动组件。
4.根据本申请的一方面,提供一种机械式活动组件,包括:第一配合件、第二配合件以及可转动结构。所述第一配合件具有电连接于第一电极的多个导电区域以及与所述第一电极彼此绝缘的多个绝缘区域。所述第二配合件电连接于第二电极,其中,所述第一配合件与所述第二配合件彼此分离,且所述第一配合件能移动地设置在所述第二配合件的下方。所述可转动结构能转动地设置在所述第二配合件上且能转动地接触所述第一配合件的所述导电区域与所述绝缘区域两者其中之一。其中,所述可转动结构具有能滑动地接触所述第一配合件的弧形表面。
5.更进一步地,所述第二配合件具有相互对应的两个延伸臂以及形成在两个所述延伸臂之间的容置空间,其中,所述可转动结构包括连接于两个所述延伸臂之间且容置在所述容置空间内的枢接轴以及能枢接地设置在所述枢接轴上且部分地裸露在所述容置空间外的枢接滚轮,且所述枢接滚轮具有能滑动地接触所述第一配合件的圆弧面,以降低所述枢接滚轮与所述第一配合件之间的摩擦阻力。
6.更进一步地,所述第二配合件具有相互对应的两个延伸臂以及形成在两个所述延伸臂之间的容置空间,其中,所述可转动结构包括连接于两个所述延伸臂之间且容置在所述容置空间内的枢接轴以及能枢接地设置在所述枢接轴上且部分地裸露在所述容置空间外的枢接滚球,且所述枢接滚球具有能滑动地接触所述第一配合件的球面,以降低所述枢接滚球与所述第一配合件之间的摩擦阻力。
7.更进一步地,所述第二配合件具有延伸臂,其中,所述可转动结构包括贯穿所述延伸臂的枢接轴以及两个分别能枢接地设置在所述枢接轴的两相反侧端部上且被所述延伸臂所隔开的枢接滚轮,且每一个所述枢接滚轮具有能滑动地接触所述第一配合件的圆弧面,以降低所述枢接滚轮与所述第一配合件之间的摩擦阻力。
8.更进一步地,所述第二配合件具有延伸臂,其中,所述可转动结构包括贯穿所述延伸臂的枢接轴以及两个分别能枢接地设置在所述枢接轴的两相反侧端部上且被所述延伸
臂所隔开的枢接滚球,且每一个所述枢接滚球具有能滑动地接触所述第一配合件的球面,以降低所述枢接滚球与所述第一配合件之间的摩擦阻力。
9.更进一步地,所述第二配合件的底面具有凹槽,其中,所述可转动结构包括容置在所述凹槽内的枢接轴以及能枢接地设置在所述枢接轴上且部分地裸露在所述凹槽外的枢接滚轮,且所述枢接滚轮具有能滑动地接触所述第一配合件的圆弧面,以降低所述枢接滚轮与所述第一配合件之间的摩擦阻力。
10.更进一步地,所述第二配合件的底面具有凹槽,其中,所述可转动结构包括容置在所述凹槽内的枢接轴以及能枢接地设置在所述枢接轴上且部分地裸露在所述凹槽外的枢接滚球,且所述枢接滚球具有能滑动地接触所述第一配合件的球面,以降低所述枢接滚轮与所述第一配合件之间的摩擦阻力。
11.更进一步地,所述第二配合件的底面具有凹槽,其中,所述可转动结构包括一部分地设置在所述凹槽内的滚动球体,且所述滚动球体具有能滑动地接触所述第一配合件的球面,以降低所述滚动球体与所述第一配合件之间的摩擦阻力。
12.更进一步地,所述第二配合件为用于提供预定弹力的弹性导电件,且所述可转动结构通过所述第二配合件所提供的弹力而向下顶抵所述第一配合件。
13.根据本申请的另一方面,提供一种机械式编码器,所述机械式编码器使用机械式活动组件,其特征在于,所述机械式活动组件包括:第一配合件、第二配合件以及可转动结构。所述第一配合件具有电连接于第一电极的多个导电区域以及与所述第一电极彼此绝缘的多个绝缘区域。所述第二配合件电连接于第二电极,其中,所述第一配合件与所述第二配合件彼此分离,且所述第一配合件能移动地设置在所述第二配合件的下方。所述可转动结构能转动地设置在所述第二配合件上且能转动地接触所述第一配合件的所述导电区域与所述绝缘区域两者其中之一。其中,所述可转动结构具有能滑动地接触所述第一配合件的弧形表面。其中,当所述可转动结构接触所述第一配合件的所述导电区域时,所述机械式编码器输出表示为1的通路信号。其中,当所述可转动结构接触所述第一配合件的所述绝缘区域时,所述机械式编码器输出表示为0的断路信号。
14.更进一步地,所述机械式编码器还进一步包括:控制组件,所述控制组件与所述机械式活动组件相互配合,且所述第一导电件通过所述控制组件的带动而相对于所述第二导电件进行直线移动或者弧线移动。
15.本申请的其中一有益效果在于,本申请所提供的一种机械式编码器及其机械式活动组件,能通过“所述可转动结构能转动地设置在所述第二配合件上且能转动地接触所述第一配合件的所述导电区域与所述绝缘区域两者其中之一”以及“所述可转动结构具有能滑动地接触所述第一配合件的弧形表面”的技术方案,以降低所述可转动结构与所述第一配合件之间的摩擦阻力。
16.为使能更进一步了解本申请的特征及技术内容,请参阅以下有关本申请的详细说明与附图,然而所提供的附图仅用于提供参考与说明,并非用来对本申请加以限制。
附图说明
17.图1为本申请第一实施例的机械式活动组件可转动结构能转动地接触第一配合件的俯视示意图。
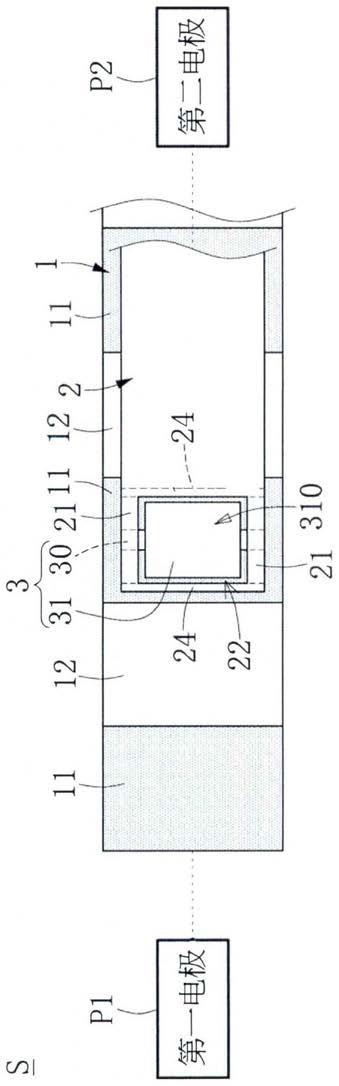
18.图2为本申请第一实施例的机械式活动组件可转动结构能转动地接触第一配合件的侧视示意图。
19.图3为本申请第一实施例的机械式活动组件可转动结构能转动地接触第一配合件的俯视示意图。
20.图4为本申请第一实施例的机械式活动组件可转动结构能转动地接触第一配合件的侧视示意图。
21.图5为本申请第二实施例的机械式活动组件的俯视示意图。
22.图6为本申请第三实施例的机械式活动组件的俯视示意图。
23.图7为本申请第三实施例的机械式活动组件的侧视示意图。
24.图8为本申请第四实施例的机械式活动组件的俯视示意图。
25.图9为本申请第五实施例的机械式活动组件的俯视示意图。
26.图10为本申请第五实施例的机械式活动组件的侧视示意图。
27.图11为本申请第六实施例的机械式活动组件的俯视示意图。
28.图12为本申请第七实施例的机械式活动组件的俯视示意图。
29.图13为本申请第七实施例的机械式活动组件的侧视示意图。
30.图14为本申请第八实施例的机械式编码器的示意图。
31.图15为本申请第九实施例的机械式编码器的示意图。
32.图16为本申请第九实施例的机械式编码器的两个可转动结构都接触绝缘区域时的示意图。
33.图17为本申请第九实施例的机械式编码器的两个可转动结构分别接触导电区域与绝缘区域时的示意图。
具体实施方式
34.以下是通过特定的具体实施例来说明本申请所公开有关“机械式编码器及其机械式活动组件”的实施方式,本领域技术人员可由本说明书所公开的内容了解本申请的优点与效果。本申请可通过其他不同的具体实施例加以施行或应用,本说明书中的各项细节也可基于不同观点与应用,在不脱离本申请的构思下进行各种修改与变更。另外,本申请的附图仅为简单示意说明,并非依实际尺寸的描绘,事先声明。以下的实施方式将进一步详细说明本申请的相关技术内容,但所公开的内容并非用以限制本申请的保护范围。
35.应当可以理解的是,虽然本文中可能会使用到“第一”、“第二”、“第三”等术语来描述各种元件或者信号,但这些元件或者信号不应受这些术语的限制。这些术语主要是用以区分一元件与另一元件,或者一信号与另一信号。另外,本文中所使用的术语“或”,应视实际情况可能包括相关联的列出项目中的任一个或者多个的组合。
36.第一实施例
37.请参阅图1至图4所示,本申请第一实施例提供一种机械式活动组件s,包括:第一配合件1、第二配合件2以及可转动结构3。另外,第一配合件1具有电连接于第一电极p1的多个导电区域11以及与第一电极p1彼此绝缘的多个绝缘区域12,第二配合件2电连接于第二电极p2,并且可转动结构3能转动地设置在第二配合件2上且能转动地接触第一配合件1的导电区域11与绝缘区域12两者其中之一。举例来说,多个导电区域11与多个绝缘区域12可
以交替排列,并且机械式活动组件s可以应用于机械式编码器(图未示)。配合图1与图3所示,当可转动结构3接触第一配合件1的导电区域11时,机械式编码器会输出表示为1的通路信号(也就是高电压信号)。配合图2与图4所示,当可转动结构接触第一配合件1的绝缘区域12时,机械式编码器会输出表示为0的断路信号(也就是低电压信号)。也就是说,当第一配合件1相对于第二配合件2进行移动而使得可转动结构3交替地接触第一配合件1的导电区域11与绝缘区域12时,机械式编码器就会依序输出1、0、1、0、1、0
…
的信号。
38.更进一步来说,第一配合件1与第二配合件2都可由任何的导电材料所制成。举例来说,第一配合件1可为具有多个导电区域11与多个绝缘区域12的条状基板或者盘状基板,并且第二配合件2可为导电弹片或者其它任何的导电体,然而本申请不以此举例为限。另外,第一电极p1与第二电极p2可以分别是正极与负极,或者是第一电极p1与第二电极p2可以分别是负极与正极。
39.更进一步来说,第一配合件1与第二配合件2彼此分离,并且第一配合件1能移动地设置在第二配合件2的下方。举例来说,第一配合件1能在第二配合件2的下方进行直线移动,或者是第一配合件1能在第二配合件2的下方进行弧线移动。
40.更进一步来说,第二配合件2可为用于提供预定弹力的弹性导电件,所以可转动结构3能够通过第二配合件2所提供的弹力而向下顶抵第一配合件1。
41.更进一步来说,可转动结构3具有能滑动地接触第一配合件1的导电区域11与绝缘区域12两者其中之一的弧形表面,借此以降低可转动结构3与第一配合件1之间的摩擦阻力(或者是摩擦系数)。也就是说,当第一配合件1被带动而使得可转动结构3能滑动地接触第一配合件1时,由于可转动结构3是以其弧形表面滑动地接触第一配合件1,所以可转动结构3与第一配合件1之间的摩擦阻力(或者是摩擦系数)就会降低,并且可转动结构3与第一配合件1两者的磨损率也会跟着降低。因此,机械式活动组件s的使用寿命与产品可靠度就能够通过可转动结构3的使用而得到提升。
42.举例来说,第二配合件2具有相互对应的两个延伸臂21以及形成在两个延伸臂21之间的容置空间22。此外,可转动结构3包括枢接轴30以及枢接滚轮31。枢接轴30连接于两个延伸臂21之间且容置在容置空间22内,并且枢接滚轮31能枢接地设置在枢接轴30上且部分地裸露在容置空间22外。另外,枢接滚轮31具有能滑动地接触第一配合件1的导电区域11与绝缘区域12两者其中之一的圆弧面310。
43.借此,由于枢接滚轮31具有能滑动地接触第一配合件1的圆弧面310,所以枢接滚轮31与第一配合件1之间的摩擦阻力(或者是摩擦系数)就会降低,并且枢接滚轮31与第一配合件1两者的磨损率也会跟着降低。因此,机械式活动组件s的使用寿命与产品可靠度就能够通过枢接滚轮31的使用而得到提升。
44.此外,本申请的第二配合件2还可包括朝向第一配合件1延伸的至少一个阻挡部24,至少一个阻挡部24与第一导电件1之间形成间隙h,以阻挡异物的通过。举例来说,配合图1至图4所示,第二配合件2还具有至少一个阻挡部24,在本实施例中以相互对应的两个阻挡部24作为示例,但不以此为限。本申请的第二配合件2对应于第一配合件1的一面具有两个阻挡部24。并且,阻挡部24的设置方向与可转动结构3的位移方向相互垂直,但不以此为限。因此,本申请的机械式活动组件s通过阻挡部24的设置,可在可转动结构3的枢接滚轮31位移的过程中,阻挡外界异物进入容置空间22中,以避免外界异物沾粘、粘附在枢接滚轮31
上,而影响、降低可转动结构3感测第一配合件1的准确率。其中,异物可为砂尘、飞灰、尘埃或其他物质,砂尘的大小介于90微米至2000微米,飞灰的大小介于3微米至80微米,尘埃的大小介于0.9微米至120微米;因此,本申请的间隙h的大小可根据所要阻挡的异物的物体大小而更改。换句话说,间隙h的大小可介于0.9至2000且包含1至2000中任一个正整数(单位为微米)。
45.然而,上述所举的例子只是其中一个可行的实施例而并非用以限定本申请。
46.第二实施例
47.请参阅图5所示,本申请第二实施例提供一种机械式活动组件s,其包括:第一配合件1、第二配合件2以及可转动结构3。由图5与图1的比较可知,本申请第二实施例与第一实施例的最大差别在于:第一实施例所使用的是“具有圆弧面310的枢接滚轮31(如图1所示)”,而第二实施例所使用的是“具有球面320的枢接滚球32(如图5所示)”。因此,依据不同的需求,可转动结构3可以是“使用具有圆弧面310的枢接滚轮31(如图1所示)”,或者是“使用具有球面320的枢接滚球32(如图5所示)”。
48.更进一步来说,如图5所示,可转动结构3包括一枢接轴30以及一枢接滚球32。枢接轴30连接于两个延伸臂21之间且容置在容置空间22内,并且枢接滚球32能枢接地设置在枢接轴30上且部分地裸露在容置空间22外。另外,枢接滚球32具有能滑动地接触第一配合件1的导电区域11与绝缘区域12两者其中之一的球面320。
49.借此,由于枢接滚球32具有能滑动地接触第一配合件1的球面320,所以枢接滚球32与第一配合件1之间的摩擦阻力就会降低,并且枢接滚球32与第一配合件1的磨损率也会跟着降低。因此,机械式活动组件s的使用寿命与产品可靠度就能够通过枢接滚球32的使用而得到提升。
50.此外,第二配合件2还具有至少一个阻挡部24。举例来说,配合图5所示,在本实施例中,第二配合件2以相互对应的两个阻挡部24作为示例,但不以此为限。因此,通过阻挡部24的设置,可在枢接滚球32位移的过程中,阻挡外界异物进入容置空间22中,以避免外界异物沾粘、粘附在枢接滚球32的球面320上,而影响、降低可转动结构3感测第一配合件1的准确率。
51.然而,上述所举的例子只是其中一个可行的实施例而并非用以限定本申请。
52.第三实施例
53.请参阅图6与图7所示,本申请第三实施例提供一种机械式活动组件s,包括:第一配合件1、第二配合件2以及可转动结构3。由图6与图1的比较,以及图7与图3的比较可知,本申请第三实施例与第一实施例最大的差别在于:第三实施例的第二配合件2具有单一延伸臂21。
54.更进一步来说,可转动结构3包括枢接轴30以及两个枢接滚轮31。枢接轴30会贯穿延伸臂21,并且两个枢接滚轮31分别能枢接地设置在枢接轴30的两相反侧端部上且被延伸臂21所隔开。另外,枢接滚轮31具有能滑动地接触第一配合件1的导电区域11与绝缘区域12两者其中之一的圆弧面310。
55.借此,由于枢接滚轮31具有能滑动地接触第一配合件1的圆弧面310,所以枢接滚轮31与第一配合件1之间的摩擦阻力就会降低,并且枢接滚轮31与第一配合件1两者的磨损率也会跟着降低。因此,机械式活动组件s的使用寿命与产品可靠度就能够通过枢接滚轮31
的使用而得到提升。
56.此外,第二配合件2还具有至少一个阻挡部24。举例来说,配合图6与图7所示,在本实施例中,第二配合件2以相互对应的两个阻挡部24作为示例,但不以此为限。因此,通过阻挡部24的设置,可在枢接滚轮31位移的过程中,阻挡外界异物进入容置空间22中,以避免外界异物沾粘、粘附在枢接滚轮31的圆弧面310上,而影响、降低可转动结构3感测第一配合件1的准确率。
57.然而,上述所举的例子只是其中一个可行的实施例而并非用以限定本申请。
58.第四实施例
59.请参阅图8所示,本申请第四实施例提供一种机械式活动组件s,包括:第一配合件1、第二配合件2以及可转动结构3。由图8与图6的比较可知,本申请第四实施例与第三实施例的最大差别在于:第三实施例所使用的是“具有圆弧面310的枢接滚轮31(如图6所示)”,而第四实施例所使用的是“具有球面320的枢接滚球32(如图8所示)”。因此,依据不同的需求,可转动结构3可以是“使用具有圆弧面310的枢接滚轮31(如图6所示)”,或者是“使用具有球面320的枢接滚球32(如图8所示)”。
60.更进一步来说,如图8所示,可转动结构3包括枢接轴30以及两个枢接滚球32。枢接轴30能贯穿延伸臂21,并且两个枢接滚球32分别能枢接地设置在枢接轴30的两相反侧端部上且被延伸臂21所隔开。另外,枢接滚球32具有能滑动地接触第一配合件1的导电区域11与绝缘区域12两者其中之一的球面320。
61.借此,由于枢接滚球32具有能滑动地接触第一配合件1的球面320,所以枢接滚球32与第一配合件1之间的摩擦阻力就会降低,并且枢接滚球32与第一配合件1的磨损率也会跟着降低。因此,机械式活动组件s的使用寿命与产品可靠度就能够通过枢接滚球32的使用而得到提升。
62.此外,第二配合件2还具有至少一个阻挡部24。举例来说,配合图8所示,在本实施例中,第二配合件2以相互对应的两个阻挡部24作为示例,但不以此为限。因此,通过阻挡部24的设置,可在枢接滚球32位移的过程中,阻挡外界异物进入容置空间22中,以避免外界异物沾粘、粘附在枢接滚球32的球面320上,而影响、降低可转动结构3感测第一配合件1的准确率。
63.然而,上述所举的例子只是其中一个可行的实施例而并非用以限定本申请。
64.第五实施例
65.请参阅图9与图10所示,本申请第五实施例提供一种机械式活动组件s,包括:第一配合件1、第二配合件2以及可转动结构3。由图9与图1的比较,以及图10与图3的比较可知,本申请第五实施例与第一实施例最大的差别在于:第五实施例的第二配合件2的底面具有凹槽23。
66.更进一步来说,可转动结构3包括枢接轴30以及枢接滚轮31。枢接轴30被容置在凹槽23内,并且枢接滚轮31能枢接地设置在枢接轴30上且部分地裸露在凹槽23外。另外,枢接滚轮31具有能滑动地接触第一配合件1的导电区域11与绝缘区域12两者其中之一的圆弧面310。
67.借此,由于枢接滚轮31具有能滑动地接触第一配合件1的圆弧面310,所以枢接滚轮31与第一配合件1之间的摩擦阻力就会降低,并且枢接滚轮31与第一配合件1两者的磨损
率也会跟着降低。因此,机械式活动组件s的使用寿命与产品可靠度就能够通过枢接滚轮31的使用而得到提升。
68.此外,第二配合件2还具有至少一个阻挡部24。举例来说,配合图8所示,在本实施例中,第二配合件2以相互对应的两个阻挡部24作为示例,但不以此为限。因此,通过阻挡部24的设置,可在枢接滚轮31位移的过程中,阻挡外界异物进入容置空间22中,以避免外界异物沾粘、粘附在枢接滚轮31的圆弧面310上,而影响、降低可转动结构3感测第一配合件1的准确率。
69.然而,上述所举的例子只是其中一个可行的实施例而并非用以限定本申请。
70.第六实施例
71.请参阅图11所示,本申请第六实施例提供一种机械式活动组件s,包括:第一配合件1、第二配合件2以及可转动结构3。由图11与图9的比较可知,本申请第六实施例与第五实施例的最大差别在于:第五实施例所使用的是“具有圆弧面310的枢接滚轮31(如图9所示)”,而第六实施例所使用的是“具有球面320的枢接滚球32(如图11所示)”。因此,依据不同的需求,可转动结构3可以是“使用具有圆弧面310的枢接滚轮31(如图9所示)”,或者是“使用具有球面320的枢接滚球32(如图11所示)”。
72.更进一步来说,如图11所示,可转动结构3包括枢接轴30以及枢接滚球32。枢接轴30被容置在凹槽23内,并且枢接滚球32能枢接地设置在枢接轴30上且部分地裸露在凹槽23外。另外,枢接滚球32具有能滑动地接触第一配合件1的导电区域11与绝缘区域12两者其中之一的球面320。
73.借此,由于枢接滚球32具有能滑动地接触第一配合件1的球面320,所以枢接滚球32与第一配合件1之间的摩擦阻力就会降低,并且枢接滚球32与第一配合件1的磨损率也会跟着降低。因此,机械式活动组件s的使用寿命与产品可靠度就能够通过枢接滚球32的使用而得到提升。
74.此外,第二配合件2还具有至少一个阻挡部24。举例来说,配合图8所示,在本实施例中,第二配合件2以相互对应的两个阻挡部24作为示例,但不以此为限。因此,通过阻挡部24的设置,可在枢接滚球32位移的过程中,阻挡外界异物进入容置空间22中,以避免外界异物沾黏、黏附在枢接滚球32的球面320上,而影响、降低可转动结构3感测第一配合件1的准确率。
75.然而,上述所举的例子只是其中一个可行的实施例而并非用以限定本申请。
76.第七实施例
77.请参阅图12与图13所示,本申请第七实施例提供一种机械式活动组件s,包括:第一配合件1、第二配合件2以及可转动结构3。由图12与图1的比较,以及图13与图3的比较可知,本申请第七实施例与第一实施例最大的差别在于:在第七实施例中,第二配合件2的底面具有凹槽23,并且可转动结构3包括一部分地设置在凹槽23内的滚动球体33。另外,滚动球体33能滚动地设置在凹槽23内,并且滚动球体33具有能滑动地接触第一配合件1的导电区域11与绝缘区域12两者其中之一的球面330。
78.借此,由于滚动球体33具有能滑动地接触第一配合件1的球面330,所以滚动球体33与第一配合件1之间的摩擦阻力就会降低,并且滚动球体33与第一配合件1两者的磨损率也会跟着降低。因此,机械式活动组件s的使用寿命与产品可靠度就能够通过滚动球体33的
使用而得到提升。
79.值得一提的是,在本实施例中,第二配合件2可具有至少一个阻挡部24,阻挡部24可呈环形、弧形、l型、方形或几何形状,本实施例以环形作为示例,但不以此为限。因此,通过阻挡部24的设置,可在滚动球体33位移的过程中,阻挡外界异物进入容置空间22中,以避免外界异物沾粘、粘附在滚动球体33的球面330上,而影响、降低可转动结构3感测第一配合件1的准确率。
80.然而,上述所举的例子只是其中一个可行的实施例而并非用以限定本申请。
81.第八实施例
82.请参阅图14所示,本申请第八实施例提供一种机械式编码器d。机械式编码器d使用一机械式活动组件s,并且机械式活动组件s可以是第一实施例至第七实施例之中的任意一个。举例来说,配合图3与图4所示,机械式活动组件s包括第一配合件1、第二配合件2以及可转动结构3。
83.更进一来说,配合图3、图4以及图14所示,机械式编码器d还进一步包括控制组件。控制组件与机械式活动组件s能相互配合,并且第一导电件1能通过控制组件的带动而相对于第二导电件2进行直线移动或者弧线移动。举例来说,机械式编码器d可以应用于鼠标,机械式活动组件s使用两个可转动结构3,并且控制组件可为一转动件r。
84.然而,上述所举的例子只是其中一个可行的实施例而并非用以限定本申请。
85.第九实施例
86.请参阅图15所示,本申请第九实施例提供一种机械式编码器d。机械式编码器d使用一机械式活动组件s,并且机械式活动组件s可以是第一实施例至第七实施例之中的任意一个。举例来说,配合图3与图4所示,机械式活动组件s包括第一配合件1、第二配合件2以及可转动结构3。
87.更进一来说,配合图3、图4以及图15所示,机械式编码器d还进一步包括控制组件。控制组件与机械式活动组件s能相互配合,并且第一导电件1能通过控制组件的带动而相对于第二导电件2进行直线移动或者弧线移动。
88.举例来说,机械式编码器d可以应用于鼠标,机械式活动组件s使用两个第一配合件1以及两个可转动结构3,并且控制组件可为移动件m。配合图15与图16所示,当两个可转动结构3都接触第一配合件1的绝缘区域12时,机械式编码器d会输出(0,0)的编码信号。当两个可转动结构3分别接触第一配合件1的绝缘区域12与导电区域11时,机械式编码器d会输出(0,1)的编码信号。当两个可转动结构3都接触第一配合件1的导电区域11时,机械式编码器d会输出(1,1)的编码信号。当两个可转动结构3分别接触第一配合件1的导电区域11与绝缘区域12时,机械式编码器d会输出(1,0)的编码信号。因此,第一配合件1能通过移动件m的带动(如箭头所示的方向)而相对于第二配合件2进行直线移动,借此以使机械式活动组件s能依序产生(0,0)、(0,1)、(1,1)、(1,0)的编码信号。
89.此外,配合图17所示,两个第一配合件1也可彼此相叠、连接。并且,两个可转动结构3可相对设置,并各自接触所对应的可转动结构3。藉由两个可转动结构3分别接触所对应的第一配合件1的绝缘区域12与导电区域11,以使机械式编码器d输出相对应的编码信号。
90.值得一提的是,当机械式活动组件s使用三个第一配合件1以及三个可转动结构3时,机械式活动组件s就能依序产生9种的编码信号。因此,第二配合件2与可转动结构3的数
量不以上述所举的例子为限。
91.然而,上述所举的例子只是其中一个可行的实施例而并非用以限定本申请。
92.实施例的有益效果
93.本申请的其中一有益效果在于,本申请所提供的一种机械式编码器d及其机械式活动组件s,能通过“可转动结构3能转动地设置在第二配合件2上且能转动地接触第一配合件1的导电区域11与绝缘区域12两者其中之一”以及“可转动结构3具有能滑动地接触第一配合件1的弧形表面”的技术方案,以降低可转动结构3与第一配合件1之间的摩擦阻力。
94.也就是说,当第二配合件2被带动而使得可转动结构3能滑动地接触第一配合件1时,由于可转动结构3是以其弧形表面滑动地接触第一配合件1,所以可转动结构3与第一配合件1之间的摩擦阻力(或者是摩擦系数)就会降低,并且可转动结构3与第一配合件1两者的磨损率也会跟着降低。因此,机械式活动组件s的使用寿命与产品可靠度就能够通过可转动结构3的使用而得到提升。
95.以上所公开的内容仅为本申请的优选可行实施例,并非因此局限本申请的权利要求书的保护范围,所以凡是运用本申请说明书及附图内容所做的等效技术变化,均包含于本申请的权利要求书的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1