晶圆缺口整平装置的制作方法
:
1.本实用新型是涉及一种晶圆缺口整平装置,尤其涉及一种通过定位件、支撑部及转动部电性连接动力部,动力部电性连接控制单元控制各部件的设置及作动来完成晶圆缺口整平的装置。
背景技术:
:
2.晶圆在制造时会通过留下缺口(notch)来进行定位及判断晶圆的晶向及确定硅片的位置,而此缺口(notch)是在不影响晶圆的状态下刻意在晶圆的外缘边上留下的缺角。
3.现有的晶圆制程中大多是通过激光器来进行晶圆缺口的整平作业,意即将晶圆放置在支载台上,若此时激光发射器所发射的激光束被晶圆阻断则晶圆开始旋转,当转动至晶圆边缘的缺口上时,激光发射器发射出的光束得以通过缺口到达激光接收器中,在经过计算便可得知晶圆上缺口的位置,但此种装置需要通过许多装置协作才能完成,且仅通过激光装置来进行定位容易有错误,无法精准完成定位。
4.此外,另一现有装置是通过将晶圆放入手动的寻边装置中,再通过用户手动旋转把手通过物理的原理来定位出晶圆的缺口以完成整平的目的,但手动的装置已不符合现今制造产线的需求,故需要自动化的设备来解决此缺点。
技术实现要素:
:
5.有鉴于此,本实用新型即在提供一种晶圆缺口整平装置,是包含:本体,具有支撑部,且两端各设置有枢接部,枢接部枢接多个支撑臂;第一转动部,具有驱动轮及辅助轮;定位部,设置有定位件及脱离支点;动力部,具有第一动力件电性连接枢接部用以驱动一或多片支撑臂进行升降作动、第二动力件电性连接转动部使其转动及第三动力件电性连接定位部使其进行升降作动;及控制单元电性连接动力部,用以控制各部件的设置及操作。
6.所述的晶圆缺口整平装置,其中,枢接部更具有第一枢接部及第二枢接部。
7.所述的晶圆缺口整平装置,其中,支撑臂更具有第一方向支撑臂及第二方向支撑臂。
8.所述的晶圆缺口整平装置,其中,第一方向支撑臂及第二方向支撑臂连接时的第一夹角为90度。
9.所述的晶圆缺口整平装置,其中,支撑臂上升时双臂的第二夹角角度大于180度。
10.所述的晶圆缺口整平装置,其中,支撑部及第二方向支撑臂上更设置有分隔梳状板用以固定晶圆。
11.所述的晶圆缺口整平装置,其中,分隔梳状板上更设计为v型凹槽,用以减少与晶圆的接触面积。
12.所述的晶圆缺口整平装置,其中,分隔梳状板的材质是选自于聚四氟乙烯(ptfe)、氟化乙烯丙烯共聚物(fep)、乙烯及四氟乙烯共聚物(etfe)的其中一种低摩擦系数的材质。
13.所述的晶圆缺口整平装置,其中,支撑臂上更进一步包含有第二转动部。
14.所述的晶圆缺口整平装置,其中,驱动轮及辅助轮表面的材质是选自于聚醚醚酮(peek)、聚苯硫醚(pps)、聚酰胺(pa)、缩醛聚甲醛(pom)及聚对苯二甲酸乙二酯(pet)的其中一种高摩擦系数材料。
15.所述的晶圆缺口整平装置,其中,驱动轮及辅助轮上均更具有固定凹槽。
16.所述的晶圆缺口整平装置,其中,第一转动部中仅有驱动轮与第二动力件电性连接。
17.所述的晶圆缺口整平装置,其中,第一转动部更具有皮带连接驱动轮及辅助轮,用以使驱动轮通过皮带带动辅助轮使其转动。
18.所述的晶圆缺口整平装置,其中,定位件是选自于圆柱体、三角柱体、片状及四角条的其中一种构型。
19.所述的晶圆缺口整平装置,其中,定位件及脱离支点的材质是选自于聚四氟乙烯(ptfe)、氟化乙烯丙烯共聚物(fep)、乙烯及四氟乙烯共聚物(etfe)的其中一种低摩擦系数的材质。
20.所述的晶圆缺口整平装置,其中,第一动力件、第二动力件及第三动力件更具有马达及齿轮组件,用以分别驱动枢接部、转动部及定位部。
21.所述的晶圆缺口整平装置,其中,更具有激光定位装置,用以侦测晶圆的缺口是否全数整平定位。
22.所述的晶圆缺口整平装置,其中,激光定位装置更具有发射部及接收部,设置于平行排列的多个壁面。
23.所述的晶圆缺口整平装置,其中,激光定位装置装设在两相对壁面,发射部所发射的激光束与驱动轮架设方向平行且激光束通过驱动轮及晶圆的间隙。
24.所述的晶圆缺口整平装置,其中,激光定位装置装设在本体内壁两侧,发射部装设在枢接部底部向下延伸的内壁一端,接收器装设在枢接部底部向下延伸的内壁另一端,且高度位于定位件进行定位晶圆缺口时的位置。
25.如此,通过使用本实用新型的晶圆缺口整平装置,便可以通过物理的装置来精准地寻找出晶圆缺口的位置,再通过激光装置的辅助,让定位的作动可以更加的确实,特别要说的是,本实用新型将自动化导入晶圆缺口整平装置,使其可以与现今自动化生产线完美的结合,据此,通过此装置加速完成大量晶圆缺口整平的作业。
附图说明:
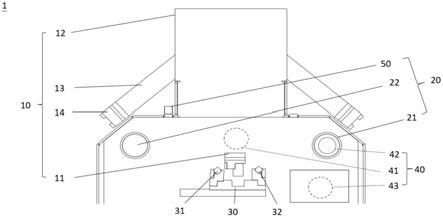
26.图1是本实用新型的晶圆缺口整平装置侧面透视图;
27.图2是本实用新型的晶圆缺口整平装置立体图;
28.图3是本实用新型的支撑臂局部放大图;
29.图4是本实用新型的晶圆缺口整平装置支撑臂上升示意图;
30.图5是本实用新型的晶圆缺口整平装置尚未启动示意图;
31.图6是本实用新型的晶圆缺口整平装置固定晶圆示意图;
32.图7是本实用新型的晶圆缺口整平装置定位件上升就绪示意图;
33.图8是本实用新型的晶圆缺口整平装置完成整平示意图;
34.图9是本实用新型的晶圆缺口整平装置回复示意图。
35.附图标记:
[0036]1ꢀꢀꢀꢀꢀꢀ
晶圆缺口整平装置
[0037]
10
ꢀꢀꢀꢀꢀ
本体
[0038]
11
ꢀꢀꢀꢀꢀ
支撑部
[0039]
12
ꢀꢀꢀꢀꢀ
枢接部
[0040]
121
ꢀꢀꢀꢀ
第一枢接部
[0041]
122
ꢀꢀꢀꢀ
第二枢接部
[0042]
13
ꢀꢀꢀꢀꢀ
支撑臂
[0043]
131
ꢀꢀꢀꢀ
第一方向支撑臂
[0044]
132
ꢀꢀꢀꢀ
第二方向支撑臂
[0045]
14
ꢀꢀꢀꢀꢀ
分隔梳状板
[0046]
20
ꢀꢀꢀꢀꢀ
第一转动部
[0047]
21
ꢀꢀꢀꢀꢀ
驱动轮
[0048]
22
ꢀꢀꢀꢀꢀ
辅助轮
[0049]
23
ꢀꢀꢀꢀꢀ
固定凹槽
[0050]
30
ꢀꢀꢀꢀꢀ
定位部
[0051]
31
ꢀꢀꢀꢀꢀ
定位件
[0052]
32
ꢀꢀꢀꢀꢀ
脱离支点
[0053]
40
ꢀꢀꢀꢀꢀ
动力部
[0054]
41
ꢀꢀꢀꢀꢀ
第一动力件
[0055]
42
ꢀꢀꢀꢀꢀ
第二动力件
[0056]
43
ꢀꢀꢀꢀꢀ
第三动力件
[0057]
50
ꢀꢀꢀꢀꢀ
控制单元
[0058]
60
ꢀꢀꢀꢀꢀ
激光定位装置
[0059]
61
ꢀꢀꢀꢀꢀ
发射部
[0060]
62
ꢀꢀꢀꢀꢀ
接收部
[0061]
a
ꢀꢀꢀꢀꢀꢀ
第一夹角
[0062]
b
ꢀꢀꢀꢀꢀꢀ
第二夹角
具体实施方式:
[0063]
由于本实用新型公开一种晶圆缺口整平装置,其中所使用的各结构连接、连动关系及原理为本领域普通知识人员所能明了,故以下中文的说明,不再做完整描述。同时,以下文中所对照的图式,是表达与本实用新型特征有关的结构示意,并未亦不需要依据实际尺寸完整绘制,在先声明。
[0064]
请参考图1,为本实用新型所提出的晶圆缺口整平装置1一示意图。本实用新型提出的晶圆缺口整平装置1,是包含:本体10,本体10为主要架设各种本实用新型所需装置及部件的机台,为一中空且开口向上的机台,其机台中设置有支撑部11,支撑部11为长条形构件,用以放置待整平的一或多片晶圆,支撑部11支撑于晶圆中心底部的位置,且本体10其中不相邻两侧顶部各设置有枢接部12,枢接部12用以枢接两支支撑臂13,枢接部12左侧及右
侧各枢接有支撑臂13,支撑臂13用以辅助支撑部11加强固定一或多片待整平的晶圆,且可有效防止晶圆在整平的过程中偏移及滑落;第一转动部20,具有驱动轮21及辅助轮22,驱动轮21及辅助轮22为圆柱的构型,驱动轮21与辅助轮22为等高平行的设置,第一转动部20与支撑部11平行设置,且略高于支撑部11,用以驱使晶圆转动;定位部30为长条形载盘机构,可执行上升及下降的作动,定位部30一侧长边顶部装设有定位件31,定位件31即为缺口寻找装置(finder),为长条形的构型,且定位件31设置于定位部30上时,可通过调整器依照使用者需求来调整定位件31设置时的角度,定位部30另一侧则设置有脱离支点32,脱离支点32为长条形构件,用以辅助固定已被定位件31寻找出缺口的晶圆;动力部40,动力部40更具有第一动力件41电性连接枢接部12,用以提供动力使枢接部12驱动支撑臂13进行升降作动、第二动力件42电性连接第一转动部20,用以提供动力使驱动轮21及辅助轮22进行转动、第三动力件43电性连接定位部30,用以驱动定位部30的载盘机构进行升降的作动;及控制单元50,控制单元50电性连接动力部40,用以控制晶圆缺口整平装置1上各部件的定位设置,再依照装置上所设置的各部件操作排程来使其作动,以达成晶圆缺口整平装置1所欲完成的功效。
[0065]
请参考图2,为本实用新型所提出的晶圆缺口整平装置立体图。枢接部12更具有第一枢接部121及第二枢接部122,分别设置于本体10不相邻的两侧顶部,用以枢接左右两侧支撑臂13,并控制左右两侧支撑臂13上升及下降的作动,其中,第一枢接部121及第二枢接部122的距离即为晶圆缺口整平装置1的整体长度,且一或多片晶圆与枢接部12平行排列。
[0066]
请继续参考图2,支撑臂13的数量为两支,且支撑臂13更由一对第一方向支撑臂131及一第二方向支撑臂132所组成,其中一支第一方向支撑臂131一端枢接第一枢接部121左侧,另一端连接第二方向支撑臂132,另一支第一方向支撑臂131一端连接第二枢接部122左侧,另一端则连接第二方向支撑臂132,枢接部12右侧与支撑臂13的结构连接关是与左侧相同,其中,第一方向支撑臂131的长度略大于晶圆的半径长度,且多个枢接部12连接两支支撑臂13后所界定出来的范围即为可以放置一或多片晶圆的范围。
[0067]
请参考图3,第一方向支撑臂131与第二方向支撑臂132连接时的第一夹角a为90度,第一方向支撑臂131一端因连接枢接部12,会与驱动来源直接接触,且支撑臂13的构型皆为长方体的构型,所以支撑臂13最稳定的连接方式即是将第一方向支撑臂131与第二方向支撑臂132连接的第一夹角a设置为90度。
[0068]
请参考图4,枢接部12左右两侧第一方向支撑臂131上升时的双臂下缘第二夹角b大于180度,由于支撑臂13的作用是在辅助支撑部11固定晶圆,且形成最稳固的三点固定态样,因为位于枢接部12左右两侧的第一方向支撑臂131需连动枢接部12左右两侧第二方向支撑臂132上升至晶圆上部左右两侧外缘,再配合晶圆底部的支撑部11,据此来达到三点固定的态样,若支撑臂13需上升并达到上述条件则其枢接部12左右两侧第一方向支撑臂131上升后,其下缘第二夹角需大于180度。
[0069]
请参考图2,支撑部11与第二方向支撑臂122上更设置有分隔梳状板14,由于晶圆缺口整平装置1需同时进行大量晶圆整平的作业,所以在放置多片晶圆时为了避免多片晶圆间在装置时发生碰撞,且防止晶圆在转动的过程中滑拖出本装置,所以特别在支撑部11(即放置晶圆的底座)及第二方向支撑臂132上特别装设有分隔梳状板14,其具有一格一格的凹槽,且其凹槽的宽度略大于晶圆的厚度,除此之外,支撑部11及第二方向支撑臂132上
的分隔梳状板14其装设位置需相对应,即是当晶圆放置入支撑部11上分离梳状板14的第一格凹槽时,其他两支第二方向支撑臂132上分离梳状板14的第一格凹槽需同时固定同一晶圆,据此,其他多个晶圆依此类推在放置时也需符合上述设置条件。
[0070]
特别要说的是,为了避免磨损晶圆,本设备在进行整平作业时需要尽可能的减少分隔梳状板14与晶圆接触的面积,所以分隔梳状板14上的凹槽特别设计为v型凹槽,由于v型可将晶圆放置于v型凹槽最底端的端点上,此时分离梳状板14与晶圆的接触范围为最少的接触面积,减少了凹槽中两侧槽面与晶圆面上的接触及摩擦,据此可以有效减少分隔梳状板14与晶圆的接触面积,将晶圆在整平时所造成磨损的可能性降至最低。
[0071]
另外,为了让分隔梳状板14尽可能的降低磨损晶圆,在制造分隔梳状板14时特别选用低摩擦系数的材料,其材料是选自于:一聚四氟乙烯(ptfe)、一氟化乙烯丙烯共聚物(fep)、一乙烯及四氟乙烯共聚物(etfe)等低摩擦系数的材料,用以降低分隔梳状板14与晶圆之间的摩擦,减少在作动时磨损晶圆的机会。
[0072]
值得一提的是,在另一实施态样中,支撑臂13上更装设有第二转动部(未附图),第二转动部的位置装设于第二方向支撑臂132上,此设计即是将晶圆缺口整平装置1中驱动晶圆的动力移动至整个设备的上方,有别于上一实施方式仅通过第一转动部20驱动晶圆时,由于驱动的位置是带动晶圆下半部,整批待整平的晶圆因重力关系给予第一转动部20较大的下压力,故本实施方式是更枢设有第二转动部于第二方向支撑臂132上,藉此给予另一动力减轻第一转动部20的负荷。
[0073]
除此之外,驱动轮21及辅助轮22表面的材质是选自于聚醚醚酮(peek)、聚苯硫醚(pps)、聚酰胺(pa)、缩醛聚甲醛(pom)及聚对苯二甲酸乙二酯(pet)的其中一种高摩擦系数材料,由于驱动轮21及辅助轮22,需要通过驱动轮21及辅助轮22的表面与晶圆外缘产生摩擦力来转动晶圆,所以驱动轮21及辅助轮22的材质需设置为高摩擦系数材料,据此将驱动轮21及辅助轮22所产生的动力完整的用在转动晶圆上,避免不必要的动力消耗,同时避免因为动能的耗损造成设备材料的损耗,进一步避免不必要的震动所造成晶圆的碰撞。
[0074]
请继续参考图2,驱动轮21及辅助轮22表面上更具有固定凹槽23,固定凹槽23的宽度些微大于晶圆的厚度,此设计用以增强固定,避免晶圆在转动时所造成的位移,将晶圆一片一片的放置入固定凹槽23后,不但可以在驱动晶圆时更准确地将动力提供给固定凹槽23中晶圆上,还可以避免晶圆在转动时发生位移,造成不必要的碰撞,亦能确保整批晶圆能一次性的整平,减少因受力不平均而产生的整平误差。
[0075]
在一实施例中,第一动力部20中仅有驱动轮21与第二动力件42电性连接,即辅助轮22不具备动力,第一转动部20在带动晶圆时,仅通过第二动力件42电性连接驱动轮21使其转动,此时辅助轮22仅通过其高摩擦系数材质的表面通过承载的晶圆带动转动,用以辅助驱动轮21,此外,驱动轮21与辅助轮22在转动时的方向,必定为相同的转动方向,若驱动轮21的转动方向为顺时钟转动,则辅助轮22的转动方向为顺时钟,据此才能将驱动轮21及辅助轮22上所承载的晶圆转动。
[0076]
在另一实施例中,为了使驱动轮21及辅助轮22在运作时配合的更妥当,第一转动部20更具有皮带,装设在驱动轮21及辅助轮22轴承上,用以连接驱动轮21及辅助轮22使皮带将驱动轮21所发出的动力同步连动辅助轮22,使辅助轮22转动的速度及速率与驱动轮21同步。
[0077]
除了上述的构型外,定位件31可依照使用需求变更其构型,其形状至少为圆条、三角条、片条、四角条的其中一种构型,其中定位件31若为圆条构型,则相较于其他构型的条体更能减少晶圆在整平时所造成缺口的损坏,三角条及四角条在作为定位件31时可以更稳固的将晶圆上的缺口固定于定位件31上,片条在作为定位件31时,则是应用在晶圆重量较轻或材质较脆弱时,通过片条的设计将定位件31与晶圆缺口精准的定位。
[0078]
为了使晶圆缺口整平装置1运作得更顺畅,定位件31及脱离支点32的材质是选自于聚四氟乙烯(ptfe)、氟化乙烯丙烯共聚物(fep)、乙烯及四氟乙烯共聚物(etfe)的其中一种低摩擦系数的材质,由于定位件31及脱离支点32在晶圆转动时与晶圆的边缘轻触,特别是定位件31会将晶圆些微上顶,所以为了避免定位件31在寻找晶圆缺口时与晶圆产生摩擦,形成不必要的磨损,故将定位件31及脱离支点32的材质特别挑选为低摩擦系数的材质。
[0079]
在此实施例中,第一动力件41、第二动力件42及第三动力件43更具有马达及齿轮组件(未图标),通过马达产生的动力带动齿轮组件使其连动设备,据此,第一动力件41通过马达搭配齿轮组件驱动枢接部12,使枢接在枢接部12左右两侧支撑臂13进行升降作动,第二动力件42通过马达与齿轮组件的协同运作驱动第一转动部20中驱动轮21,第三动力件43通过马达与齿轮组件的协同运作驱动定位部30进行升降的作动。
[0080]
请参考图2,晶圆缺口整平装置1中更具有激光定位装置60,用以侦测半导体晶圆缺口是否全数整平定位,除了通过定位件31进行物理的缺口整平定位外,更设置了激光定位装置60,通过激光装置所发射出的激光束来确认通过整平后的晶圆上缺口是否全数整平定位。
[0081]
特别要说的是,激光定位装置60更具有发射部61及接收部62,发射部61用以发射出激光束,接收部62用以接收激光束,发射部61及接收部62分别设置于平行排列的多个壁面,其中发射部61装设于一侧壁面与第一枢接部121平行,接收部62装设于另一侧壁面与第二枢接部122平行,发射部61发射出激光束通过多个晶圆整平缺口至接收部62,以完成缺口整平定位。
[0082]
请同时参考图1及图2,激光定位装置60装设在本体10两侧内壁,发射部61装设在第一枢接部121底部向下延伸的本体10内壁一端,接收器62装设在第二枢接部122底部向下延伸的本体10内壁另一端,当晶圆放置于晶圆缺口整平装置1待整平时,晶圆的周缘将会为于定位件31上方,当需进行晶圆缺口整平时,定位件31才会上升并轻触晶圆周缘,据此,将激光定位装置60设置的高度,设置在定位件31进行定位晶圆缺口时的位置高度,由于晶圆缺口整平装置1在完成整平晶圆后,定位件31向下脱离晶圆缺口,此时,整平后缺口应平行排列并对齐成一直线,激光定位装置60所发出的激光束则可通过,用以再次确认整平后的缺口是否有确实对齐,在完成整平晶圆后,可依据使用者需求由底部定位件31处将晶圆缺口转至任何一个角度。
[0083]
除此之外,激光定位装置60装设在两相对应壁面,发射部61所发射的激光束与驱动轮21架设方向平行,且激光束通过驱动轮21及半导体晶圆的碰触点,当晶圆在未被整平前,激光束照射在晶圆面上,当装置开始运转后由于晶圆在被定位件31找到缺口后定位件31会卡入缺口中,晶圆会些微下降并脱离驱动轮21,此时晶圆边缘与驱动轮21之间存在有间隙,此间隙供激光束通过,且晶圆些微落下并落在脱离支点32上,所以将激光定位装置60装设于此就能在所有晶圆完成定位并全数脱离驱动轮21后,使发射部61所发出的激光束通
过晶圆及驱动轮21之间的间隙到达接收部62,据此,激光定位装置60就能判断多个晶圆是否已完成定位。
[0084]
在此实施例中,本实用新型晶圆缺口整平装置1的作动方式如下:请继续参考图5,将待整平的一或多片晶圆放置于支撑部11及第一转动部20上,并通过左右两支支撑臂13辅助固定,此时晶圆通过支撑部11、驱动轮21、辅助轮22及支撑臂13固定于晶圆缺口整平装置1上;
[0085]
请同时参考图1及图6,放置完毕后,用户通过操作控制单元50电性连接动力部40中第一动力部41电性连接枢接部12,枢接部12驱动位于枢接部12左右两侧两支支撑臂13由晶圆左右两侧下部外缘上升至两侧上部外缘,此时左右两侧支撑臂13与支撑部11形成三点固定的设置来将晶圆进行定位的固定。
[0086]
请同时参考图1及图7,固定后,动力部40中第二动力件42电性连接设置于本体10底部的定位部30,驱动定位部30上升,使定位件31(finder)轻微将晶圆顶起,同时,脱离支点32同步随着定位部30上升但未触碰到晶圆,且原本与晶圆接触的辅助轮22因为定位件31(finder)将晶圆顶起所以与晶圆脱离,完成上述定位后,第三动力件43电性连接第一转动部20,驱动驱动轮21带动晶圆转动。
[0087]
请参考图8,随着晶圆的转动,在定位件31卡入晶圆边缘的缺口(notch)造成晶圆位置向下位移,此时脱离支点32顶住向下位移的晶圆并将晶圆顶起,同时晶圆因向下位移所以脱离与驱动轮21接触并停止转动,直到晶圆缺口整平装置1上所有多个晶圆皆已完成上述作动并皆位移至脱离支点32后,完成整平的流程。
[0088]
请参考图9,当所有多个晶圆皆脱离驱动轮21后且皆固定于定位件31及脱离支点32时,定位部30电性连接第三动力件43进行下降的作动,此时定位件31及脱离支点32脱离晶圆,同时晶圆落下,并由驱动轮21及辅助轮22支撑,之后再通过驱动轮21转动将定位完成晶圆缺口转至晶圆正上方,以完成晶圆缺口整平装置的所有作动程序。
[0089]
综上所述,本实用新型通过将待整平晶圆放置于支撑部11上,同时通过支撑部11协同第一转动部20的驱动轮21及辅助轮22支撑固定待整平晶圆,并通过操作控制单元50电性连接动力部40,通过动力部40电性连接各部件使其作动;基于上述设置,本装置在作动时先是通过支撑臂13上升固定晶圆,此时定位部30上升,驱使定位部30上的定位件31将晶圆些微顶起,使晶圆脱离辅助轮22上,接着通过驱动轮21旋转带动晶圆转动至定位件31找出晶圆上的缺口,当晶圆的缺口落在定位件31上时,晶圆些微落下至脱离支点32,同时脱离驱动轮21,待晶圆完成定位后,定位部31下降,使晶圆脱离定位部31并落在第一转动部20上,再通过驱动轮21转动晶圆,将位于晶圆底部的缺口转至晶圆顶部,以完成晶圆缺口整平的作动。
[0090]
以上所述仅为本实用新型的较佳实施例,并非用以限定本实用新型的权利要求;同时以上的描述,对于熟知本技术领域的普通知识人员应可明了及实施,因此其他未脱离本实用新型所公开的精神下所完成的等效改变或修饰,均应包含在权利要求中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1