一种用于轨道交通的智能型直流快速断路器的制作方法
1.本发明属于轨道交通直流供电技术领域,尤其涉及一种用于轨道交通的智能型直流快速断路器。
背景技术:
2.目前市场上的主流断路器,仅对直流牵引供电系统起分断、短路和接通作用,缺少对断路器自身的状态监测。只能配合直流综合测控保护装置检测断路器的分合闸速度、弹跳及短路电流等很少的数据,无法判断断路器在长时间运行后的健康状况,以及断路器的剩余寿命,增加了运维工作人员的工作难度及运维成本。
技术实现要素:
3.针对现有技术中的上述不足,本发明提供的一种用于轨道交通的智能型直流快速断路器解决了对开关设备温度状态、机构特性状态、线圈分合闸电流等进行多维度的运行监测、数据收集、数据分析、判断断路器的健康状况以及所存在的隐患,实现断路器的状态自感知的问题。
4.为了达到上述发明目的,本发明采用的技术方案为:
5.本方案提供一种用于轨道交通的智能型直流快速断路器,包括断路器本体,以及分别设于断路器本体上的触头动作采集模块、机构动作采集模块、光纤温度传感器模块、航空插头模块、智能运维装置、人机界面,以及设于智能运维装置内部的电参量传感器模块;
6.所述触头动作采集模块设于断路器本体下端一侧;所述机构动作采集模块设于断路器本体中部一侧;所述光纤温度传感器模块设于断路器本体上端;所述航空插头模块设于断路器本体下端靠近触头动作采集模块一侧的外部;所述智能运维装置设于断路器本体下端另一侧;所述人机界面设于航空插头模块上侧,并与智能运维装置连接。
7.本发明的有益效果为:本方案提供的用于轨道交通的智能型直流快速断路器能读取并分析数据,预测断路器的剩余寿命,提升操作连续性和可靠性,延长维修周期、降低维护成本。
8.进一步地,所述断路器本体包括永磁机构、动铁芯、驱动拨叉、动触头、静触头、运算放大器、防尘罩、万向连接头和绝缘连杆;
9.所述永磁机构与机构动作采集模块的一端连接;所述动铁芯与机构动作采集模块的另一端连接;所述驱动拨叉一端与永磁机构固定连接,其另一端动触头接触;所述静触头与动触头相对设置,且在断路器合闸时接触;所述运算放大器一端与智能运维装置的一端连接,其另一端与动作采集模块连接;所述万向连接头一端与动作采集模块连接,其另一端与绝缘连杆连接;所述防尘罩设于动作采集模块和万向连接头外部。
10.采用上述进一步方案的有益效果为:通过断路器本体实现对直流牵引供电系统分断、短路和接通,并在断路器本体上设有触头动作采集模块、机构动作采集模块、光纤温度传感器模块、航空插头模块和智能运维装置。
11.进一步地,所述航空插头模块包括相邻设置的强电插头和弱电插头。
12.采用上述进一步方案的有益效果为:采用航空强电插头和航空弱电插头,避免强电对弱电产生的干扰,尽可能的保证信号输出的稳定性。
13.进一步地,所述智能运维装置包括fpga主处理器子模块、in out信号采集子模块、ad模数转换子模块、arm407控制子模块、arm9串口通信子模块和power电源转换子模块;
14.所述power电源转换子模块分别与fpga主处理器子模块、in out信号采集子模块、ad模数转换子模块、arm407控制子模块以及arm9串口通信子模块连接;所述in out信号采集子模块分别与触头动作采集模块、机构动作采集模块、光纤温度传感器模块、电参量传感器模块、ad模数转换子模块、arm407控制子模块和arm9串口通信子模块连接;所述ad模数转换子模块分别与fpga主处理器子模块和arm407控制子模块连接;所述fpga主处理器子模块与arm407控制子模块连接;所述arm407控制子模块与arm9串口通信子模块连接。
15.采用上述进一步方案的有益效果为:所述智能运维装置通过采集断路器主导电部件温度、断路器操作回路电参量、断路器动作特性参数等信息,在完成最近一次数据采样后立即进行数据分析和比对,发现异常时即可触发预警记录,当预警记录达到约定预警次数时即发出预警信息,预警次数达到故障限值时即刻报故障,并提供可能的故障点及故障原因。
16.进一步地,所述power电源转换子模块分别为fpga主处理器子模块、in out信号采集子模块、ad模数转换子模块、arm407控制子模块和arm9串口通信子模块供电。
17.采用上述进一步方案的有益效果为:通过power电源转换子模块实现智能运维装置正常工作的供电。
18.进一步地,所述fpga主处理器子模块采用以太网接口和数字量输入di/do接口通信。
19.采用上述进一步方案的有益效果为:通过以太网接口实现智能运维装置与后台的通信,并通过di/do接口实现继电器输出。
附图说明
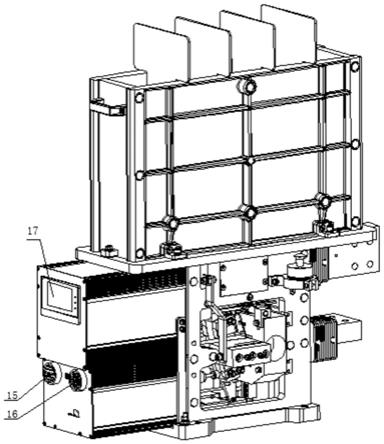
20.图1为本发明实施例中用于轨道交通的智能型直流快速断路器的结构示意图。
21.图2为本发明实施例中用于轨道交通的智能型直流快速断路器处于分闸位置的结构示意图。
22.图3为本发明实施例中用于轨道交通的智能型直流快速断路器处于合闸位置的结构示意图。
23.图4为本发明实施例中智能运维装置中各子模块电路连接原理图。
24.其中:1、触头动作采集模块;2、机构动作采集模块;3、光纤温度传感器模块;4、电参量传感器模块;5、智能运维装置;6、永磁机构;7、动铁芯;8、驱动拨叉;9、动触头;10、静触头;11、运算放大器;12、防尘罩;13、万向连接头;14、绝缘连杆;15、强电插头;16、弱点插头;17人机界面。
具体实施方式
25.下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发
明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
26.如图1、图2和图3所示,在本发明的一个实施例中,本发明提供一种用于轨道交通的智能型直流快速断路器,包括断路器本体,以及设于断路器本体上的触头动作采集模块1、机构动作采集模块2、光纤温度传感器模块3、航空插头模块和智能运维装置5、人机界面17,以及设于智能运维装置5内部的电参量传感器模块4;
27.所述触头动作采集模块1设于断路器本体下端一侧;所述机构动作采集模块2设于断路器本体中部一侧;所述光纤温度传感器模块3设于断路器本体上端;所述航空插头模块设于断路器本体下端靠近触头动作采集模块1一侧的外部;所述智能运维装置5设于断路器本体下端另一侧;所述人机界面17设于航空插头模块上侧,并与智能运维装置连接;
28.所述断路器本体,用于对直流牵引供电系统分断、短路和接通;所述触头动作采集模块1,用于通过触点运动波形采集合闸时间、分闸时间、合闸弹跳、分闸反弹和触头开距等参数;所述机构动作采集模块2,用于通过机构运动波形采集合闸时间、分闸时间、合闸弹跳和分闸反弹等参数;所述光纤温度传感器模块3,用于检测断路器运行时的温升;所述电参量传感器模块4,用于采集断路器分合闸时通过线圈的电流;所述航空插头模块,用于为断路器供电;所述智能运维装置5,用于采集、分析和对比断路器运行时的温升、电参量参数和动作特性参数;记录断路器历史故障数据、发出预警信息并报告故障,以及提供可能的故障点和故障原因;
29.所述电参量参数为电参量传感器模块4采集到的断路器分合闸时通过的电流;所述动作特性参数为通过触头动作传感器模块1和机构动作传感器模块2得到的断路器超程和触头开距,其中断路器超程以电压形式输入至智能运维装置5。
30.所述断路器本体包括永磁机构6、动铁芯7、驱动拨叉8、动触头9、静触头10、运算放大器11、防尘罩12、万向连接头13和绝缘连杆14;
31.所述永磁机构6与机构动作采集模块2的一端连接;所述动铁芯7与机构动作采集模块2的另一端连接;所述驱动拨叉8一端与永磁机构6固定连接,其另一端动触头9接触;所述静触头10与动触头9相对设置,且在断路器合闸时接触;所述运算放大器11一端与智能运维装置5的一端连接,其另一端与动作采集模块1连接;所述万向连接头13一端与动作采集模块1连接,其另一端与绝缘连杆14连接;所述防尘罩12设于动作采集模块1和万向连接头13外部。
32.所述航空插头模块包括相邻设置的强电插头15和弱电插头16。
33.如图4所示,所述智能运维装置5包括fpga主处理器子模块、in out信号采集子模块、ad模数转换子模块、arm407控制子模块、arm9串口通信子模块和power电源转换子模块;
34.所述power电源转换子模块分别与fpga主处理器子模块、in out信号采集子模块、ad模数转换子模块、arm407控制子模块以及arm9串口通信子模块连接;所述in out信号采集子模块分别与触头动作采集模块1、机构动作采集模块2、光纤温度传感器模块3、电参量传感器模块4、ad模数转换子模块、arm407控制子模块和arm9串口通信子模块连接;所述ad模数转换子模块分别与fpga主处理器子模块和arm407控制子模块连接;所述fpga主处理器子模块与arm407控制子模块连接;所述arm407控制子模块与arm9串口通信子模块连接;
35.所述智能运维装置5通过采集断路器主导电部件温度、断路器操作回路电参量、断路器动作特性参数等信息,在完成最近一次数据采样后立即进行数据分析和比对,发现异常时即可触发预警记录,当预警记录达到约定预警次数时即发出预警信息,预警次数达到故障限值时即刻报故障,并提供可能的故障点及故障原因。
36.所述power电源转换子模块分别为fpga主处理器子模块、in out信号采集子模块、ad模数转换子模块、arm407控制子模块和arm9串口通信子模块供电。
37.所述fpga主处理器子模块采用以太网接口和数字量输入di/do接口通信;通过以太网接口实现智能运维装置与后台的通信,并通过di/do接口实现继电器输出。
38.所述智能运维装置5采集断路器主导电部件温度、断路器操作回路电参量、断路器动作特性参数等信息,在完成最近一次数据采样后立即进行数据分析和比对,发现异常时即可触发预警记录,当预警记录达到约定预警次数时即发出预警信息,预警次数达到故障限值时即刻报故障,并提供可能的故障点及故障原因;
39.所述智能运维装置5中fpga主处理器子模块分别与ad模数转换子模块、power电源转换子模块和arm407控制子模块的电路原理连接关系如表1所示:
40.表1
41.42.[0043][0044]
所述模拟量输入模块包括in out信号采集子模块分别与触头动作传感器模块、机构动作传感器模块、光纤温度传感器模块和电参量传感器模块;所述智能运维装置5中in out信号采集子模块分别与模拟量输入模块、power电源转换子模块、ad模数转换子模块、arm407控制子模块和arm9串口通信子模块的电路原理连接关系如表2所示:
[0045]
表2
[0046]
[0047]
[0048][0049][0050]
所述智能运维装置5中ad模数转换子模块分别与power电源转换子模块和arm407控制子模块的电路原理连接关系如表3所示:
[0051]
表3
[0052][0053][0054]
所述智能运维装置5中arm407控制子模块分别与power电源转换子模块和arm9串口通信子模块的电路原理连接关系如表4所示:
[0055]
表4
[0056]
[0057][0058]
所述智能运维装置5中arm9串口通信子模块分别与power电源转换子模块和人机界面的电路原理连接关系如表5所示:
[0059]
表5
[0060]
[0061][0062]
本发明工作原理为:通过航空插头模块接通电源,使断路器正常工作;通过人机界面17和智能运维装置5操控断路器,当断路器本体执行合闸命令时,断路器由永磁机构6的动铁芯7驱动拨叉12推动动触头9顺时针旋转接触静触头10,完成合闸动作;所述触头动作采集模块1通过触点运动波形采集合闸时间、分闸时间、合闸弹跳、分闸反弹和触头开距等参数;所述机构动作采集模块2通过机构运动波形采集合闸时间、分闸时间、合闸弹跳和分闸反弹等参数;利用触点运动波形和机构运动波形计算得到断路器本体的超程;随着频繁地操作断路器本体,断路器本体产生一定的磨损,且断路器的超程发生变化;光纤温度传感器模块3实时监测断路器的温升,电参量传感器模块4采集每次分合闸时通过线圈的电流;所述智能运维装置5通过触头磨损、触头压力、断路器温升以及分合闸电流的变化,即可判断断路器的健康状态,并预测断路器的剩余寿命,其中,所述触头磨损由触头开距得到,所述触头压力由断路器超程得到;同时,所述智能运维装置5通过采集断路器主导电部件温度、断路器操作回路电参量、断路器动作特性参数等信息,在完成最近一次数据采样后立即进行数据分析和比对,发现异常时即可触发预警记录,当预警记录达到预设预警次数时,通过人机界面17发出预警信息,预警次数达到故障限值时,即刻通过人机界面17报故障,并提
供可能的故障点及故障原因。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1