传感器、测量水平度的方法及非暂时性计算机可读介质与流程
传感器、测量水平度的方法及非暂时性计算机可读介质
1.相关申请的交叉引用
2.本技术要求于2020年12月31日提交韩国专利局的、申请号为10-2020-0189440的韩国专利申请的优先权和权益,其全部内容通过引用结合在本技术中。
技术领域
3.本文所述发明概念的实施例是关于用于测量设置于伴随温度改变的气氛中的基板支承构件的水平度的基板式传感器以及通过使用基板式传感器测量水平度的方法。
背景技术:
4.通常,半导体装置是通过使用诸如晶圆的基板来制造。具体而言,半导体装置是通过执行沉积工艺、光学光刻工艺、蚀刻工艺、及类似者来制造,以在基板的上表面上形成精细电路图案。
5.由于在其上形成电路图案的基板上表面在工艺执行期间可能受到污染,故可执行清洗工艺以移除异物。
6.近年来,超临界流体已用于清洗基板或显影基板的工艺中。根据实例,可通过使用异丙醇(下文称为ipa)清洗基板的上表面、并通过供应超临界状态的二氧化碳(co2)至基板的上表面移除留在基板上的ipa来执行清洗工艺。
7.使用超临界流体的工艺使用提供处理空间的容器,其中工艺流体可保持在高温/高压超临界相。举例而言,当二氧化碳(co2)以超临界状态供应至基板上表面时,容器的处理空间必须保持在二氧化碳的临界温度或更高及临界压力或更高。当处理空间保持在临界温度或更高及临界压力或更高时,支承设置于处理空间中的晶圆的基板支承构件的晶圆的水平状态不能保持,但当前发明者认知到晶圆的水平状态不能在容器内部由基板支承构件直接测量。
技术实现要素:
8.本发明概念的目的提供一种用于测量水平度的基板式传感器,该基板式传感器能够测量位于提供高温/高压气氛的容器内部的基板支承构件的空闲状态、及通过使用超临界流体处理基板(举例而言,晶圆)的工艺期间,基板支承构件的水平状态,以及通过使用基板式传感器测量水平度的方法。
9.本发明概念的目的亦提供用于测量水平度的基板式传感器,其能够以0.1度或更小的单位测量位于提供高温/高压气氛的容器内部的基板支承构件的空闲状态及通过使用超临界流体处理基板(例如,晶圆)的工艺期间,基板支承构件的水平状态,以及通过使用基板式传感器测量水平度的方法。
10.本发明概念的目的提供一种基板处理方法及基板处理设备,通过前述方法及设备,当通过使用超临界流体清洗基板时,可以提高清洗效率。
11.本发明概念的目的不限于此,熟习此项技术者可自以下描述清楚地理解本发明的
其他未提及目的。
12.本发明概念提供设置于伴随温度改变的气氛中的基板式传感器,用于测量支承基板的支承构件的水平度。在实施例中,基板式传感器可包括具有基板形状的基座、设置于基座中包括3个以上轴加速度传感器或6个以上轴惯性测量单元(imu)的一个或多个传感器、接收由一个或多个传感器收集的数据的接收器、及将电力提供至一个或多个传感器及接收器的电源。
13.在实施例中,基座可具有与基板的尺寸实质上相同的实体尺寸。
14.在实施例中,可设置多个传感器,且第二传感器可相对于基座中心设置于与第一传感器相对180度的位置处。
15.在实施例中,基板式传感器可进一步包括发射器,用于将接收器接收到的数据发送至外部。
16.在实施例中,支承构件可包括多个支承销,这些支承销将基板与支承构件的平面以特定间隔间隔开,且一个或多个传感器可位于对应于支承销中的任意一者或多者的位置处。
17.在实施例中,一个或多个传感器可产生根据暴露温度而改变的特有误差。
18.本发明概念亦提供一种通过使用基板式传感器测量水平度的方法。在实施例中,前述方法可包括:步骤(1)将基板式传感器以第一角度定位于支承构件中,步骤(2)将由步骤(1)中一个或多个传感器收集的数据作为第一数据接收,步骤(3)将基板式传感器以不同于第一角度的第二角度定位于支承构件中,步骤(4)将由步骤(3)中一个或多个传感器收集的数据作为第二数据接收,及步骤(5)通过比较第一数据与第二数据判定支承构件是否水平。
19.在实施例中,一个或多个传感器可是6个以上轴惯性测量单元(inertia measurement unit;imu),第一数据及第二数据可分别包括滚转(位准x)及俯仰(位准y)元素,第一数据与第二数据的比较可以是比较第一数据的元素与第二数据的元素,当第一数据的元素及第二数据的元素包括于同一类别中时,可判定支承构件是水平的,而当第一数据的元素及第二数据的元素不包括于同一类别中时,可判定支承构件是倾斜的。
20.在实施例中,一个或多个传感器可以是6个以上轴惯性测量单元(imu),第一数据及第二数据可分别包括滚转(位准x)及俯仰(位准y)元素,第一数据可包括(位准x1,位准y1)元素,第二数据可包括(位准x2,位准y2)元素,一个或多个传感器可产生根据暴露温度而改变的特有误差,由基板式传感器测量的支承构件的倾斜可通过存储可由处理器执行的程序代码的非暂时性计算机可读介质计算为包括(位准xa,位准ya)的元素,且当第一角度为0度且第二角度为180度时,位准xa可为(位准x
1-位准x2)/2,且位准ya可为(位准y
1-位准y2)/2。
21.在实施例中,第一数据可包括(x1,y1,z1)元素,第二数据可包括(x2,y2,z2)元素,第一数据与第二数据的比较可以是比较第一数据的元素与第二数据的元素,当第一数据的元素及第二数据的元素包括于同一类别中时,可判定支承构件是水平的,而当第一数据的元素与第二数据的元素不包括于同一类别中时,可判定支承构件是倾斜的。
22.在实施例中,基板式传感器可以经组态以:提供多个传感器,且一个传感器相对于基座中心设置于与另一传感器相对180度的位置处,第一数据及第二数据分别由前述一个传感器及另一传感器接收,通过比较接收自第一传感器的第一数据与第二数据来判定支承
x2)/2,y为(y1-y2)/2,且z为
32.在实施例中,根据传感器暴露的温度产生的特有误差包括(x3,y3,z3)元素,x可为(x1-x2)/2,y可为(y1-y2)/2,且z可计算为
附图说明
33.上述以及其他目标物及特征将自以下参考下图的描述中变得明显,其中除非另有规定,否则相同的附图标记是指各个附图中的相同部件,且其中:
34.图1是示意性地图示根据本发明概念的实施例的基板处理设备的平面图;
35.图2是示意性地图示图1的液体处理设备的实施例的视图;
36.图3是示意性地图示图1的超临界处理设备的实施例的视图;
37.图4是图示设置于图3的超临界处理设备中的基板支承构件的实施例的透视图;
38.图5是根据本发明概念的实施例的基板式传感器的平面图;
39.图6是根据本发明概念的实施例的图5的基板式传感器的透视图;
40.图7图示例示性视图,其中imu的测量值根据一测量值改变,其中图7(a)的图形是根据第一imu的温度改变的测量值改变的实例,图7(b)的图形是根据第二imu的温度改变的测量值改变的实例;
41.图8图示根据本发明概念的实施例通过使用基板式传感器600来判定支承构件是否可水平支承晶圆的方法,并图示支承构件可水平支承晶圆的情况;
42.图9图示根据本发明概念的实施例通过使用基板式传感器600来判定支承构件是否可水平支承晶圆的方法,并图示支承构件不能水平支承晶圆的实例,且图标当晶圆由支承构件支承时支承构件倾斜θ的情况;
43.图10是根据本发明概念的另一实施例的基板式传感器的平面图;
44.图11是根据图10的实施例的基板式传感器的透视图;
45.图12图示根据图10的实施例通过使用基板式传感器来判定支承构件是否可水平支承晶圆的方法,并图示支承构件可水平支承晶圆的情况;
46.图13图示根据图10的实施例通过使用基板式传感器来判定支承构件是否可水平支承晶圆的方法,并图示支承构件不能水平支承晶圆的实例,且图标当晶圆由支承构件支承时支承构件倾斜θ的情况;
47.图14是用于解释根据本发明概念的实施例的概念的坐标轴;
48.图15是用于解释根据本发明概念的另一实施例的概念的坐标轴;
49.图16是示意性地图示图1的超临界处理设备的另一实施例的视图,且是图示容器打开状态的横截面图;及
50.图17是图示根据图16的实施例的超临界处理设备的容器关闭的状态的横截面图。
51.符号说明
52.10:索引模块
53.12:负载端口
54.14:索引框
55.20:处理模块
56.30:控制器
57.80:容器
58.92:第一方向
59.94:第二方向
60.96:第三方向
61.120:索引机器人
62.122:手部
63.140:导轨
64.152:第二支承突起
65.200:缓冲单元
66.220:缓冲器
67.300:转移设备
68.320:转移机器人
69.322:手部
70.340:导轨
71.400:液体处理设备
72.410:壳体
73.420:杯
74.422:第一回收容器
75.422a:第一入口
76.424:第二回收容器
77.424a:第二入口
78.426:第三回收容器
79.426a:第三入口
80.440:支承单元
81.442:支承板
82.442a:支承销
83.442b:卡盘销
84.444:驱动轴
85.446:驱动器
86.460:液体供应单元
87.461:臂
88.462:第一喷嘴
89.464:第二喷嘴
90.466:第三喷嘴
91.480:提升单元
92.500:超临界处理设备
93.500a:基板处理设备
94.502:处理空间
95.504:缓冲区域
96.520:容器
97.522:上部容器
98.524:下部容器
99.531:第一供应端口
100.532:排气端口
101.533:第二供应端口
102.540:支承构件/第一基板支承部分
103.542:固定杆
104.542a:第一固定杆
105.542b:第二固定杆
106.542c:第三固定杆
107.542d:第四固定杆
108.544:支架
109.544a:第一支架
110.544b:第二支架
111.546a:第一支承销
112.546b:第二支承销
113.546c:第三支承销
114.546d:第四支承销
115.550:排气单元
116.560:流体供应单元
117.562:主供应线
118.564:上部分支线
119.566:下部分支线
120.570:加热器
121.580:挡板
122.582:支承构件
123.583:第二基板支承部分
124.590:驱动构件
125.600:基板式传感器
126.610:基座
127.621:第一传感器
128.622:第二传感器
129.623:第三传感器
130.624:第四传感器
131.630:中心模块
132.1600:基板式传感器
133.w:基板
具体实施方式
134.在下文中,将参考随附附图详细描述本发明概念的例示性实施例,以便本发明概念所属领域的熟练技术人士可容易地实现本发明概念。然而,本发明概念可以以各种不同形式实施,且不限于实施例。此外,在对本发明概念的实施例的描述中,当相关已知功能或组态使得本发明概念的实质不必要地不清楚时,将省略其详细描述。此外,相同的附图标记用于在整个附图中执行类似功能及操作的部件。
135.「包括」一些元素的表达可意谓可进一步包括另一元素而不排除,除非有特别矛盾的描述。具体而言,术语「包括」及「具有」用于标记说明书中描述的特征、数目、步骤、操作、组件、部分、或其组合是存在的,且可理解为可添加一个或多个其他特征、数目、步骤、操作、组件、部分、或其组合。
136.除非另有规定,否则单数形式的术语可包括复数形式。此外,在随附附图中,为了更清楚地描述,可夸大组件的形状及尺寸。
137.术语「及/或」包括所列项目中之任意一者及一个或多个组合。此外,说明书中「连接」的含义不仅指构件a与构件b彼此直接连接的情况,而且亦指构件a与构件b彼此间接连接、而构件c插入构件a与构件b之间的情况。
138.本发明的实施例可以各种形式修改,且本发明概念的范畴不应解释为限于以下实施例。提供本发明概念的实施例是为熟习此项技术者更完整地描述本发明概念。因此,随附附图的组件形状经夸大以强调其更清楚的描述。
139.图1是示意性地图示根据本发明概念的实施例的基板处理系统的平面图。
140.参考图1,基板处理系统包括索引模块10、处理模块20、及控制器(未示于图)。根据实施例,索引模块10及处理模块20沿一个方向设置。下文中,设置索引模块10及处理模块20的方向将称为第一方向92,当自顶部观察时垂直于第一方向92的方向将称为第二方向94,且与第一方向92及第二方向94两者垂直的方向将称为第三方向96。
141.索引模块10将晶圆「w」自容器80(其中接收晶圆「w」)转移至处理模块20,且完全由处理模块20处理的晶圆「w」在容器80中接收。索引模块10的纵向方向为第二方向94。索引模块10包括多个负载端口12及索引框14。负载端口12位于处理模块20相对于索引框14的相对侧上。接收晶圆「w」的容器80定位于负载端口12上。可提供多个负载端口12,且多个负载端口12可沿第二方向94设置。
142.容器80可以是封闭容器,诸如前开式晶圆盒(front open unified pod;foup)。容器80可通过载入单元(未图标)定位于负载端口12上,载入单元诸如高架传送装置、高架输送机、或自动导引车辆、或操作者。
143.在索引框14中设置索引机器人120。可在索引框14中设置纵向方向为第二方向94的导轨140,且索引机器人120可在导轨140上移动。索引机器人120包括手部122,晶圆「w」定位于手部122上,且手部122可前后移动,绕第三方向96旋转,并沿第三方向96移动。可设置多个手部122,使其在向上/向下方向上彼此间隔开,且可独立地向前及向后移动手部122。
144.处理模块20包括缓冲单元200、转移设备300、液体处理设备400、及超临界处理设
备500。缓冲单元200提供空间,其中带入处理模块20中的晶圆「w」及自处理模块20中带出的晶圆「w」暂时停留于其中。液体处理设备400通过将液体供应至晶圆「w」上来执行液体处理晶圆「w」的液体处理工艺。超临界处理设备500执行移除驻留在晶圆「w」上的液体的干燥工艺。转移设备300在缓冲单元200、液体处理设备400、及超临界处理设备500中之任意两者之间转移晶圆「w」。
145.转移设备300设置成使得其纵长方向为第一方向92。缓冲单元200设置于索引模块10与转移设备300之间。液体处理设备400及超临界处理设备500可设置于转移设备300的一侧上。液体处理设备400与转移设备300可沿第二方向94设置。超临界处理设备500与转移设备300可沿第二方向94设置。缓冲单元200可位于转移设备300的一个末端处。
146.根据实例,液体处理设备400可设置于转移设备300的相对侧上,超临界处理设备500可设置于转移设备300的相对侧上,且液体处理设备400可设置于比超临界处理设备500更靠近缓冲单元200的位置处。在转移设备300的一侧上,液体处理设备400可设置于沿第一方向92与第三方向96的「a」乘「b」(「a」及「b」为1或大于1的整数)的数组上。此外,在转移设备300的一侧上,超临界处理设备500可设置于沿第一方向92与第三方向96的「c」乘「d」(「c」及「d」为1或大于1的整数)的数组上。与上述描述不同,仅液体处理设备400可设置于转移设备300的一侧上,且仅超临界处理设备500可设置于其相对侧上。
147.转移设备300具有转移机器人320。纵长方向为第一方向92的导轨340可设置于转移设备300中,且转移机器人320可在导轨340上移动。转移机器人320包括手部322,晶圆「w」定位于手部322上,且手部322可向前及向后移动、绕第三方向96旋转、及沿第三方向96移动。可设置多个手部322,以在向上/向下方向上彼此间隔开,且手部322可独立地向前及向后移动。
148.缓冲单元200包括多个缓冲器220,晶圆「w」定位于其上。缓冲器220设置成沿第三方向96彼此间隔开。缓冲单元200的正面及背面可打开。正面是面向索引模块10的表面,而背面是面向转移设备300的表面。索引机器人120可经由正面接近缓冲单元200,而转移机器人320可经由背面接近缓冲单元200。
149.图2是示意性地图示图1的液体处理设备400的实施例的视图。参考图2,液体处理设备400包括壳体410、杯420、支承单元440、液体供应单元460、及提升单元480。壳体410具有基本矩形的平行六面体形状。杯420、支承单元440、及液体供应单元460设置于壳体410中。
150.杯420具有开放式顶部的处理空间,且晶圆「w」在处理空间中进行液体处理。支承单元440在处理空间中支承晶圆「w」。液体供应单元460将液体供应至由支承单元440支承的晶圆「w」上。可提供多种液体,且可顺序地供应至晶圆「w」上。提升单元480调整杯420与支承单元440之间的相对高度。
151.根据实施例,杯420具有多个回收容器(422、424、及426)。回收容器(422、424、及426)具有用于回收处理基板的液体的回收空间。回收容器(422、424、及426)设置成具有围绕支承单元440的环形形状。当执行液体处理工艺时,由于晶圆「w」的旋转而飞溅的预处理液体经由回收容器(422、424、及426)的入口(422a、424a、及426a)引入回收空间。根据实施例,杯420具有第一回收容器422、第二回收容器424、及第三回收容器426。第一回收容器422设置成围绕支承单元440,第二回收容器424设置成围绕第一回收容器422,且第三回收容器
426设置成围绕第二回收容器424。经由其将液体引入第二回收容器424的第二入口424a可位于经由其将液体引入第一回收容器422的第一入口422a的上侧上,且经由其将液体引入第三回收容器426的第三入口426a可位于第二入口424a的上侧上。
152.支承设备440具有支承板442及驱动轴444。支承板442的上表面可具有基本圆形形状,且可具有大于晶圆「w」直径的直径。支承晶圆「w」的背面的支承销442a设置于支承板442的中心部分处,且支承销442a的上部末端突出于支承板442,使得晶圆「w」与支承板442通过特定距离间隔开。卡盘销442b设置于支承板442的边缘部分处。卡盘销442b向上突出于支承板442,并支承晶圆「w」的一侧,使得当晶圆「w」旋转时晶圆「w」不与支承单元440分离开。驱动轴444由驱动器446驱动,并连接至晶圆「w」的底表面的中心,并围绕其中心轴旋转支承板442。
153.根据一实例,液体供应单元460具有第一喷嘴462、第二喷嘴464、及第三喷嘴466。第一喷嘴462供应第一液体至晶圆「w」。第一液体可为移除驻留在晶圆「w」上的薄膜或异物的液体。第二喷嘴464供应第二液体至晶圆「w」。第二液体可为容易溶解于第三液体中的液体。举例而言,第二液体可为比第一液体更容易溶解于第三液体中的液体。第二液体可为中和供应至晶圆「w」上的第一液体的液体。此外,第二液体可为中和第一液体且比第一液体更容易溶解于第三液体中的液体。根据实施例,第二液体可为水。第三喷嘴466供应第三液体至晶圆「w」。第三液体可为容易溶解于超临界处理设备500中使用的超临界处理流体中的液体。举例而言,第三液体可为比第二液体容易溶解于超临界处理设备500中使用的超临界流体中的液体。根据一实例,第三液体可为有机溶剂。有机溶剂可是异丙醇(isopropyl alcohol;ipa)。根据实施例,超临界流体可为二氧化碳。第一喷嘴462、第二喷嘴464、及第三喷嘴466可由不同的臂461支承,且臂461可独立移动。任选地,第一喷嘴462、第二喷嘴464、及第三喷嘴466可安装于同一臂上来同时移动。
154.提升单元480向上及向下移动杯420。杯420与晶圆「w」之间的相对高度随着杯420向上及向下移动而改变。因此,由于回收预处理液体的回收容器(422、424、及426)根据供应至晶圆「w」的液体的种类而改变,故可分离及回收液体。与上述描述不同,杯420可固定安装,而提升单元480可向上及向下移动支承单元440。
155.图3是示意性地图示了图1的超临界处理设备500的实施例的视图。根据实施例,超临界处理设备500通过使用超临界流体移除晶圆「w」上的液体。超临界处理设备500包括容器520、支承构件540、流体供应单元560及挡板580。
156.容器520提供处理空间502,在其中执行超临界工艺。容器520具有上部容器522(上部主体)及下部容器524(下部主体),且上部容器522与下部容器524组合以提供上述处理空间502。上部容器522设置于下部容器524之上。上部容器522的位置可固定,而下部容器524可由诸如气缸的驱动构件590提升。当下部容器524与上部容器522间隔开时,处理空间502打开,接着,将晶圆「w」带入或带出。在工艺期间,下部容器524附着于上部容器522,且处理空间502密封于外部。超临界处理设备500具有加热器570。根据实施例,加热器570位于容器520的壁之内。在一实施例中,加热器570可提供至构成容器520的上部容器522及下部容器524中任意之一或多者。加热器570加热容器520的处理空间502,使得供应至容器520的处理空间502中的流体保持在超临界状态。由于超临界流体,处理空间502形成一气氛。
157.支承构件540在容器520的处理空间502中支承晶圆「w」。支承构件540包括固定杆
542及支架544。固定杆542可固定安装于上部容器522中,以向下突出于上部容器522的底表面。可设置固定杆542,使得其纵长方向在向上/向下方向上。可设置多个彼此间隔开的固定杆542。固定杆542设置成使得当晶圆「w」带入或带出由固定杆542围绕的空间时,晶圆「w」不会干扰固定杆542。支架544耦接至固定杆542中的各者。支架544自固定杆542的下部末端在平行于地面的方向上延伸。在一实施例中,支架544以可支承晶圆「w」下部末端圆周的形状延伸,以支承待支承的晶圆「w」的下表面。
158.流体供应单元560供应工艺流体至容器520的处理空间502。根据实施例,工艺流体可以以超临界状态供应至处理空间502。与此不同,工艺流体可以以气态供应至处理空间502,且可在处理空间502中相变为超临界状态。根据实施例,流体供应单元560具有主供应线562、上部分支线564、及下部分支线566。上部分支线564及下部分支线566自主供应线562分支开。上部分支线564耦接至上部容器522,以在定位于支承构件540上的晶圆「w」上方供应清洗液。根据一实例,上部分支线564耦接至上部容器522的中心。下部分支线566耦接至下部容器524,以供应定位于支承构件540上的晶圆「w」下方的清洗液。根据实例,下部分支线566耦接至下部容器524的中心。排气单元550耦接至下部容器524。容器520的处理空间502中的超临界流体经由排气单元550排放至容器520的外部。
159.挡板580可设置于容器520的处理空间502中。挡板580可具有圆盘形状。挡板580由支承构件582支承,以与容器520的底表面向上间隔开。支承构件582具有杆状形状,且多个支承构件582设置成通过特定距离彼此间隔开。当自顶部观察时,挡板580可设置为与下部分支线566的出口及排气单元550的入口重叠。挡板580可防止经由下部分支线566供应的清洗液直接朝向晶圆「w」排放从而损坏晶圆「w」。
160.图4是图示设置于图3的超临界处理设备中的支承构件540的实施例的透视图。参考图4,将更详细地描述根据实施例的支承构件540。
161.支承构件540包括固定杆542及支架544。固定杆542可固定安装于上部容器522中,以向下突出于上部容器522的底表面。可设置固定杆542,使得其纵长方向为向上/向下方向。根据实施例,多个固定杆542可彼此间隔设置。在一实施例中,固定杆542包括第一固定杆542a、第二固定杆542b、第三固定杆542c、及第四固定杆542d。多个支架544可彼此间隔设置。在一实施例中,支架544包括第一支架544a及第二支架544b。第一固定杆542a及第二固定杆542b耦接至第一支架544a。第三固定杆542c及第四固定杆542d耦接至第二支架544b。第一固定杆542a及第二固定杆542b彼此相邻,且第三固定杆542c及第四固定杆542d彼此相邻。第一固定杆542a与第三固定杆542c之间的距离很大,使得晶圆「w」可在两者之间通过。
162.第一支架544a可具有具有特定中心角的圆弧形状。第一支承销546a及第二支承销546b设置于第一支架544a的上表面上,以彼此间隔开。第一支承销546a及第二支承销546b通过特定高度突出于第一支架544a的上表面。随着第一支承销546a与第二支承销546b之间的间隔距离变大,晶圆「w」可稳定地支承,但可根据设计做出不同的设定。
163.第二支架544b可具有具有特定中心角的圆弧形状。第三支承销546c及第四支承销546d设置于第二支架544b的上表面上,以彼此间隔开。第三支承销546c及第四支承销546d通过特定高度突出于第二支架544b的上表面。随着第三支承销546c与第四支承销546d之间的间隔距离变大,晶圆「w」可稳定地支承,但可根据设计做出不同的设定。
164.第一支承销546a、第二支承销546b、第三支承销546c、及第四支承销546d通过特定
间隔将晶圆「w」与由支架544界定的平面间隔开。支承销546通过减小晶圆「w」与支架544的接触面积来减轻晶圆「w」由于晶圆「w」与支架544的接触所受到的污染。根据实施例,尽管支承销546为第一支承销546a、第二支承销546b、第三支承销546c、及第四支承销546d总共四个支承销,但只要支承销546可通过特定距离与由支架544界定的平面间隔开,则可提供与本说明书不同数目的支承销546。支承销546必须在高温及高压环境下保持不变形。在一实施例中,支承销546可由与支架544相同的材料形成。
165.由于上述结构,带入容器520的处理空间502中的晶圆「w」的周边区域定位于支架544的支承销546上,且晶圆「w」的整个上表面区域、晶圆「w」的下表面的中心区域、及晶圆「w」的底表面的周边区域的一部分暴露于供应至处理空间502中的工艺流体。
166.支承晶圆「w」的支承销546的末端高度必须一致。支承销546的高度可根据支架544的水平度以及固定杆542与上部容器522的耦接程度而改变。此外,由于在打开容器520的工艺中下部容器524的提升,支承销546的最上端的高度可变得不同。由于除上述原因以外的各种原因,支承销546的最上端的高度可变得不同。然而,仅当支承销546的最上端的高度设定为相同时,由支承销546的上部末端支承的晶圆「w」才可保持水平。可经由水滴计判定支承销546最上端的高度是否相同,但误差范围严重,且在该工艺中无法识别支承销546最上端的高度是否相同。
167.图5是根据本发明概念的实施例的基板式传感器600的平面图。图6是根据本发明概念的实施例的图5的基板式传感器的透视图。参考图5及图6,将描述根据实施例的基板式传感器600。当使用根据本发明概念的实施例的基板式传感器600时,可判定晶圆「w」是否可由支承构件540水平支承。举例而言,基板式传感器600以不超过0.1度的单位测量支承销546最上端的高度差,并可识别在该工艺中支承销546最上端的高度是否相同。
168.基板式传感器600包括基座610。基座610设置成具有与基板的尺寸基本相同或相似的实体尺寸。基本相同或类似是指程度大到使得一般技术人士认为,当基板式传感器600与基板的环境相同时,即使基板式传感器600的尺寸与经处理基板的尺寸不完全相同,由基板式传感器600形成的条件亦为基板经处理时的条件。
169.基板式传感器600包括一个或多个传感器。传感器包括3个以上轴加速度传感器或6个以上惯性测量单元。
170.加速度传感器是已知技术,且是可参照地球重力加速度测量施加于对象上的力的传感器。加速度传感器通过将重力加速度分解为x、y、及z轴的分量来显示轴的大小。加速度传感器可通过x、y、及z值的向量和来表示重力加速度。由于即使在停止状态下加速度传感器的值亦具有特定值,故可识别倾斜度。在通过使用加速度传感器测量倾斜时,x轴的倾斜可由arctan(x/z)表达且y轴的倾斜可由arctan(y/z)表达。
171.6个以上轴imu(以下称为「imu」)是已知技术,且除3轴加速度传感器以外,亦包括3轴陀螺传感器。三轴陀螺传感器测量角速度。如图14所示,6个以上轴imu计算滚转(以下称为位准y)、俯仰(以下称为位准x)、及偏航。在已知imu中,可应用三轴地磁传感器来校正陀螺传感器的最终值漂移的现象。
172.诸如imu的传感器的测量值在敏感地反应温度改变时发生改变,从而造成误差。作为实例,imu的测量值亦随着温度的升高而增大。举例而言,imu的测量值亦随着温度的降低而减小。图7图示了例示性视图,其中imu的测量值根据温度而改变,其中图7(a)的图形是根
据第一imu的温度改变而测量值改变的实例,而图7(b)的图形是根据第二imu的温度改变而测量值改变的实例。参考图7(a)的图形及图7(b)的图形,与第二imu相比,第一imu的温度测量的改变率高。根据本发明概念的一实施例,尽管根据温度上升存在测量误差,但可判定晶圆「w」是否可由支承构件540水平支承。
173.提供至基板式传感器600的传感器包括第一传感器621。此外,可进一步包括第二传感器622。第一传感器621及第二传感器622为6个以上轴imu。第一传感器621及第二传感器622可位于相对于基板式传感器600的中心「c」的彼此相对的位置处。第一传感器621及第二传感器622可位于基板式传感器600的边缘处。在实施例中,第一传感器621及第二传感器622可设置成位于支承销546的上部部分处。详言之,第一传感器621可位于第一支承销546a的上部部分处,而第二传感器622可位于第四支承销546d的上部部分处。由第一传感器621及第二传感器622相对于基板式传感器600的中心「c」界定的角度可为180度。
174.基板式传感器600包括中心模块630。中心模块630可包括自第一传感器621及/或第二传感器622接收数据的通讯装置、存储数据的存储装置、发送数据的发射器、及提供电力至组态的电源。第一传感器621及中心模块630可彼此连接,使得由第一传感器621获取的数据可由中心模块630接收。第二传感器622及中心模块630可彼此连接,使得由第二传感器622获取的数据可由中心模块630接收。发射器可由无线通信模块提供。经由由发射器发送的数据,可由提供至外部的装置进行以下描述的计算。此外,提供计算器至中心模块630,将在以下描述的计算由计算器进行,且由支承构件540产生的倾斜可通过发射器发送至外部设备。
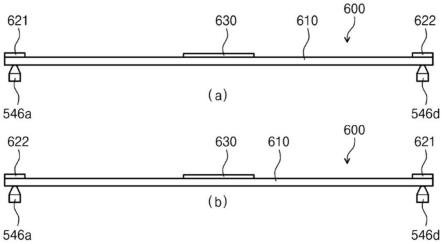
175.图8图示根据本发明概念的一实施例通过使用基板式传感器600来判定支承构件540是否可水平支承晶圆的方法,并图示支承构件可水平支承晶圆的情况。图9图示根据本发明概念的实施例通过使用基板式传感器600来判定支承构件是否可水平支承晶圆的方法,并图示支承构件不能水平支承晶圆的实例,且图示当晶圆由支承构件支承时支承构件倾斜θ的情况。参考图8及图9,将描述通过使用基板式传感器600来测量支承构件的水平度的方法。
176.根据实施例,基板式传感器600包括在以第一角度提供基板式传感器600的状态下测量支承构件540倾斜的第一操作,以及在以第二角度提供基板式传感器600的状态下测量支承构件540倾斜的第二操作。第二角度是基板式传感器600自第一角度旋转180度的状态。图8(a)及图9(a)图示根据第一操作的倾斜测量状态,且图8(b)及图9(b)图示根据第二操作的倾斜测量状态。基板式传感器600可经由设置于超临界处理设备500外部的对准器自第一角度旋转至第二角度。举例而言,包括对准缓冲单元200中基板的对准器的基板式传感器600可旋转。旋转的基板式传感器600可由转移机器人320载入,并可位于支承构件540中。
177.在根据第一操作以第一角度提供基板式传感器600的状态下,第一传感器621可位于第一支承销546a上方,且第二传感器622可位于第四支承销546d上方。在根据第二操作以第二角度提供基板式传感器600的状态下,第一传感器621可位于第四支承销546d上方,且第二传感器622可位于第一支承销546a上方。第一传感器621及第二传感器622的位置是简单的实例,且本发明概念不限于上述位置。同时,发明者(多个)认识到,当传感器位于支承销546上方时,可最准确地导出支承构件540的水平状态。然而,由于根据设计,多个支承销546可设置于不同于本发明概念实施例的位置处,故根据第一角度的传感器的位置可在考
虑一般技术常识的情况下适当修改。
178.第一传感器621及第二传感器622的测量值可根据温度改变。如上所述,这是imu的基本特征。根据本发明概念的实施例,尽管测量值根据温度改变,但可通过在基板式传感器600以第一角度提供的状态下测量倾斜及在基板式传感器600以第二角度提供的状态下测量倾斜来判定水平状态。
179.举例而言,假设第一温度(高于室温的温度,举例而言,约70℃的温度)的气氛。假设第一传感器621在约70℃的温度气氛中在(位准x,位准y)的坐标下产生(0.64
°
,0.42
°
)的特有误差。此外,假设第二传感器622在约70℃的温度气氛中在(位准x,位准y)的坐标下产生(0.61
°
,0.43
°
)的特有误差。
180.如图8中所示当零校准imu的值在水平状态下为(0.00
°
,0.00
°
),支承构件可水平支承晶圆时,第一传感器621的测量值v1在根据第一操作以第一角度提供基板式传感器600的状态下测量为(0.64
°
,0.42
°
),且第二传感器622的测量值v1为(0.61
°
,0.43
°
)。此外,在根据第二操作以第二角度提供基板式传感器600的状态下测量的第一传感器621的测量值v2为(0.64
°
,0.42
°
),且第二传感器622的测量值v2为(0.61
°
,0.43
°
)。当晶圆设置成水平支承时基本测量的值仅为传感器的特有误差,因此当v1-v2为(0.00
°
,0.00
°
)时判定水平状态。然而,在本发明概念的实施例中表达的是(0.00
°
,0.00
°
)的数学值,但水平状态是在基本认为是(0.00
°
,0.00
°
)的状态下判定的。举例而言,当(
±
0.05
°
,
±
0.05
°
)的范围评估为水平状态时,则即使该值在数学上并非(0.00
°
,0.00
°
),亦会判定水平状态。
181.比较结果如表1中所示。
182.[表1]第一温度气氛中图8状态下的测量值
[0183][0184]
图9图示了当晶圆支承于支承构件540上时基板式传感器600倾斜θ的情况。假设第一传感器621在约70℃的第一温度气氛中在(x级,y级)坐标下产生特有误差(0.64
°
,0.42
°
)。此外,假设第二传感器622在约70℃的气氛温度中在(x级,y级)坐标下产生特有误差(0.61
°
,0.43
°
)。
[0185]
假设当基板式传感器600在基板式传感器600以第一角度提供的状态下倾斜θ时向量坐标为(0.07
°‑
0.05
°
)。在根据第一操作以第一角度提供基板式传感器600的状态下测量的第一传感器621的测量值v1为(0.71
°
,0.37
°
),且第二传感器622的测量值v1为(0.68
°
,0.38
°
)。此外,在根据第二操作以第二角度提供基板式传感器600的状态下测量的第一传感器621的测量值v2为(0.54
°
,0.48
°
),且第二传感器622的测量值v2为(0.57
°
,0.47
°
)。当晶圆设置成水平支承时,存在基本测量值,且,通过在向量和中添加传感器的特有误差来测量测量值。因此,当第一传感器621中v1-v2非(0.00
°
,0.00
°
)时,判定该状态非水平状态。
[0186]
比较结果如表2中所示。
[0187]
[表2]第一温度气氛中图9状态下的测量值
[0188][0189]
第一操作中处于第一角度的第一传感器621的位置成为处于第二角度的第二传感器622的位置,基板式传感器600在第二操作中旋转180
°
。第一操作中处于第一角度的第二传感器622的位置成为处于第二角度的第一传感器621的位置,基板式传感器600在第二操作中旋转180
°
。
[0190]
此外,随着传感器的方向变为相反,处于第二角度的第一传感器621及第二传感器622的测量值测量为(-0.07
°
,0.05
°
)的倾角,这构成测量值中的一些。亦即,因为v1为(位准x的特有误差,位准y的特有误差)+(0.07
°
,-0.05
°
)且v2为(位准x的特有误差,位准y的特有误差)+(-0.07
°
,+0.05
°
),故倾角θ可通过(v1-v2)/2的公式获得。根据实施例,θ=(v1-v2)/2=(0.07
°
,-0.05
°
)。
[0191]
在另一示例中,可参考测量位置来测量倾角。
[0192]
[表3]根据另一示例计算图9状态下第一温度气氛中的测量值及倾斜值
[0193][0194]
根据本发明概念的另一示例,可经由计算倾角。图5至图9中描述的基板式传感器600可仅用第一传感器621获得相同的结果,但可通过提供第二传感器622来验证有效性。此外,可经由通过使用第一传感器621及第二传感器622导出的倾斜值之平均来计算更高精度的倾斜。
[0195]
图10是根据本发明概念的另一实施例的基板式传感器1600的平面图。图11是根据图10的实施例的基板式传感器1600的透视图。参考图10及图11,将描述根据另一实施例的基板式传感器1600。当使用基板式传感器1600时,可判定晶圆「w」是否可由支承构件540水
平支承。举例而言,基板式传感器1600以不超过0.1度的单位测量支承销546最上端的高度差,且可识别在该工艺期间支承销546最上端的高度是否相同。
[0196]
基板式传感器1600包括一个或多个传感器。传感器可是imu。提供至基板式传感器600的传感器包括第一传感器621及第二传感器622。此外,可进一步包括第三传感器623及第四传感器624。第一传感器621、第二传感器622、第三传感器623、及第四传感器624为imu。
[0197]
第一传感器621及第二传感器622可位于相对于基板式传感器600的中心「c」的彼此相对的位置处。第一传感器621及第二传感器622可位于基板式传感器600的边缘处。在一实施例中,第一传感器621及第二传感器622可设置成位于支承销546的上部部分处。详言之,第一传感器621可位于第一支承销546a的上部部分处,且第二传感器622可位于第四支承销546d的上部部分处。由第一传感器621及第二传感器622相对于基板式传感器600的中心「c」界定的角度可为180度。
[0198]
第三传感器623及第四传感器624可位于相对于基板式传感器600的中心「c」的彼此相对的位置处。第三传感器623及第四传感器624可位于基板式传感器600的边缘处。在一实施例中,第三传感器623及第四传感器624可设置成位于支承销546的上部部分处。详言之,第三传感器623可位于第二支承销546b的上部部分处,且第四传感器624可位于第三支承销546c的上部部分处。由第三传感器623及第四传感器624相对于基板式传感器600的中心「c」界定的角度可为180度。
[0199]
基板式传感器1600包括中心模块630。中心模块630可包括自第一传感器621、第二传感器622、第三传感器623、及/或第四传感器624接收数据的通讯装置、存储数据的存储装置、发送数据的发射器、及提供电力至组态的电源。第一传感器621与中心模块630可彼此连接,使得由第一传感器621获取的数据可由中心模块630接收。第二传感器622与中心模块630可彼此连接,使得由第二传感器622获取的数据可由中心模块630接收。第三传感器623与中心模块630可彼此连接,使得由第三传感器623获取的数据可由中心模块630接收。第四传感器624与中心模块630可彼此连接,使得由第四传感器624获取的数据可由中心模块630接收。发射器可由无线通信模块提供。经由由发射器发送的数据,可通过提供至外部的装置进行以下描述的计算。此外,提供计算器至中心模块630,且以下将描述的计算由计算器进行,由此,由支承构件540产生的倾斜可经由发射器转移至外部装置。
[0200]
图12图示通过使用根据图10的实施例的基板式传感器1600来判定支承构件是否可水平支承晶圆的方法,并图示支承构件可水平支承晶圆的情况。图13图示通过使用根据图10的实施例的基板式传感器1600来判定支承构件是否可水平支承晶圆的方法,并图示支承构件不能水平支承晶圆的实例,且图示当晶圆由支承构件支承时支承构件倾斜θ的情况。参考图12及图13,将描述通过使用基板式传感器1600测量支承构件540的水平度的方法。
[0201]
根据实施例,基板式传感器1600包括在基板式传感器1600以第一角度提供的状态下测量支承构件540倾斜的第一操作,及在基板式传感器1600以第二角度提供的状态下测量支承构件540倾斜的第二操作。第二角度是基板式传感器1600自第一角度旋转180度的状态。图12(a)及图13(a)图示根据第一操作的倾斜测量状态,且图12(b)及图13(b)图示根据第二操作的倾斜测量状态。基板式传感器1600可经由设置于超临界处理设备500外部的对准器自第一角度旋转至第二角度。举例而言,包括对准缓冲单元200中基板的对准器的基板式传感器1600可旋转。旋转的基板式传感器1600可由转移机器人320载入,并可位于支承构
件540中。
[0202]
在根据第一操作以第一角度提供基板式传感器1600的状态下,第一传感器621可位于第一支承销546a之上,且第二传感器622可位于第四支承销546d之上。此外,第三传感器623可位于第二支承销546b的上部部分处,且第四传感器624可位于第三支承销546c的上部部分处。
[0203]
在根据第二操作以第二角度提供基板式传感器1600的状态下,第一传感器621可位于第四支承销546d之上,且第二传感器622可位于第一支承销546a之上。此外,第三传感器623可位于第三支承销546c的上部部分处,且第四传感器624可位于第二支承销546b的上部部分处。
[0204]
第一传感器621、第二传感器622、第三传感器623、及第四传感器624的位置是简单的实例,且本发明的概念不限于上述位置。同时,发明者(多个)认识到,当传感器位于支承销546之上时,可最准确地导出支承构件540的水平状态。然而,由于根据设计,多个支承销546可设置于不同于本发明概念实施例的位置处,故根据第一角度的传感器的位置可在考虑一般技术常识的情况下适当修改。
[0205]
第一传感器621、第二传感器622、第三传感器623、及第四传感器624的测量值可根据温度改变。如上所述,这是imu的基本特征。根据本发明概念的一实施例,尽管测量值根据温度发生改变,但可通过在基板式传感器1600以第一角度提供的状态下测量倾斜并在基板式传感器600以第二角度提供的状态下测量倾斜来判定水平状态。
[0206]
作为实例,假设第一温度(高于室温的温度,举例而言,约70℃的温度)的气氛。假设第一传感器621在约70℃的温度气氛中在(x级,y级)的坐标下产生(0.64
°
,0.42
°
)的特有误差。此外,假设第二传感器622在约70℃的温度气氛中在(x级,y级)的坐标下产生(0.61
°
,0.43
°
)的特有误差。
[0207]
假设第三传感器623在约70℃的温度气氛中在(x级,y级)的坐标下产生(0.62
°
,0.43
°
)的特有误差。此外,假设第四传感器624在约70℃的温度气氛中在(x级,y级)的坐标下产生(0.65
°
,0.42
°
)的特有误差。
[0208]
如图12中所示当imu的值在水平状态下为(0.00
°
,0.00
°
),支承构件可水平支承晶圆时,在根据第一操作以第一角度提供基板式传感器600的状态下测量的第一传感器621的测量值v1为(0.64
°
,0.42
°
),第二传感器622的测量值v1为(0.61
°
,0.43
°
),第三传感器623的测量值v1为(0.62
°
,0.43
°
),且第四传感器624的测量值v1为(0.65
°
,0.42
°
)。此外,在根据第二操作以第二角度提供基板式传感器600的状态下测量的第一传感器621的测量值v2为(0.64
°
,0.42
°
),第二传感器622的测量值v2为(0.61
°
,0.43
°
),第三传感器623的测量值v2为(0.62
°
,0.43
°
),且第四传感器624的测量值v2为(0.65
°
,0.42
°
)。当晶圆设置成水平支承时基本测量值仅为传感器的特有误差,因此当v1-v2为(0.00
°
,0.00
°
)时判定水平状态。然而,在本发明概念的实施例中表达的是(0.00
°
,0.00
°
)的数学值,但水平状态是在基本认为是(0.00
°
,0.00
°
)的状态下判定的。举例而言,当(
±
0.05
°
,
±
0.05
°
)的范围评估为水平时,则即使该值数学上非(0.00
°
,0.00
°
),亦会判定水平状态。
[0209]
比较结果如表4中所示。
[0210]
[表4]第一温度气氛中图12状态下的测量值
[0211][0212]
图13图示当晶圆支承于支承构件540上时支承构件540倾斜θ的情况。假设第一传感器621在约70℃的温度气氛中在(x级,y级)的坐标下产生(0.64
°
,0.42
°
)的特有误差。假设第二传感器622在约70℃的第一温度气氛中在(x级,y级)的坐标下产生特有误差(0.61
°
,0.43
°
)。假设第三传感器623在约70℃的温度气氛中在(x级,y级)的坐标下产生(0.62
°
,0.43
°
)的特有误差。此外,假设第四传感器624在约70℃的温度气氛中在(x级,y级)的坐标下产生(0.65
°
,0.42
°
)的特有误差。
[0213]
假设当基板式传感器1600在基板式传感器600以第一角度提供的状态下倾斜θ时向量坐标为(0.07
°
,-0.05
°
)。在根据第一操作以第一角度提供基板式传感器600的状态下测量的第一传感器621的测量值v1为(0.71
°
,0.37
°
),第二传感器622的测量值v1为(0.68
°
,0.38
°
),第三传感器623的测量值v1为(0.69
°
,0.38
°
),且第四传感器624的测量值v1为(0.72
°
,0.37
°
)。此外,在根据第二操作以第二角度提供基板式传感器600的状态下测量的第一传感器621的测量值v2为(0.57
°
,0.47
°
),且第二传感器622的测量值v2为(0.54
°
,0.48
°
)。第三传感器623为(0.55
°
,0.48
°
),且第四传感器624为(0.58
°
,0.47
°
)。当晶圆设置成水平支承时,存在基本测量值,且,通过在向量和中添加传感器的特有误差来测量测量值。因此,当v1-v2在第一传感器621、第二传感器622、第三传感器623、及/或第四传感器624中非(0.00
°
,0.00
°
)时,判定该状态非水平状态。
[0214]
比较结果如表5中所示。
[0215]
[表5]第一温度气氛中图13状态下的测量值
[0216][0217]
第一操作中处于第一角度的第一传感器621的位置成为处于第二角度的第二传感器622的位置,基板式传感器600在第二操作中旋转180
°
。第一操作中处于第一角度的第二传感器622的位置成为处于第二角度的第一传感器621的位置,基板式传感器600在第二操作中旋转180
°
。第一操作中处于第一角度的第三传感器623的位置成为处于第二角度的第四传感器624的位置,基板式传感器600在第二操作中旋转180
°
。第一操作中处于第一角度的第四传感器624的位置成为处于第二角度的第三传感器623的位置,基板式传感器600在第二操作中旋转180
°
。此外,随着传感器的方向变为相反,处于第二角度的第一传感器621及第二传感器622的测量值测量为(-0.07,0.05)的倾角θ,其构成测量值中的一些。亦即,因为v1为(位准x的特有误差,位准y的特有误差)+(0.07
°
,-0.05
°
),且v2为(位准x的特有误差,位准y的特有误差)+(-0.07
°
,+0.05
°
),倾角θ可自(v1-v2)/2的公式获得。根据实施例,θ=(v1-v2)/2=(0.07
°
,-0.05
°
)。
[0218]
在另一示例中,可参考测量位置测量倾角。
[0219]
[表6]根据另一示例计算图9状态下第一温度气氛中的测量值及倾斜值
[0220][0221]
根据本发明概念的另一示例,可经由及及计算倾角。此外,可经由通过使用第一传感器621、第二传感器622、第三传感器623、及第四传感器624导出的倾斜值的平均来计算更高精度的倾斜。在下文中,将描述根据另一实施例的用于计算倾斜值的方法。
[0222]
根据另一实施例,提供至基板式传感器600的传感器为三轴加速度传感器。再次参考图8至图12,将描述根据本发明概念的另一实施例的用于计算倾角的方法。
[0223]
图8图示根据本发明概念的实施例的通过使用基板式传感器600来判定支承构件540是否可水平支承晶圆的方法,并图示支承构件可水平支承晶圆的情况。图9图示根据本发明概念的实施例的通过使用基板式传感器600来判定支承构件是否可水平支承晶圆的方法,并图示支承构件不能水平支承晶圆的实例,且图示当晶圆由支承构件支承时支承构件倾斜θ的情况。参考图8及图9,将描述通过使用基板式传感器600来测量支承构件的水平度的方法。
[0224]
根据实施例,基板式传感器600包括在基板式传感器600以第一角度提供的状态下测量支承构件540的倾斜的第一操作,及在基板式传感器600以第二角度提供的状态下测量支承构件540的倾斜的第二操作。第二角度是基板式传感器600自第一角度旋转180度的状
态。图8(a)及图9(a)图示根据第一操作的倾斜测量状态,且图8(b)及图9(b)图示根据第二操作的倾斜测量状态。基板式传感器600可经由设置于超临界处理设备500外部的对准器自第一角度旋转至第二角度。举例而言,可使用在缓冲单元200中对准基板的对准器来旋转基板式传感器600。旋转的基板式传感器600可由转移机器人320载入,并可位于支承构件540中。
[0225]
在根据第一操作以第一角度提供基板式传感器600的状态下,第一传感器621可位于第一支承销546a之上,且第二传感器622可位于第四支承销546d之上。在根据第二操作以第二角度提供基板式传感器600的状态下,第一传感器621可位于第四支承销546d之上,且第二传感器622可位于第一支承销546a之上。第一传感器621及第二传感器622的位置是简单的实例,且本发明概念不限于上述位置。同时,发明者(多个)认识到,当传感器位于支承销546之上时,可最准确地导出支承构件540的水平状态。然而,由于根据设计,多个支承销546可设置于不同于本发明概念实施例的位置处,故根据第一角度的传感器的位置可在考虑一般常识的情况下适当修改。
[0226]
第一传感器621及第二传感器622的测量值可根据温度改变。如上所述,这是加速度传感器的基本特征。根据本发明概念的实施例,尽管测量值根据温度改变,但可通过在基板式传感器600以第一角度提供的状态下测量倾斜及在基板式传感器600以第二角度提供的状态下测量倾斜来判定水平状态。
[0227]
作为实例,假设第一温度(高于室温的温度,举例而言,约70℃的温度)的气氛。假设第一传感器621在约70℃的温度气氛中在(x,y,z)的向量坐标下产生(1,1,-1)的特有误差。此外,假设第二传感器622在约70℃的温度气氛中在(x,y,z)的坐标下产生特有误差(0.8,0.7,-1.1)。
[0228]
如图8中所示当加速度传感器的值在水平状态下为(0,0,-9.8),支承构件可水平支承晶圆时,在根据第一操作以第一角度提供基板式传感器600的状态下测量的第一传感器621的测量值v1为(1,1,-10.8),且第二传感器622的测量值v1为(0.8,0.7,-10.9)。此外,在根据第二操作以第二角度提供基板式传感器600的状态下测量的第一传感器621的测量值v2为(1,1,-10.8),且第二传感器622的测量值v2为(0.8,0.7,-10.9)。当晶圆设置成水平支承时,基本测量值仅是对应于传感器的z值及特有误差的值,因此当v1-v2为(0,0,0)时判定水平状态。然而,本发明概念的实施例中表达的是(0,0,0)的数学值,但水平状态是在可基本认为是(0,0,0)的状态下判定的。举例而言,当(
±
0.05,
±
0.05,
±
0.05)的范围评估为水平时,则即使该值在数学上非(0,0,0),亦会判定水平状态。
[0229]
比较结果如表7中所示。
[0230]
[表7]第一温度气氛中图8状态下的测量值
[0231]
[0232]
图9图示当晶圆支承于支承构件540上时支承构件540倾斜θ的情况。假设第一传感器621在约70℃的温度气氛中在(x,y,z)的向量坐标下产生(1,1,-1)的特有误差。此外,假设第二传感器622在约70℃的温度气氛中在(x,y,z)的坐标下产生特有误差(0.8,0.7,-1.1)。
[0233]
假设在基板式传感器600以第一角度提供的状态下,当基板式传感器600倾斜θ时,向量坐标为(2,0.5,-9.56)。第一传感器621的测量值v1在根据第一操作以第一角度提供基板式传感器600的状态下测量为(3,1.5,-10.3),且第二传感器622的测量值v1为(2.8,1.2,-10.4)。此外,在根据第二操作以第二角度提供基板式传感器600的状态下测量的第一传感器621的测量值v2为(-1,0.5,-10.3),且第二传感器622的测量值v2为(-1.2,0.2,-10.4)。当晶圆设置成水平支承时,基本测量值是存在的,且,通过在向量和中添加传感器的特有误差来测量测量值。因此,当第一传感器621中v1-v2非(0.00
°
,0.00
°
)且第二传感器622中v1-v2为(2.8,1,0)时,判定该状态非水平状态。
[0234]
比较结果如表8中所示。
[0235]
[表8]第一温度气氛中图9状态下的测量值
[0236][0237]
当基板式传感器600在基板式传感器600以第一角度提供的状态下倾斜θ时向量坐目标x值及y值可经由(v1-v2)/2知道。(v1-v2)/2为(x,y,0)。因此,当判定支承构件不处于水平状态时,可经由公式判定倾角。在本实施例中,(v1-v2)/2=(x,y,0)=(2,0.5,0)。在此,当考虑加速度传感器中使用的加速度的「g」值为地球的重力加速度时,平面的倾斜θ的「z」值可作为g*sin(a)的值获得,因为当通过使用极坐标计算「z」值时,「x」值及「y」值是通过图15参考的已知值。在另一方法中,「z」值可通过使用勾股定理经由获得。「z」值是在考虑重力方向的情况下获得的。在基板式传感器600以第一角度提供的状态下,当基板式传感器600倾斜θ时的向量坐标可通过使用加速度传感器作为获得。
[0238]
此外,(x值的特有误差,y值的特有误差,v1(或v2)的z值)可经由(v1+v2)/2驱动。举例而言,在本实例中,在第一传感器621的情况下,(v1+v2)/2为(1,1,-10.3),且在第二传感器622的情况下,(v1+v2)/2为(0.8,0.7,-10.4)。此外,可经由差值v1(z)或v2(z)及的倾斜值的「z」值来计算z值的特有误差。
[0239]
图5至图9中所述的基板式传感器600可仅用第一传感器621获得相同的结果,但可
通过提供第二传感器622来验证有效性。
[0240]
随后,将参考图12及图13描述根据另一实施例的方法,该方法用于根据经由图10引用的本发明概念的另一实施例的基板式传感器1600测量倾斜值。基板式传感器1600包括一个或多个传感器。传感器为3个以上轴加速度传感器。
[0241]
根据实施例,基板式传感器1600包括在基板式传感器600以第一角度提供的状态下测量支承构件540的倾斜的第一操作,及在基板式传感器600以第二角度提供的状态下测量支承构件540的倾斜的第二操作。第二角度是基板式传感器600自第一角度旋转180度的状态。图12(a)及图13(b)图示根据第一操作的倾斜测量状态,且图12(b)及图13(b)图示根据第二操作的倾斜测量状态。基板式传感器1600可通过设置于超临界处理设备500外部的对准器自第一角度旋转至第二角度。举例而言,可使用在缓冲单元200中对准基板的对准器来旋转基板式传感器1600。旋转的基板式传感器1600可由转移机器人320载入,并可位于支承构件540中。
[0242]
在根据第一操作以第一角度提供基板式传感器1600的状态下,第一传感器621可位于第一支承销546a上方,且第二传感器622可位于第四支承销546d上方。此外,第三传感器623可位于第二支承销546b的上部部分处,且第四传感器624可位于第三支承销546c的上部部分处。
[0243]
在根据第二操作以第二角度提供基板式传感器600的状态下,第一传感器621可位于第四支承销546d上方,且第二传感器622可位于第一支承销546a上方。此外,第三传感器623可位于第三支承销546c的上部部分处,且第四传感器624可位于第二支承销546b的上部部分处。
[0244]
第一传感器621、第二传感器622、第三传感器623、及第四传感器624的位置是简单实例,本发明概念不限于上述位置。同时,发明者(多个)认识到,当传感器位于支承销546上方时,可最准确地导出支承构件540的水平状态。然而,由于根据设计,多个支承销546可设置于不同于本发明概念实施例的位置处,故根据第一角度的传感器的位置可在考虑一般技术常识的情况下适当修改。
[0245]
第一传感器621、第二传感器622、第三传感器623、及第四传感器624的测量值可根据温度改变。如上所述,这是加速度传感器的基本特征。根据本发明概念的实施例,尽管测量值根据温度改变,但可通过在基板式传感器1600以第一角度提供的状态下测量倾斜及在基板式传感器600以第二角度提供的状态下测量倾斜来判定水平状态。
[0246]
作为实例,假设第一温度(高于室温的温度,举例而言,约70℃的温度)的气氛。假设第一传感器621在约70℃的温度气氛中在(x,y,z)的向量坐标下产生(1,1,-1)的特有误差。假设第二传感器622在约70℃的温度气氛中在(x,y,z)的坐标下产生(0.8,0.7,-1.1)的特有误差。假设第三传感器623在约70℃的温度气氛中在(x,y,z)的坐标下产生(0.6,0.7,-1)的特有误差。此外,假设第四传感器624在约70℃的温度气氛中在(x,y,z)的坐标下产生(0.5,0.8,-1.2)的特有误差。
[0247]
如图12中所示当加速度传感器的值在水平状态下为(0,0,-9.8),支承构件可水平支承晶圆时,在根据第一操作以第一角度提供基板式传感器600的状态下测量的第一传感器621的测量值v1为(1,1,-10.8),第二传感器622的测量值v1为(0.8,0.7,-10.9),第三传感器623的测量值v1为(0.6,0.7,-10.8),且第四传感器624的测量值v1为(0.5,0.8,-11)。
此外,在根据第二操作以第二角度提供基板式传感器600的状态下测量的第一传感器621的测量值v2为(1,1,-10.8),第二传感器622的测量值v2为(0.8,0.7,-10.9),第三传感器623的测量值v2为(0.6,0.7,-10.8),且第四传感器624的测量值v2为(0.5,0.8,-11)。当晶圆设置成水平支承时,基本测量值仅是对应于传感器的z值及特有误差的值,因此当v1-v2为(0,0,0)时判定水平状态。然而,本发明概念的实施例中表达的是(0,0,0)的数学值,但水平状态是在可基本认为是(0,0,0)的状态下判定的。举例而言,当(
±
0.05,
±
0.05,
±
0.05)的范围评估为水平时,即使该值在数学上非(0,0,0),亦会判定水平状态。
[0248]
比较结果如表9中所示。
[0249]
[表9]第一温度气氛中图12状态下的测量值
[0250][0251]
图13图示当晶圆支承于支承构件540上时支承构件540倾斜θ的情况。假设第一传感器621在约70℃的温度气氛中在(x,y,z)的向量坐标下产生(1,1,-1)的特有误差。假设第二传感器622在约70℃的温度气氛中在(x,y,z)的坐标下产生(0.8,0.7,-1.1)的特有误差。假设第三传感器623在约70℃的温度气氛中在(x,y,z)的坐标下产生(0.6,0.7,-1)的特有误差。此外,假设第四传感器624在约70℃的温度气氛中在(x,y,z)的坐标下产生(0.5,0.8,-1.2)的特有误差。
[0252]
假设在基板式传感器600以第一角度提供的状态下,当基板式传感器1600倾斜θ时,向量坐标为(2,0.5,-9.3)。在根据第一操作以第一角度提供基板式传感器600的状态下测量的第一传感器621的测量值v1为(3,1.5,-10.3),第二传感器622的测量值v1为(2.8,1.2,-10.4),第三传感器623的测量值v1为(-2.6,4,-10.3),且第四传感器624的测量值v1为(-2.7,4.1,-10.5)。此外,在根据第二操作以第二角度提供基板式传感器600的状态下测量的第一传感器621的测量值v2为(1,0.5,-10.3),且第二传感器622的测量值v2为(-1.2,0.2,-10.4)。第三传感器623为(3.8,-2.6,-10.3),且第四传感器624为(3.7,-2.5,-10.5)。当晶圆设置成水平支承时,存在基本测量值,且,通过在向量和中添加传感器的特有误差来测量测量值。因此,当第一传感器621中的v1-v2为(2.8,1.2,0),第二传感器622中的v1-v2为(2.8,1,0),第三传感器623中的v1-v2为(-6.4,-6.6,0),且第四传感器624中的v1-v2为(-6.4,-6.6,0)时,判定该状态非水平状态。
[0253]
比较结果如表10中所示。
[0254]
[表10]第一温度气氛中图13状态下的测量值
[0255][0256]
在基板式传感器600以第一角度提供的状态下,当基板式传感器600倾斜θ时向量坐标x值及y值经由(v1-v2)/2知道。(v1-v2)/2为(x,y,0)。因此,当判定支承构件不处于水平状态时,可经由公式判定倾角。在本实施例中,经由第一传感器621及第二传感器622导出的(v1-v2)/2为(x,y,0)=(2,0.5,0)。在本实施例中,由第三传感器623及第四传感器624导出的(v1-v2)/2为(x,y,0)=(-3.2,3.3,0)。根据坐标旋转,即使值不同,亦存在差异。在此,当考虑加速度传感器中使用的加速度g值为地球的重力加速度时,平面的倾斜θ的z值可作为g*sin(a)的值获得,因为当通过使用极坐标计算z值时,x值及y值是经由图5参考的已知值。在另一方法中,z值可通过使用勾股定理经由获得。z值是在考虑重力方向的情况下获得的。在基板式传感器600以第一角度提供的状态下,当基板式传感器600倾斜θ时的向量坐标可通过使用加速度传感器作为获得。
[0257]
此外,(x值的特有误差,y值的特有误差,v1(或v2)的z值)可经由(v1+v2)/2驱动。举例而言,在本实例中,在第一传感器621的情况下,(v1+v2)/2为(1,1,-10.3),且在第二传感器622的情况下,(v1+v2)/2为(0.8,0.7,-10.4)。此外,在第三传感器623的情况下,(v1+v2)/2=(0.6,0.7,-10.3),且在第四传感器624的情况下,(v1-v2)/2=(x,y,0)=(0.5,0.8,-10.5)。此外,可通过差值v1(z)或v2(z)及的倾斜值的「z」值来计算z值的特有误差。
[0258]
上述实施例及公式对应于本发明概念的实施例。一般技术人士可基于说明书中描述的发明概念的精神推导出未揭示的各种公式及实施例。
[0259]
图16是示意性地图示图1的超临界处理设备的另一实施例的视图,且是图示容器打开状态的横截面图。图17是图示根据图16的实施例的超临界处理设备的容器关闭的状态的横截面图。将参考图16及图17描述本发明概念的另一实施例。
[0260]
基板处理设备500a可包括容器520、第一基板支承部分540、第二基板支承部分583、第一供应端口531、第二供应端口533、及排气端口532。
[0261]
容器520可提供干燥基板的空间。该空间可包括处理区域502及缓冲区域504。处理区域502可以是对应于基板「w」的上表面的区域,而缓冲区域504可以是位于基板「w」之下的区域。容器520可包括上部容器522及下部容器524。上部容器522可包括上壁及第一侧壁。上部容器522的上壁可以是容器520的上壁。上部容器522的第一侧壁可以是容器520侧壁的一部分。下部容器524可包括下壁及第二侧壁。下部容器524的下壁可以是容器520的下壁。下部容器524的第二侧壁可以是容器的侧壁的一部分。
[0262]
由于上部容器522及下部容器524通过驱动机构(未图标)相对移动,其可彼此啮合,以便在容器520关闭的闭合位置(图17的图标)与容器520打开的开口位置(图16的图标)之间切换。举例而言,上部容器522及下部容器524中的至少任意一者可沿着彼此耦接或彼此分离的提升杆(未图示)向上及向下移动。在容器520的开口位置处,基板「w」可装入容器520内部或自容器520内部卸下。在容器520的闭合位置处,可对基板「w」执行超临界干燥工艺。
[0263]
第一基板支承部分540可设置于容器520中,且可在基板「w」载入容器中时支承基板「w」。如图16中所示,当在容器520的开口位置处将基板「w」装入容器内部或自容器内部卸下时,第一基板支承部分540可支承基板「w」。第二基板支承部分583可设置于容器520中,且当基板「w」在容器520的内部处理时,第二基板支承部分583可支承基板「w」。如图17中所示,当在容器520的闭合位置处对基板「w」执行超临界流体处理时,第二基板支承部分583可支承基板「w」。
[0264]
第一基板支承部分540可包括自上部容器522的上壁延伸的第一支承构件,以在与上壁通过第一距离间隔开的位置处支承基板「w」。第一基板支承部分540可在容器520的闭合位置处,在距下部容器524的下壁的第一高度处支承基板「w」。
[0265]
在容器520的开口位置处,装入容器内部或自容器内部卸下的基板「w」可由第一基板支承部件540临时支承。由第一基板支承部分540支承的基板「w」的上表面可面向上部容器522的上壁,且基板「w」的下表面可面向下部容器524的下表面。
[0266]
基板处理设备500a可包括设置于下部容器524的下壁与第一基板支承部分540之间的挡板580。挡板580可安装为通过预设距离与下部容器524的下壁间隔开。挡板580可通过支承构件582固定至下部容器524的下壁上。挡板580可包括具有特定厚度的板,该板占据缓冲区域504中的特定空间。挡板580可阻止来自第一供应端口531的超临界流体直接喷射至基板「w」的后表面。缓冲区域504的体积可通过挡板580减小。缓冲区域504的体积可小于处理区域502的体积。因此,存在于基板「w」下方的缓冲区域504中的超临界流体的量可小于存在于基板「w」上的处理区域502中的超临界流体的量。挡板580可通过在基板「w」下方的缓冲空间中提供结构来减少处理时间,以保持处理性能,同时减少用于干燥处理的超临界流体的量,从而减少缓冲空间。
[0267]
第二基板支承部分583在与上部容器522的上壁通过第二距离间隔开的位置处支承基板「w」。第二支承构件可自容器的闭合位置处的下部容器524的下壁以大于第一高度的第二高度支承基板「w」。
[0268]
第二基板支承部分583可设置于挡板580上,以支承基板「w」。第二基板支承部分
583可包括向上延伸形成挡板580的上表面的多个第二支承突起152。第二支承突起可自挡板580向上延伸,以接触并支承基板「w」的中心区域。
[0269]
尽管第二基板支承部分583设置于挡板580上,但本发明概念不限于此,且第二基板支承部分583可安装为与下部容器524的下壁具有预设高度。
[0270]
当容器520打开时,构成第二基板支承部分583的第二支承突起可与下部容器524一起移动。随后,基板「w」可载入容器520的内部,以固定于第一基板支承部分540的第一支承突起上。当容器520关闭时,构成第二基板支承部分583的第二支承突起可与下部容器524一起升高。由于构成第二基板支承部分583的第二支承突起的高度大于第一基板支承部分540的第一支承突起的高度,故基板「w」可固定于构成第二基板支承部分583的第二支承突起上。随后,可在由第二基板支承部分583支承的基板「w」上执行超临界干燥工艺。
[0271]
根据图14及图15中引用的另一实施例,将基板式传感器600或1600提供至超临界处理设备,以测量第二基板支承部分583的倾斜。
[0272]
此外,作为本发明概念的实施例,已描述提供至超临界处理设备以测量支承构件水平度的项目,但其可适用于在伴随温度改变的气氛环境中要求高精度的水平度测量。
[0273]
此外,由于本发明概念适用于在特定环境条件下执行测量,故与加速度传感器使用校正系数校正对温度敏感的项目的方法相比,在详细情况下可达成更高的测量精度。
[0274]
详言之,已描述在高温环境中特有误差很大,但水平度可在室温及低温下测量。
[0275]
由上述基板式传感器600及基板式传感器1600测量的支承构件540的倾斜可通过存储可由处理器执行的程序代码的非暂时性计算机可读介质来计算。
[0276]
根据本发明概念的一实施例,可测量位于提供高温/高压气氛的容器内部的基板支承构件的闲置状态以及工艺期间基板支承构件的水平状态,以通过使用超临界流体处理基板(例如,晶圆)、及通过使用其测量水平度的方法。
[0277]
根据本发明概念的实施例,位于提供高温/高压气氛的容器内部的基板支承构件的闲置状态及工艺期间基板支承构件的水平状态可以不超过0.1度的单位来测量,以通过使用超临界流体处理基板(例如,晶圆)、及通过使用其测量水平度的方法。
[0278]
本发明概念的效果不限于上述效果,本发明概念所属领域的熟练技术人士可自说明书及随附附图中清楚地理解未提及之效果。
[0279]
虽然已参考实施例描述本发明概念,但熟习此项技术者显然可在不脱离本发明概念的精神及范畴的情况下进行各种更改及修改。因此,应理解,上述实施例并非限制性而是说明性的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1