一种晶圆片甩干机及实现方法与流程
1.本发明属于半导体加工技术领域,具体涉及一种晶圆片甩干机及实现方法。
背景技术:
2.晶圆是指硅半导体集成电路制作所用的硅晶片,由于其形状为圆形,故称为晶圆,在硅晶片上可加工制作成各种电路元件结构,而成为有特定电性功能的电子元器件产品。
3.在对晶圆片进行加工时,通常先对晶圆片进行贴膜保护,并在保护膜的边缘粘接有磁性金属制成的环形支撑板,从而将保护膜抻紧,然后将晶圆片放入到划片机中,对晶圆片的背部进行机械切割,由于切割过程中需要对晶圆片进行喷淋降温和清洗,再人工将湿润的晶圆片擦拭干净。工作人员对晶圆片擦拭时,容易对晶圆片表面产生划痕,从而导致晶圆片表面质量不合格而报废。
技术实现要素:
4.本发明的目的是提供一种晶圆片甩干机及实现方法,从而解决清理晶圆片上的水滴时,减少对晶圆片表面产生划痕的技术问题。
5.为解决上述技术问题,本发明提供了如下的技术方案:
6.一种晶圆片甩干机,包括箱体以及设置于箱体顶部的筒体,所述筒体顶部铰接有筒盖,所述筒盖中部设置有镜头朝下的相机;所述筒体中部设置有托盘,所述托盘底部连接有转轴,所述转轴的下端旋转连接至箱体的底壁上;所述筒体底部设置有出水孔,所述出水孔底部设置有环形水槽,所述水槽上设置有排水管;所述筒体外壁设置有与筒体内侧导通的环形气路,所述气路上设置有吹气管,所述吹气管上连接有鼓风机;所述箱体内设置有动力件和真空泵,所述转轴上设置有传动组件,所述传动组件连接至动力件;所述转轴内部设置有气管,所述气管一端连接至托盘中部另一端连接至真空泵。
7.可选的,所述托盘包括圆台以及多个直径依次增大的一层圆环,所述圆台中部设置有支撑杆,所述支撑杆向外依次连接每个一层圆环,所述支撑杆端部上侧设置有二层圆环,所述圆台、一层圆环和二层圆环同心。
8.可选的,所述传动组件包括固定于转轴上的从动带轮、与从动带轮等高设置的主动带轮以及套设于从动带轮和主动带轮上的皮带,所述主动带轮连接动力件的输出端,所述动力件为伺服电机。
9.可选的,所述筒体底部设置有截面为倒置梯形的环形导流槽,所述出水孔设置于导流槽的底部。
10.可选的,所述环形气路包括固定于筒体外壁的导气管,所述导气管与筒体之间设置有多个导气孔,所述导气孔倾斜向下设置。
11.可选的,所述筒盖中部开设有观察窗,所述观察窗的底部设置有保护玻璃,所述相机设置于保护玻璃上侧。
12.可选的,所述转轴底部设置有轴承,所述轴承外侧套设有轴承座,所述轴承座底部
设置有支撑柱,所述支撑柱连接至箱体的底壁上。
13.一种基于上述一种晶圆片甩干机的实现方法,包括:
14.打开筒盖,将晶圆片放置于托盘上,启动真空泵对晶圆片进行吸附;
15.关闭筒盖,启动动力件通过传动组件带动转轴旋转;
16.通过转轴带动托盘旋转,晶圆片随拖托盘一同发生转动,基于离心作用力将晶圆片上的水滴甩到筒体内壁上;
17.通过鼓风机将空气沿吹气管吹入气路,空气吹向晶圆片上;
18.通过出水孔将水滴导入水槽,并通过排水管排出;
19.达到预设时间时,关闭动力件和鼓风机,通过相机采集晶圆片的图像数据;
20.将图像数据输入预构建的水滴检测模型判断晶圆片上是否仍存在水滴,若存在,则重新启动动力件和鼓风机;
21.若不存在,则打开筒盖,关闭真空泵,将甩干后的晶圆片取出。
22.可选的,其特征在于,所述水滴检测模型的构建包括:
23.构建水滴检测的深度学习网络;
24.采集含有水滴的晶圆片的图像数据并分别对水滴进行人工标注;
25.将标注后的图像数据划分为训练集、测试集和验证集;
26.将训练集输入深度学习网络得到预测输出,根据预测输出和验证集计算网络损失;
27.采用网络损失进行反向传播迭代深度学习网络的网络参数;
28.根据迭代的网络参数更新深度学习网络,并通过测试集测试更新后的深度学习网络,直到满足预设标准,得到水滴检测模型。
29.可选的,所述根据预测输出和验证集计算网络损失包括:
30.采用交叉熵损失函数计算网络损失,其表达式如下:
[0031][0032]
其中,x表示样本,n为样本数量,y表示验证集中标注信息,a表示预测输出的预测信息。
[0033]
与现有技术相比,本发明的有益效果是:
[0034]
本发明提供一种晶圆片甩干机及实现方法,将晶圆片放置于托盘上,启动真空泵对晶圆片进行吸附;启动动力件通过传动组件带动转轴旋转;通过转轴带动托盘旋转,晶圆片随拖托盘一同发生转动,基于离心作用力将晶圆片上的水滴甩到筒体内壁上;在旋转的同时启动鼓风机将空气导入加速水滴的分离和排出;通过相机采集晶圆片的图像数据;将图像数据输入预构建的水滴检测模型判断晶圆片上是否仍存在水滴,若存在,则重新启动动力件和鼓风机;若不存在,将甩干后的晶圆片取出;综上能够快速的对晶圆片进行甩干并且不会产生划痕。
附图说明
[0035]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实
施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
[0036]
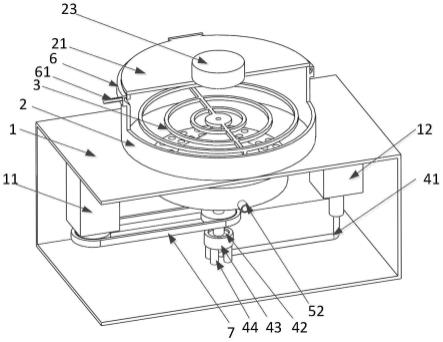
图1是本发明实施例一提供的一种晶圆片甩干机的内部示意图;
[0037]
图2是本发明实施例一提供的一种晶圆片甩干机的截面示意图;
[0038]
图3是本发明实施例提供一的一种晶圆片甩干机的气路示意图;
[0039]
图4是本发明实施例提供二的一种晶圆片甩干机的实现方法流程图;
[0040]
图中标记为:
[0041]
1.箱体,11.动力件,12.真空泵,
[0042]
2.筒体,21.筒盖,22.观察窗,23.相机,
[0043]
3.托盘,31.圆台,32.一层圆环,33.支撑杆,34.二层圆环,
[0044]
4.转轴,41.气管,42.轴承,43.轴承座,44.支撑柱,
[0045]
5.出水孔,51.水槽,52.排水管,53.导流槽,
[0046]
6.气路,61.吹气管,62.导气管,63.导气孔,
[0047]
7.传动组件,71.从动带轮,72.主动带轮,73.皮带。
具体实施方式
[0048]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0049]
实施例一:
[0050]
如图1-2所示,一种晶圆片甩干机,包括箱体1以及设置于箱体1顶部的筒体2,筒体2顶部铰接有筒盖21,筒盖21中部设置有镜头朝下的相机23;筒体2中部设置有托盘3,托盘3底部连接有转轴4,转轴4的下端旋转连接至箱体1的底壁上;筒体2底部设置有出水孔5,出水孔5底部设置有环形水槽51,水槽51上设置有排水管52;筒体2外壁设置有与筒体2内侧导通的环形气路6,气路6上设置有吹气管61,吹气管61上连接有鼓风机;箱体1内设置有动力件11和真空泵12,转轴4上设置有传动组件7,传动组件7连接至动力件11;转轴4底部设置有轴承42,轴承42外侧套设有轴承座43,轴承座43底部设置有支撑柱44,支撑柱44连接至箱体1的底壁上,转轴4内部设置有气管41,气管41一端连接至托盘3中部另一端连接至真空泵12。
[0051]
具体的,托盘3包括圆台31以及多个直径依次增大的一层圆环32,圆台31中部设置有支撑杆33,支撑杆33向外依次连接每个一层圆环32,支撑杆33端部上侧设置有二层圆环34,圆台31、一层圆环32和二层圆环34同心。通过一层圆环32起到晶圆片的承载,通过二层圆环34起到晶圆片的圆周固定,通过一层圆环32和二层圆环34的设置减少托盘3与晶圆片的接触面积,便于在旋转时将水滴甩出。
[0052]
传动组件7包括固定于转轴4上的从动带轮71、与从动带轮71等高设置的主动带轮72以及套设于从动带轮71和主动带轮72上的皮带73,主动带轮72连接动力件11的输出端,动力件11为伺服电机。通过伺服电机可以调节转轴4的转速,从而对晶圆片旋转进行调速,控制离心力大小,便于在旋转时将水滴甩出。
[0053]
筒体2底部设置有截面为倒置梯形的环形导流槽53,出水孔5设置于导流槽53的底
部。通过导流槽53的倾斜面方便将离心力甩出的水滴流入出水孔5。
[0054]
如图3所示,环形气路6包括固定于筒体2外壁的导气管62,导气管62与筒体2之间设置有多个导气孔63,导气孔63倾斜向下设置;通过鼓风机将空气吹入导气管62,空气从导气管62进入导气孔63朝向晶圆片排出,可以加速晶圆片上水滴的分离,空气从出水孔进入水槽51然后从排水管52排出,空气在排出的同时促进了水滴的排出。
[0055]
筒盖21中部开设有观察窗22,观察窗22的底部设置有保护玻璃,相机23设置于保护玻璃上侧;通过相机23采集晶圆片的图像数据从而判断甩干是否完成。
[0056]
实施例二:
[0057]
如图4所示,一种基于实施例一的一种晶圆片甩干机的实现方法,包括以下步骤:
[0058]
(1)打开筒盖,将晶圆片放置于托盘上,启动真空泵对晶圆片进行吸附;
[0059]
(2)关闭筒盖,启动动力件通过传动组件带动转轴旋转;
[0060]
(3)通过转轴带动托盘旋转,晶圆片随拖托盘一同发生转动,基于离心作用力将晶圆片上的水滴甩到筒体内壁上;
[0061]
(4)通过鼓风机将空气沿吹气管吹入气路,空气吹向晶圆片上;
[0062]
(5)通过出水孔将水滴导入水槽,并通过排水管排出;
[0063]
(6)达到预设时间时,关闭动力件和鼓风机,通过相机采集晶圆片的图像数据;
[0064]
(7)将图像数据输入预构建的水滴检测模型判断晶圆片上是否仍存在水滴,
[0065]
若存在,则重新启动动力件和鼓风机;
[0066]
若不存在,则打开筒盖,关闭真空泵,将甩干后的晶圆片取出。
[0067]
具体的,水滴检测模型的构建包括:
[0068]
构建水滴检测的深度学习网络;
[0069]
采集含有水滴的晶圆片的图像数据并分别对水滴进行人工标注;
[0070]
将标注后的图像数据划分为训练集、测试集和验证集;
[0071]
将训练集输入深度学习网络得到预测输出,根据预测输出和验证集计算网络损失;采用交叉熵损失函数计算网络损失,其表达式如下:
[0072][0073]
其中,x表示样本,n为样本数量,y表示验证集中标注信息,a表示预测输出的预测信息。
[0074]
采用网络损失进行反向传播迭代深度学习网络的网络参数;
[0075]
根据迭代的网络参数更新深度学习网络,并通过测试集测试更新后的深度学习网络,直到满足预设标准,得到水滴检测模型。
[0076]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1