一种4D毫米波成像雷达的微带天线阵列设计的制作方法
一种4d毫米波成像雷达的微带天线阵列设计
技术领域
1.本发明涉及毫米波雷达技术领域,具体为一种4d毫米波成像雷达的微带天线阵列设计。
背景技术:
2.毫米波雷达是智能驾驶(adas)系统不可缺少的关键部件,在汽车行驶的过程中,通过对周边机动车、非机动车、行人以及相关路况的探测,获取周边目标物体的距离、速度、方位和角度等信息,供adas系统决策。特别是全天候工作能力强,这是通过光感知的激光、视频等传感器不可替代的优点,因此,在adas系统和未来无人驾驶中具有不可替代的作用。
3.目前的车载雷达存在角度分辨能力低的问题,成像能力满足不了智能驾驶的需要,比如特斯拉在佛罗里达两次撞到前方穿行车辆。这就使得当前的高级别自动驾驶系统仍然配置有激光雷达,但是激光雷达存在环境适应性不足以及难以达到车规要求的问题,限制了智能驾驶技术的发展和应用。l3以上级别的自动驾驶系统对雷达传感器提出了方位、俯仰二维高角分辨率能力,类比激光雷达的点云目标输出能力等要求。
4.4d毫米波成像雷达可应用于车端智能驾驶和路端智慧交通领域,主要功能是实时高精度重建环境和目标三维几何信息和运动信息,建立雷达放置点与目标之间的相对空间位置关系以及相对运动速度,构建车辆运行场景,为车端和路端提供丰富的道路场景信息,支撑高级别的自动驾驶和高级别的智慧道路建设。
5.目前业内在着重研究在增加收发天线数量后兼顾角度分辨率和成本,已经取得了一些成果,但是效果不尽人意。例如发明cn112924938a提到的一种12发16收毫米波4d成像雷达微带天线阵列,俯仰发射天线组与接收天线组距离过近,收发隔离度差,且俯仰向天线组分布在射频板的一侧,不利于天线馈线走线,工程实现的可能性不大,难以真正应用并最终形成产品,另外该发明设计的天线阵列设计没有考虑芯片级联所需的功分器网络问题,按其设计功分器网络难以扇出,高频本振功分线需要打孔穿层,增加的设计风险和可靠性,且增加的一层高频板材,不具有成本优势且成板良品率低,为此,我们提出一种4d毫米波成像雷达的微带天线阵列设计。
技术实现要素:
6.本发明的目的在于提供一种4d毫米波成像雷达的微带天线阵列设计,具备能够提供水平和俯仰两维高角度分辨能力,硬件设计简单,便于工程化实现的优点,解决了功分器网络难以扇出,高频本振功分线需要打孔穿层,增加的设计风险和可靠性,且增加的一层高频板材,不具有成本优势且成板良品率低的问题。
7.为实现上述目的,本发明提供如下技术方案:一种4d毫米波成像雷达的微带天线阵列设计,包括12根发射天线和16根接收天线的布局以及两个功分器扇出网络,所述12根发射天线分为两组,一组水平分布,另外一组俯仰分布,其中水平分布发射天线组与俯仰发射天线组共用1根发射天线,所述16根接收天线分为两组,两组接收天线各8根,两组接收天
线的组内均匀分布,所述两个功分器扇出网络,分别位于发射天线区和接收天线区,接收天线区域的功分器1由主芯片输入,输出分两路分别推动主芯片本身和从芯片1,发射天线区域的功分器2由主芯片输入,输出分两路分别推动从芯片2和从芯片3,两个功分器扇出在天线面。
8.优选的,所述12根发射天线,第一组7根发射天线呈水平均匀分布,间距为8dx,第二组5根发射天线与第一组1根发射天线进行组合呈俯仰非均匀分布,俯仰向天线间距为1dz、5dz、3dz、2dz、2dz,水平向间距为均匀分布,间距为1dx。
9.优选的,所述16根接收天线分为两组各8根的水平分布天线,每组8根天线的内部水平间距为1dx,两组天线之间的水平间距为48dx。
10.优选的,所述接收天线和发射天线的工作频率为76~81ghz。
11.优选的,所述功分器为三端口微带功分器,工作频率为19~20.25ghz。
12.优选的,所述接收天线和发射天线基本间距dx为半波长,基本间距dz为1.5倍半波长。
13.与现有技术相比,本发明的有益效果如下:
14.本发明利用12根发射天线分为两组,一组水平分布,另外一组俯仰分布,其中水平分布发射天线组与俯仰发射天线组共用1根发射天线,在俯仰方向采用最小冗余阵,充分利用了稀疏布阵,减少了天线冗余,经mimo通道虚拟后,在水平向的阵面最大口径为112个半波长,俯仰向阵面最大口径为21个半波长,大幅度同时改善了水平和俯仰两个方向的角度分辨率,与现有产品相比,方位角分辨率可以由1.19
°
提高到1.02
°
,俯仰角分辨率可以由6.36
°
提高到5.46
°
,同时本发明设计的天线阵列给出了功分网络扇出方式,最终达到功分器网络与天线阵列共面,降低了成本,便于工程化实现。
附图说明
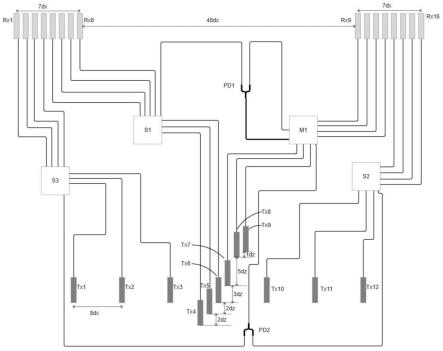
15.图1为本发明实施例的4d毫米波成像雷达微带天线阵列示意图;
16.图2为本发明实施例的4d毫米波成像雷达微带天线阵列经mimo虚拟后的虚拟收发天线阵列图;
17.图3为本发明实施例的4d毫米波成像雷达微带天线阵列参与水平角度解算的虚拟收发天线阵列图;
18.图4为本发明实施例的4d毫米波成像雷达微带天线阵列通过已解算水平角度求解俯仰角度的虚拟收发天线阵列图。
具体实施方式
19.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
20.参阅图1,本发明实施例的4d毫米波成像雷达微带天线阵列包括12根发射天线tx1、tx2、
…
、tx12和16根接收天线rx1、rx2、
…
、rx16,12根发射天线tx1、tx2、
…
、tx12分为两组,第一组发射天线中所有发射天线tx1、tx2、tx3、tx6、tx10、tx11、tx12位于同一水平位
置,且相邻两根发射天线的水平间距为8dx,第二组发射天线中所有发射天线tx4、tx5、tx6、tx7、tx8、tx9相邻两根发射天线的水平间距为1dx,垂直间距依次为2dx、2dx、3dx、5dx、1dx,如图所示,第一组发射天线与第二组发射天线共用发射天线tx6,16根接收天线rx1、rx2、
…
、rx16分为两组,两组天线各8根,两组天线位于同一水平位置,组内水平间距为1dx,组间天线间距为48dx。
21.参阅图1,两个功分器扇出网络,分别位于发射天线区和接收天线区,接收天线区域的功分器pd1由主芯片m1输入,输出分两路分别推动主芯片m1本身和从芯片s1,发射天线区域的功分器pd2由主芯片输入,输出分两路分别推动从芯片s2和从芯片s3,两个功分器扇出在天线面,无需另外增加高频板材层。
22.在本实施例中,可设置接收天线和发射天线的工作频率为76~81ghz。
23.在本实施例中,功分器可选择威尔金森三端口微带功分器,可设置工作频率19~20.25ghz。
24.在本实施例中,可设置接收天线和发射天线基本间距dx为半波长,基本间距dz为1.5倍半波长。
25.本发明设计的收发天线布局可适用于时分复用多发多收(tdm-mimo)、相分多发多收(cdm-mimo)以及频分复用多发多收(fdm-mimo)毫米波雷达系统,在本实例中以分时复用多发多收(tdm-mimo)系统进行论述,12根发射天线tx1、tx2、...、tx12采用分时发射,结合16根接收天线rx1、rx2、...、rx16,mimo虚拟后的收发天线阵列如图2所示,共虚拟形成196个虚拟收发天线通道,由tx1、tx2、tx3、tx6、tx10、tx11、tx12等7根发射天线结合16根接收天线mimo虚拟形成的水平线阵列有112个虚拟等效天线,虚拟等效后的水平线性阵列如图3所示,由tx4、tx5、tx6、tx7、tx8、tx9等6根发射天线与任意一组8根接收天线虚拟形成的二维面阵有48个虚拟等效天线,虚拟等效后的水平线性阵列如图4所示,俯仰最大分布的等效天线为14根。
26.根据角度分辨率的计算公式:θres=λ/(d*cos(θ)),d为阵面口径,等效为天线个数n与基本间距d之间的乘积,水平方向等效于112根天线,基本间距dx为半波长,将上述参数代入计算公式,可以得到水平方向的0
°
方位的角度分辨率为0.0179rad,约等于1.02
°
;而俯仰方向等效于14根天线,基本间距dz为1.5倍半波长,将上述参数代入计算公式,可以得到俯仰方向的0
°
方位角度分辨率为0.0952rad,约等于5.46
°
,跟现有公开的技术方案相比,方位角及俯仰角分辨率均大幅度提高,并且由于本发明中天线布局时考虑了功分器网络、射频前端芯片位置分布及天线馈线走线等问题,阵面布局合理,结构紧凑,可直接工程化实现。
27.通过上述方式,本发明实施例的4d毫米波成像雷达微带天线阵列阵列跟现有一些技术方案相比,在不增加硬件成本的前提下,实现了更高的水平角以及俯仰角分辨率,其中水平角分辨率提高了1.1667倍,俯仰角度分辨率提高了1.1648倍。
28.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1