一种贴合机的焊接装置的制作方法
1.本实用新型涉及信号晶片贴合加工技术领域,尤其是一种贴合机的焊接装置。
背景技术:
2.信号晶片主要用于硅半导体集成电路的制作;目前,现有技术中的贴合机主要是将晶片安装在基板上,其采用吸嘴的方式。而本技术是将晶片进行双层或多层组合并进行焊接并获得信号晶片;但是,现有技术中暂无全自动的晶片组合焊接的贴片装置。
3.为此,申请人特提出了一种信号晶片的贴合机,其由沿晶片行进方向依次布设的晶片裁剪组件和贴合焊接组件组成。在晶片裁剪组件裁剪获得两层后,需要进行焊接,但是,现有技术暂无与之匹配的贴合焊接组件。
技术实现要素:
4.针对上述问题,本实用新型的目的在于提供一种贴合机的焊接装置,本实用新型采用的技术方案如下:
5.一种贴合机的焊接装置,用于接收晶片裁剪组件的进料,其包括第二工作台,沿晶片行进方向依次布设在第二工作台上的超声波焊接模组、第二ccd检测机构和压料裁料机构,设置在第二工作台上、且与超声波焊接模组、第二ccd检测机构和压料裁料机构连接的第二流道架,与第二流道架连接的收料盘,设置在第二工作台上、且与第二流道架匹配的数个送料机构,以及设置在第二工作台上、且置于第二流道架的尾端的第二拉料机构。
6.进一步地,所述超声波焊接模组为第一超声波焊接模组和第二超声波焊接模组。
7.进一步地,所述第一超声波焊接模组包括固定在第二工作台上的第八安装座和定位安装座,固定在第八安装座上的超声波焊接机,以及固定在定位安装座上的定位安装座。
8.优选地,所述第二流道架包括固定在第二工作台上的第九安装座,以及设置在第九安装座上的上流道和下流道。
9.进一步地,所述第二ccd检测机构包括固定在第二工作台上的第十一安装座,沿横向方向布设在第十一安装座上的直线模组,以及设置在直线模组上、并由直线模组驱动行进的第二ccd相机。
10.进一步地,所述第二工作台上设置有第三送料机构和第四送料机构;所述第三送料机构包括固定在第二工作台上的第七安装座,沿纵向方向依次固定在第七安装座上的第二棘轮电机和第三棘轮电机,以及与第二棘轮电机和第三棘轮电机一一对应连接的第二棘轮。
11.与现有技术相比,本实用新型具有以下有益效果:
12.(1)本实用新型巧妙地设置了数个放料盘和裁剪模组,以实现同步放料、裁剪;本实施例通过设置贴合裁剪模组和裁切机构,以实现物料的切割;
13.(2)本实用新型通过设置数个送料机构和拉料机构,且其均采用棘轮电机和棘轮驱动行进,以保证晶片料带沿流道方向可靠行进;
14.(3)本实用新型通过设置ccd检测机构,以检测裁剪、焊接情况,以保证收料盘收卷合格的晶片贴合;
15.(4)本实用新型中的贴合裁剪模组和裁切机构采用偏心驱动轮方式,其匀速驱动动作,保证裁剪均匀可靠;
16.(5)本实用新型通过设置废料裁切拉料模组,以实现晶片料带的废料的裁剪,并利用废料收集槽盒进行回收;
17.综上所述,本实用新型具有结构简单、加工高效可靠等优点,在信号晶片贴合加工技术领域具有很高的实用价值和推广价值。
附图说明
18.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需使用的附图作简单介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对保护范围的限定,对于本领域技术人员来说,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
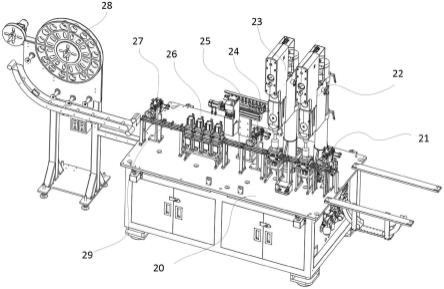
19.图1为本实用新型的结构示意图。
20.图2为本实用新型的晶片裁剪组件的结构示意图。
21.图3为本实用新型的上裁剪模组的结构示意图。
22.图4为本实用新型的第二送料机构的结构示意图。
23.图5为本实用新型的裁切机构的结构示意图(一)。
24.图6为本实用新型的裁切机构的结构示意图(二)。
25.图7为本实用新型的第一压料机构的结构示意图。
26.图8为本实用新型的第一ccd检测机构的结构示意图。
27.图9为本实用新型的贴合裁剪模组和废料裁切拉料模组的安装示意图(一)。
28.图10为本实用新型的贴合裁剪模组和废料裁切拉料模组的安装示意图(二)。
29.图11为本实用新型的贴合焊接组件的结构示意图。
30.图12为本实用新型的第三送料机构的结构示意图。
31.图13为本实用新型的第一超声波焊接模组的结构示意图。
32.图14为本实用新型的定位模组的结构示意图。
33.图15为本实用新型的第二ccd检测机构的结构示意图。
34.上述附图中,附图标记对应的部件名称如下:
35.1、晶片裁剪组件;2、贴合焊接组件;10、第一工作台;11、放料架;12、上放料盘;13、下放料盘;14、上裁剪模组;15、下裁剪模组;16、料带过渡模组;17、第一送料机构;18、贴合裁剪模组;19、废料裁切拉料模组;20、第二工作台;21、第三送料机构;22、第一超声波焊接模组;23、第二超声波焊接模组;24、第四送料机构;25、第二ccd检测机构;26、压料裁料机构;27、第二拉料机构;28、收料盘;29、第二流道架;141、第二送料机构;142、裁切机构;143、第一ccd检测机构;144、第一压料机构;145、第一拉料机构;146、第一流道架;191、第十安装座;192、废料裁剪流道;193、废料裁剪电机;194、刀片;195、废料收集槽盒;1411、第一安装座;1412、第一棘轮电机;1413、第一棘轮;1421、第二安装座;1422、偏心轮安装座;1423、偏心轮驱动电机;1424、滑板;1425、偏心驱动轮;1426、裁剪磨具;1427、滑板安装槽;1431、第
三安装座;1432、第一ccd相机;1433、ccd背景板;1434、平面镜安装座;1435、平面镜;1441、第五安装座;1442、压料模具;1443、压料电机;1461、第六安装座;1462、第一流道;211、第七安装座;212、第二棘轮电机;213、第三棘轮电机;214、第二棘轮;221、第八安装座;222、超声波焊接机;223、定位安装座;224、定位模组;251、第十一安装座;252、直线模组;253、第二ccd相机;291、第九安装座;292、上流道;293、下流道。
具体实施方式
36.为使本技术的目的、技术方案和优点更为清楚,下面结合附图和实施例对本实用新型作进一步说明,本实用新型的实施方式包括但不限于下列实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本技术保护的范围。
37.实施例
38.如图1至图15所示,本实施例提供了一种信号晶片的贴合机,其由沿晶片行进方向依次布设的晶片裁剪组件1和贴合焊接组件2组成。首先,需要说明的是,本实施例中所述的“第一”、“第二”等序号用语仅用于区分同类部件,不能理解成对保护范围的特定限定。另外,本实施例中所述“底部”、“顶部”、“四周边缘”、“中央”等方位性用语是基于附图来说明的。在本实施例中,ccd相机、超声波焊接机等部件为现有成熟部件,在此就不予赘述其内部结构和原理。不仅如此,本实施例的压料模具、裁剪磨具等部件是根据晶片需要裁剪的样式决定,其磨具本身属于现有部件。
39.在本实施例的贴合机是将两个晶片进行贴合,因此,该晶片裁剪组件1包括放料架1和第一工作台10,设置在放料架1上的上放料盘12和下放料盘13,沿纵向方向依次布设、且与放料盘一一对应的上裁剪模组14和下裁剪模组15,固定在第一工作台10上、并接收上裁剪模组14和下裁剪模组15下料的料带过渡模组16,设置在第一工作台10上的贴合裁剪模组18和废料裁切拉料模组19,与裁剪模组和贴合裁剪模组18连接、供晶片料带行进支撑的第一流道架146,以及设置在第一工作台10上、驱动晶片料带行进的数个第一送料机构17。其中,第一流道架146包括固定在第一工作台10上的第六安装座1461,设置在第六安装座1461上的第一流道1462。
40.如图3所示,本实施例的上裁剪模组14和下裁剪模组15的结构均相同,在此就以上裁剪模组14为例,其由沿晶片行进方向依次布设、且与第一流道架146匹配的第二送料机构141、裁切机构142、第一ccd检测机构143、第一压料机构144和第一拉料机构145组成。其中,第二送料机构141和第一拉料机构145提供晶片料带行进驱动,并利用裁切机构142进行裁剪,裁剪后,利用第一ccd检测机构143检测裁剪情况,并利用第一压料机构144进行压料去除毛刺。
41.按照晶片物料行进方向依次来说,本实施例的送料机构和拉料机构结构相同,其中,第二送料机构141包括固定在第一工作台10上的第一安装座1411,固定在第一安装座1411上的第一棘轮电机1412,以及与第一棘轮电机1412连接、且与第一流道1462匹配的第一棘轮1413。在本实施例利用第一棘轮挤压驱动晶片料带行进。
42.如图5至图6所示,本实施例的裁切机构142和贴合裁剪模组18结构相同,且裁切机构142包括固定在第一工作台10上的第二安装座1421和裁剪磨具1426,固定在第二安装座
1421上的偏心轮安装座1422和偏心轮驱动电机1423,开设在偏心轮安装座1422内的滑板安装槽1427,设置在滑板安装槽1427内、且与偏心轮驱动电机1423连接的偏心驱动轮1425,以及设置在滑板安装槽1427内、由偏心驱动轮1425驱动上下滑动、并与裁剪磨具1426连接的滑板1424。在本实施例中,利用偏心轮驱动电机1423均速驱动偏心驱动轮1425转动,以实现滑板1424周期性上下移动,并利用裁剪磨具1426进行冲压裁剪。
43.如图8所示,在本实施例中,在裁剪后,需要进行检测,本实施例的第一ccd检测机构143包括固定在第一工作台10上的第三安装座1431,设置在第三安装座1431上、且朝向第一流道架146的第一ccd相机1432,设置在第一流道架146的下部的ccd背景板1433,固定在第一流道架146上、且与ccd背景板1433位置对应的平面镜安装座1434,以及设置在平面镜安装座1434内、且与水平面呈45度夹角、并对ccd背景板1433上的晶片料带进行反射的平面镜1435。本实施例的第一ccd相机1432通过平面镜1435照射ccd背景板1433上的晶片料带,以采集晶片料带的裁剪情况。
44.如图7所示,本实施例的第一压料机构144和压料裁料机构的结构相同,其包括固定在第一工作台10上的第五安装座1441,设置在第五安装座1441上的压料模具1442,以及设置在压料模具1442上的压料电机1443。
45.如图9至图10所示,本实施例的废料裁切拉料模组19包括固定在第一工作台10上的第十安装座191,设置在第十安装座191上的废料裁剪流道192,设置在第十安装座191上的废料裁剪电机193,与废料裁剪电机193连接、用于裁剪废料裁剪流道192上的物料的刀片194,以及设置在第一工作台10上、用于裁剪后的物料的废料收集槽盒195。
46.如图11至图15所示,本实施例的贴合焊接组件2包括第二工作台20,沿晶片行进方向依次布设在第二工作台20上的第三送料机构21、第一超声波焊接模组22、第二超声波焊接模组23、第四送料机构24、第二ccd检测机构25、压料裁料机构26和第二拉料机构,设置在第二工作台20上、且与超声波焊接模组、第二ccd检测机构25和压料裁料机构26连接的第二流道架29,与第二流道架29连接的收料盘28。其中,第二流道架29包括固定在第二工作台20上的第九安装座291,以及设置在第九安装座291上的上流道292和下流道293。
47.如图12所示,本实施例的第三送料机构21包括固定在第二工作台20上的第七安装座211,沿纵向方向依次固定在第七安装座211上的第二棘轮电机212和第三棘轮电机213,以及与第二棘轮电机212和第三棘轮电机213一一对应连接的第二棘轮214。在此,利用上下的棘轮驱动晶片料带行进。
48.如图13至图14所示,在本实施例以第一超声波焊接模组22包括固定在第二工作台20上的第八安装座221和定位安装座223,固定在第八安装座221上的超声波焊接机222,以及固定在定位安装座223上的定位安装座223。
49.如图15所示,本实施例的第二ccd检测机构包括固定在第二工作台20上的第十一安装座251,沿横向方向布设在第十一安装座251上的直线模组252,以及设置在直线模组252上、并由直线模组驱动行进的第二ccd相机253。在本实施例中,直线模组沿第二流道架29方向布设,且第二ccd相机253置于第二流道架29的顶部。
50.在本实施例中,利用上放料盘12和下放料盘13进行放料,并利用上裁剪模组14和下裁剪模组15进行裁剪,裁剪后进入料带过渡模组16,并利用贴合裁剪模组进行贴合裁剪;将废料传输至废料裁切拉料模组19.待焊接的晶片料带进入第三送料机构21,并利用第一
超声波焊接模组和第二超声波焊接模组进行焊接,最终利用收料盘进行收料。
51.上述实施例仅为本实用新型的优选实施例,并非对本实用新型保护范围的限制,但凡采用本实用新型的设计原理,以及在此基础上进行非创造性劳动而作出的变化,均应属于本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1