一种半导体晶圆的定位校正装置及定位校正方法与流程
本发明属于半导体制造,具体地说,涉及一种半导体晶圆的定位校正装置及定位校正方法。
背景技术:
1、晶圆定位是半导体制造和运输过程中的一个重要步骤,用于确保在半导体芯片的制造和运输过程中,将晶圆(也称为芯片基板)准确定位在所需的位置上,之前半导体芯片的运输指的是单个晶圆的运输,但是随着半导体产业的迅猛发展,半导体生产线中的天车(也称为行车)在物料运输和设备布局中起着至关重要的作用,天车系统广泛应用于集成电路产业的自动物料搬运过程中,而在天车运输物料的过程中,物料指的是晶圆盒而不是单个晶圆,晶圆盒的内部存放有多个晶圆,使得晶圆在运输的过程中始终处于超真空以及超洁净的环境中,现有的天车一般按特定任务的特定路线进行搬运控制,难以实现有效的搬运和定位;
2、例如,申请公开号为cn104567854a的专利公开了一种面向半导体生产线搬运系统天车路线规划方法;虽然此类发明通过设计暂存区或利用图论等方式提高了天车在多轨道中的调度效率;但此类发明中的天车轨道结构和天车所执行的功能仍相对简单,难以跨越性地发挥天车系统的搬运效率,并且上述发明方法缺乏在多轨道中对天车之间的协同控制,申请公开号为cn115703105a的专利公开了一种汽车底盘离线整喷工艺及双层转运天车,虽然该专利公开了天车在运输过程中能够将工件进行转运,但是还存在以下缺陷:
3、上述专利中的双层转运天车只是将工件从一个轨道转移到另一个轨道上了,而在晶圆盒运输过程中,需要对天车之间实现协同控制,晶圆盒需要从一个天车转移到另一个天车上,随着技术的发展,天车与天车之间能够实现一定的协同控制,但是天车将晶圆盒进行转移的过程无法实现精确的定位,使得晶圆盒从一个天车转移到另一个天车后,晶圆盒没有处于理想的位置,对后续晶圆盒的储存和运输产生不利的影响。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、为解决上述问题,本发明采用如下的技术方案。
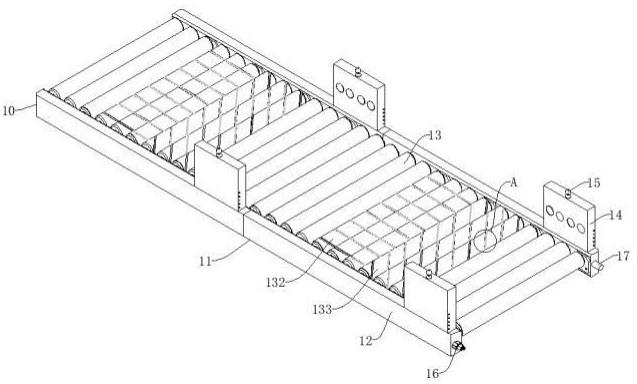
3、一种半导体晶圆的定位校正装置,包括定位装置,定位装置包括两个定位输送部,定位输送部包括有多个输送带辊,输送带辊的表面开设有螺旋槽,螺旋槽的内部固定连接有记忆金属带,两个定位输送部的顶端均固定连接有角度校正部件,角度校正部件包括有容纳箱和高压风扇,高压风扇设置于容纳箱的内部,输送带辊用于输送晶圆盒,半导体晶圆的定位校正装置还包括:
4、摄像头,设置于角度校正部件的顶端,用于获取偏移角度图像,t时间后获取偏移位置图像,时间t为晶圆盒从其中一个定位输送部的一端移动到两个定位输送部之间所需要的时间;
5、偏移信息获取模块,基于偏移角度图像获取偏移角度或基于偏移位置图像获取偏移距离,偏移信息包括偏移角度和偏移距离;
6、第一通电数量生成模块,将偏移角度输入到第一通电数量生成模型中,获取第一通电数量;
7、第二通电数量生成模块,将偏移距离输入到第二通电数量生成模型,获取第二通电数量;
8、控制模块,根据第一通电数量对高压风扇进行通电或者根据第二通电数量对记忆金属带进行通电。
9、优选地,多个输送带辊中包括有m个第一输送带辊和n个第二输送带辊,m和n均为大于等于1的正整数,m个第一输送带辊的表面均开设有第一螺旋槽,n个第二输送带辊的表面均开设有第二螺旋槽,螺旋槽包括第一螺旋槽和第二螺旋槽,第一螺旋槽的螺旋方向与第二螺旋槽的螺旋方向相反,并且第一螺旋槽的内部和第二螺旋槽的内部均固定连接有记忆金属带。
10、优选地,定位输送部还包括两个定位输送主架,多个输送带辊均转动设置于两个定位输送主架之间。
11、优选地,其中一个定位输送主架的一端固定连接有智能插头,其中一个定位输送主架的另一端开设有智能插座。
12、优选地,另一个定位输送主架的一端固定连接有卡柱,另一个定位输送主架的另一端开设有卡槽。
13、优选地,容纳箱靠近输送带辊的一侧开设有多个通风孔,两个角度校正部件之间形成角度校正区域。
14、优选地,两个角度校正部件之间的最短距离等于输送带辊的长度,两个角度校正部件均设置于定位输送主架顶端的一侧。
15、优选地,基于偏移角度图像获取偏移角度的方法为:
16、对图像进行预处理,预处理包括去除噪声、调整图像的亮度和对比度,以及进行图像校正;
17、使用特征检测算法在两个图像中检测出共同的特征点,特征点包括角点、边缘和关键点,所述角点对应晶圆盒的拐角或尖角,边缘对应晶圆盒的边界,关键点对应晶圆盒上的标志或特征纹理;
18、使用特征匹配算法将两个图像中的特征点进行匹配,建立两个图像之间的对应关系;
19、使用特征点的对应关系,生成两个图像之间的变换矩阵;
20、提取变换矩阵中的旋转信息,根据旋转信息获取偏移角度。
21、优选地,第一通电数量为高压风扇通电的数量,第一通电数量生成模型的训练过程为:获取角度调整样本数据集,所述角度调整样本数据集中包括偏移角度和第一通电数量,将角度调整样本数据集划分为角度调整样本训练集和角度调整样本测试集,构建回归网络,以角度调整样本训练集中的偏移角度作为回归网络的输入数据,以角度调整样本训练集中的第一通电数量作为回归网络的输出数据,对回归网络进行训练,得到用于预测第一通电数量的初始回归网络,利用角度调整样本测试集对初始回归网络进行测试,输出满足预设测试准确度的回归网络作为第一通电数量生成模型。
22、优选地,第二通电数量为记忆金属带通电的数量,第二通电数量生成模型的训练过程为:获取位置调整样本数据集,所述位置调整样本数据集中包括偏移距离和第二通电数量,将位置调整样本数据集划分为位置调整样本训练集和位置调整样本测试集,构建回归网络,以位置调整样本训练集中的偏移距离作为回归网络的输入数据,以位置调整样本训练集中的第二通电数量作为回归网络的输出数据,对回归网络进行训练,得到用于预测第二通电数量的初始回归网络,利用位置调整样本测试集对初始回归网络进行测试,输出满足预设测试准确度的回归网络作为第二通电数量生成模型。
23、一种半导体晶圆的定位校正方法,基于上述的半导体晶圆的定位校正装置实现,所述方法包括:
24、获取偏移角度图像,t时间后获取偏移位置图像;
25、基于偏移角度图像获取偏移角度或基于偏移位置图像获取偏移距离;
26、将偏移角度输入到第一通电数量生成模型中,获取第一通电数量;
27、将偏移距离输入到第二通电数量生成模型,获取第二通电数量;
28、根据第一通电数量对高压风扇进行通电或者根据第二通电数量对记忆金属带进行通电。
29、相比于现有技术,本发明的有益效果为:
30、本发明中,定位装置可以根据晶圆盒偏移的角度,控制高压风扇的开启或关闭,使得晶圆盒在被转移的过程中会受到风力影响调整角度,再根据晶圆盒偏移的距离控制记忆金属带的通电状态,使得晶圆盒在被转移的过程中会受到第一螺旋槽或第二螺旋槽影响调整位置,这样在晶圆盒完成转移后会处于理想的位置,方便后续晶圆盒的储存和运输。
- 还没有人留言评论。精彩留言会获得点赞!