一种便于定位的晶圆搬运装置及晶圆搬运方法与流程
本发明涉及晶圆搬运的,尤其涉及一种便于定位的晶圆搬运装置及晶圆搬运方法。
背景技术:
1、在半导体晶圆生产制作及传输过程中,各工序设备之间的对接工作至关重要,前工序向后工序传片的位置必须精准。也就是说,当晶圆处理组件中处理后的晶圆需要被输出时,晶圆处理组件中的机械臂会将晶圆输出至晶圆放置组件中,晶圆放置组件可以移动。每次晶圆传输之前,需要将晶圆放置组件准确无误地移动到机械臂的传输范围内。
2、现有技术中,晶圆放置组件包括型材架,型材架上的晶圆放置位上设置有多个贴有密封条的垫块,将模拟晶圆放置在垫块上,将型材架移动至晶圆处理组件的机械臂位置处,目测模拟晶圆与机械臂的位置,手动调整垫块的数量和位置,确保模拟晶圆位于机械臂可动作范围内,满足机械臂取放晶圆的要求。例如当模拟晶圆的高度需要调整时,需要通过增减垫块来实现,这样操作十分的繁琐不便利,且位置尺寸偏差较大;存在晶圆损坏的风险。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的问题之一。为此,本发明的目的在于提供一种便于定位的晶圆搬运装置及晶圆搬运方法,能够提高晶圆放置组件的定位精准度,提高晶圆搬运效率和搬运准确度。
2、为了实现上述目的,本申请采用如下技术方案:一种便于定位的晶圆搬运装置,包括:
3、晶圆处理组件,包括用于传输晶圆的机械臂;
4、晶圆放置组件,包括晶圆搭载底板、驱动件、定位单元和控制器,所述晶圆搭载底板中设置有晶圆放置位,所述驱动件连接所述晶圆搭载底板;所述定位单元用于检测晶圆放置位与机械臂之间的相对位置,所述控制器根据所述定位单元的检测结果控制驱动件带动晶圆搭载底板移动,直至晶圆放置位与机械臂的位置适配。
5、进一步的,所述晶圆放置组件包括型材架以及位于型材架中的安装平板,所述驱动件位于所示安装平板中;所述驱动件的末端连接所述晶圆搭载底板,且所述驱动件能够带动所述晶圆搭载底板在三维空间内移动。
6、进一步的,所述型材架的底部设置有脚轮。
7、进一步的,所述驱动件包括第一直线电机组、第二直线电机组和第三直线电机组,第一直线电机组、第二直线电机组和第三直线电机组两两相互垂直,且所述第一直线电机组垂直于地面设置,所述第二直线电机组滑动设置在第三直线电机组中,所述第一直线电机组滑动设置在第二直线电机组中,所述晶圆搭载底板滑动设置在第一直线电机组中。
8、进一步的,所述晶圆处理组件靠近所述晶圆放置组件的一侧设置有相互垂直的第一面板和第二面板,所述第一面板和第二面板均垂直于地面;
9、所述定位单元包括第一激光传感器、第二激光传感器和第三激光传感器,所述第一激光传感器、第二激光传感器和第三激光传感器两两垂直;所述第一激光传感器和第二激光传感器分别用于检测第一面板和第二面板的距离;所述第三激光传感器用于检测地面的距离。
10、进一步的,所述驱动件位于安装平板中,所述驱动件的末端连接所述晶圆搭载底板,所述第三激光传感器位于所述晶圆搭载底板靠近地面的一侧,所述安装平板中设置有与所述第三激光传感器适配的检测缺口。
11、进一步的,所述第一激光传感器和第二激光传感器位于所述晶圆搭载底板远离地面的一侧,当所述晶圆放置组件移动至所述晶圆处理组件侧边时,所述第一激光传感器和第二激光传感器分别对准晶圆处理组件中的第一面板和第二面板。
12、进一步的,所述晶圆搭载底板的上表面边缘均匀设置有垫块安装块,所述垫块安装块围成与晶圆适配的圆形;所述垫块安装块中设置有承载晶圆的垫块。
13、进一步的,所述晶圆搭载底板的上表面中心设置有在位传感器,所述在位传感器与控制端通讯连接,所述在位传感器用于检测晶圆放置位中是否有晶圆。
14、本申请提供的一种晶圆搬运的方法,包括:
15、将晶圆放置组件移动至晶圆处理组件侧边处;
16、定位单元检测晶圆放置位与机械臂之间的相对位置,并将检测结果传输至控制器;
17、所述控制器根据检测结果控制驱动件带动晶圆搭载底板移动,直至晶圆放置位位于机械臂的传输范围内;
18、机械臂将晶圆处理组件中的晶圆放置在晶圆放置位中。
19、本申请实施例提供的上述技术方案与现有技术相比具有如下优点:本申请提供的一种便于定位的晶圆搬运装置,包括晶圆处理组件和晶圆放置组件,其中,晶圆处理组件包括用于传输晶圆的机械臂;晶圆放置组件包括晶圆搭载底板、驱动件、定位单元和控制器,所述晶圆搭载底板中设置有晶圆放置位,所述驱动件连接所述晶圆搭载底板;所述定位单元用于检测晶圆放置位与机械臂之间的相对位置,所述控制器根据所述定位单元的检测结果控制驱动件带动晶圆搭载底板移动,直至晶圆放置位与机械臂的位置适配。本申请中晶圆放置组件的位置固定之后,定位单元可以检测晶圆放置位与机械臂之间的相对距离,控制器可以根据检测结果控制驱动件带动晶圆搭载底板中晶圆放置位移动至机械臂运行的工作范围内,提高了晶圆放置位的定位精准度,提高了晶圆搬运效率,避免晶圆放置不当引起的晶圆损坏风险。
20、本申请提供的一种晶圆搬运的方法,当晶圆放置组件的位置固定之后,定位单元可以检测晶圆放置位与机械臂之间的相对距离,控制器可以根据检测结果控制驱动件带动晶圆搭载底板中晶圆放置位移动至机械臂运行的工作范围内,提高了晶圆放置位的定位精准度,提高了晶圆搬运效率,避免晶圆放置不当引起的晶圆损坏风险。
技术特征:
1.一种便于定位的晶圆搬运装置,其特征在于,包括:
2.根据权利要求1所述的一种便于定位的晶圆搬运装置,其特征在于,所述晶圆放置组件包括型材架(11)以及位于型材架(11)中的安装平板(13),所述驱动件位于所示安装平板(13)中;所述驱动件的末端连接所述晶圆搭载底板(23),且所述驱动件能够带动所述晶圆搭载底板(23)在三维空间内移动。
3.根据权利要求2所述的一种便于定位的晶圆搬运装置,其特征在于,所述型材架(11)的底部设置有脚轮(12)。
4.根据权利要求2所述的一种便于定位的晶圆搬运装置,其特征在于,所述驱动件包括第一直线电机组(31)、第二直线电机组(32)和第三直线电机组(33),第一直线电机组(31)、第二直线电机组(32)和第三直线电机组(33)两两相互垂直,且所述第一直线电机组(31)垂直于地面设置,所述第二直线电机组(32)滑动设置在第三直线电机组(33)中,所述第一直线电机组(31)滑动设置在第二直线电机组(32)中,所述晶圆搭载底板(23)滑动设置在第一直线电机组(31)中。
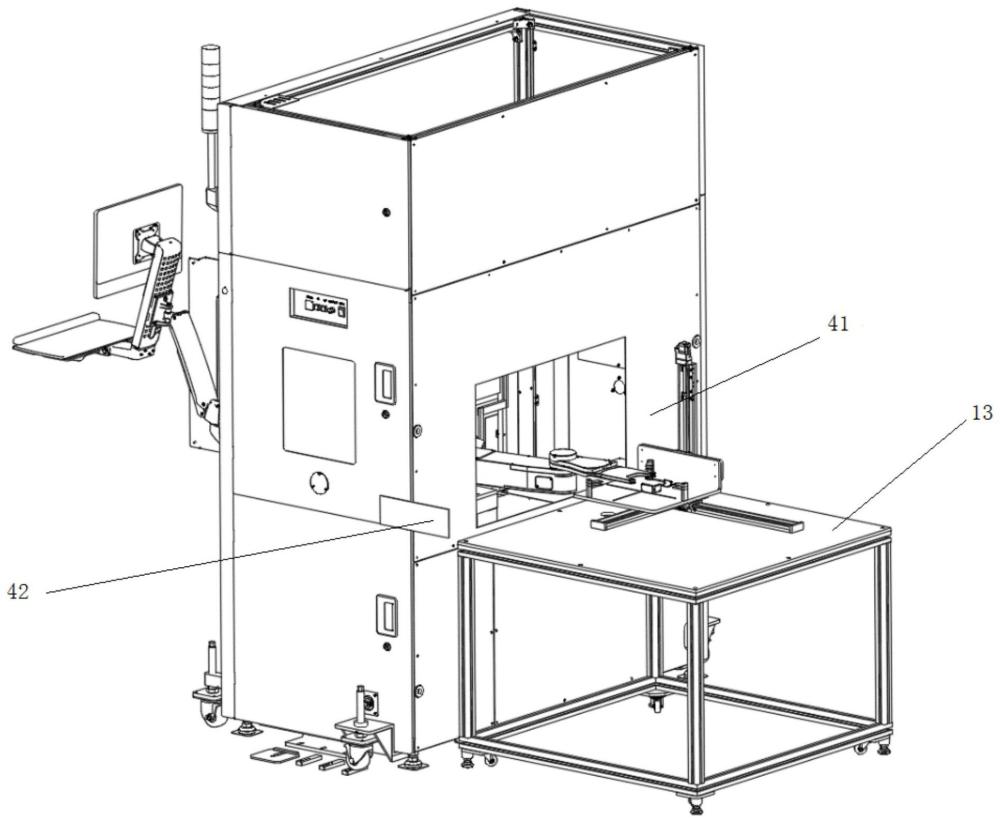
5.根据权利要求1所述的一种便于定位的晶圆搬运装置,其特征在于,所述晶圆处理组件靠近所述晶圆放置组件的一侧设置有相互垂直的第一面板(41)和第二面板(42),所述第一面板(41)和第二面板(42)均垂直于地面;
6.根据权利要求5所述的一种便于定位的晶圆搬运装置,其特征在于,所述驱动件位于安装平板(13)中,所述驱动件的末端连接所述晶圆搭载底板(23),所述第三激光传感器(210)位于所述晶圆搭载底板(23)靠近地面的一侧,所述安装平板(13)中设置有与所述第三激光传感器(210)适配的检测缺口(20)。
7.根据权利要求6所述的一种便于定位的晶圆搬运装置,其特征在于,所述第一激光传感器(28)和第二激光传感器(29)位于所述晶圆搭载底板(23)远离地面的一侧,当所述晶圆放置组件移动至所述晶圆处理组件侧边时,所述第一激光传感器(28)和第二激光传感器(29)分别对准晶圆处理组件中的第一面板(41)和第二面板(42)。
8.根据权利要求1所述的一种便于定位的晶圆搬运装置,其特征在于,所述晶圆搭载底板(23)的上表面边缘均匀设置有垫块安装块(26),所述垫块安装块(26)围成与晶圆(4)适配的圆形;所述垫块安装块(26)中设置有承载晶圆(4)的垫块。
9.根据权利要求1所述的一种便于定位的晶圆搬运装置,其特征在于,所述晶圆搭载底板(23)的上表面中心设置有在位传感器(21),所述在位传感器(21)与控制端通讯连接,所述在位传感器(21)用于检测晶圆放置位中是否有晶圆(4)。
10.一种基于权利要求1-9任意一项所述的一种便于定位的晶圆搬运装置进行晶圆搬运的方法,其特征在于,包括:
技术总结
本发明公开了一种便于定位的晶圆搬运装置及晶圆搬运方法,其中,晶圆搬运装置包括晶圆处理组件和晶圆放置组件,其中,晶圆处理组件包括用于传输晶圆的机械臂;晶圆放置组件包括晶圆搭载底板、驱动件、定位单元和控制器,所述晶圆搭载底板中设置有晶圆放置位,所述驱动件连接所述晶圆搭载底板;所述定位单元用于检测晶圆放置位与机械臂之间的相对位置,所述控制器根据所述定位单元的检测结果控制驱动件带动晶圆搭载底板移动,直至晶圆放置位与机械臂的位置适配。本申请提供的一种便于定位的晶圆搬运装置及晶圆搬运方法,能够提高晶圆放置组件的定位精准度,提高晶圆搬运效率和搬运准确度。
技术研发人员:曹洁,张贤龙,马刚
受保护的技术使用者:上海广川科技有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!