运输装置及用于跨厂区运输的装置的制作方法
本技术涉及一种运输装置。
背景技术:
1、半导体装置的制造涉及使用各种高科技生产及计量工具以一定的次序并且通常在一定的时间周期内实行一系列工艺步骤。在晶圆制作设施或厂区(fab)中,晶圆物流系统的主要功能是在正确的时间将晶圆递送至工具中的每一者,以及在整个工艺中追踪晶圆的位置及状态。将自动化物料搬运系统(automated material handling system,amhs)应用于晶圆厂区,以与可通过人工手段进行相较更高效、一致且安全地施行自动化功能。制作工艺经常导致需要在单个厂区内进行跨阶段(cross-phase)运输及/或在厂区之间进行跨厂区(cross-fab)运输。
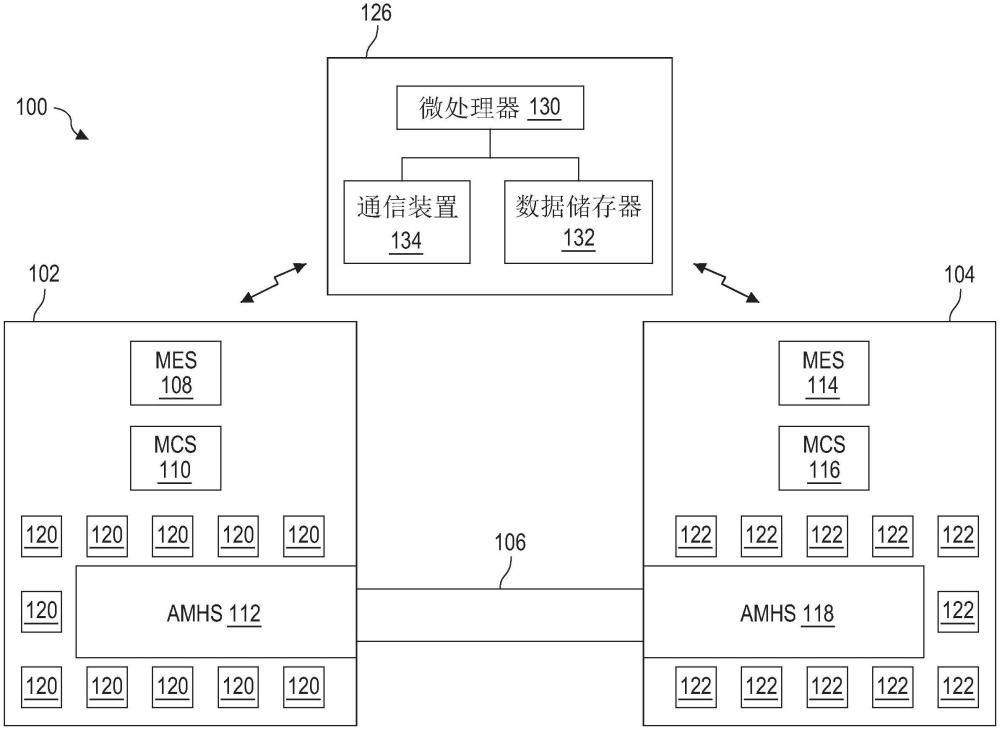
2、当将要转移晶圆载体(例如,前开式晶圆传送盒(front opening unified pod,foup)时,制造执行系统(manufacturing execution system,mes)判断晶圆载体应被转移至厂区中的哪个目的地。一旦作出了目的地决策,mes即向物料控制系统(materialcontrol system,mcs)发送转移请求,所述物料控制系统使用路线搜索引擎计算详细的运输路线并然后通知转移管理器逐步执行转移。然而,典型的mes及mcs系统仅限于单个厂区,且无法处理跨厂区及/或跨amhs运输请求。一个厂区的mes及mcs系统通常不能与单独的厂区的amhs通信。在这一点上,不同的厂区可能具有不同的amhs供货商及通信协议。尽管现有的系统及方法通常足以满足所预期的目的,然而所述系统及方法并非在所有的应用方面均令人完全满意。
3、须注意的是,“先前技术”段落的内容是用来帮助了解本实用新型。在“先前技术”段落所揭露的部分内容(或全部内容)可能不是本领域技术人员所知道的现有技术。在“先前技术”段落所揭露的内容,不代表该内容在本实用新型申请前已被本领域技术人员所知悉。
技术实现思路
1、本实用新型提供一种运输装置。
2、本实用新型的一些实施例提供一种运输装置。所述装置包括耦合至相关联的第一自动物料搬运系统(automatic material handling system,amhs)的第一控制系统。所述第一amhs包括:第一高架转移(overhead transfer,oht)轨道,包括第一部分;第一运载工具,能够沿着所述第一oht轨道移动并载运容器,所述容器能够操作以在其中载运半导体晶圆。所述系统也包括耦合至相关联的第二amhs的第二控制系统。所述第二amhs包括:第二oht轨道,包括与所述第一部分相邻的第二部分;以及第二运载工具,能够沿着所述第二oht轨道移动。在所述第一运载工具位于所述第一oht轨道的所述第一部分内且所述第二运载工具位于所述第二oht轨道的所述第二部分内的条件下,所述第一运载工具及所述第二运载工具能够操作以将所述容器直接自所述第一运载工具转移至所述第二运载工具。
3、本实用新型的一些实施例提供一种用于在两个厂区之间进行晶圆运输的装置。所述装置包括:容器,设置于第一厂区中且能够操作以载运半导体晶圆;目标设备,设置于第二厂区中;桥接区域,位于所述第一厂区与所述第二厂区之间;第一高架转移(oht)轨道,包括所述第一厂区中的第一部分及所述桥接区域中的第二部分;第一运载工具,能够操作以载运所述容器且能够沿着所述第一oht轨道移动;第二oht轨道,包括所述第二厂区中的第一部分及所述桥接区域中的第二部分,其中所述第二oht轨道的所述第二部分与所述第一oht轨道的所述第二部分平行;以及第二运载工具,被配置成沿着所述第二oht轨道移动。当所述第一运载工具及所述第二运载工具均在所述桥接区域中时,所述第二运载工具能够操作以直接自所述第一运载工具取得所述容器。
4、基于上述,本实用新型的诸实施例用以解决晶圆物流系统是否能够正确运输的问题。其技术功效在于,在整个工艺中可以有效追踪晶圆的位置及状态。将自动化物料搬运系统(automated material handling system,amhs)应用于晶圆厂区,与通过人工手段进行搬运相较更为高效、一致且安全,且可施行自动化及跨场区运输的功能。
5、为让本实用新型的上述特征和优点能更明显易懂,下文特举实施例,并配合附图作详细说明如下。
技术特征:
1.一种运输装置,其特征在于,包括:
2.根据权利要求1所述的装置,其特征在于,其中所述第一运载工具能够操作以沿着所述第一部分以第一速度移动,且所述第二运载工具能够操作以沿着所述第二部分以第二速度移动,在转移所述容器期间,所述第一速度实质上等于所述第二速度。
3.根据权利要求2所述的装置,其特征在于,其中所述第一高架转移轨道的所述第一部分与所述第二高架转移轨道的所述第二部分实质上平行,使得所述第一运载工具及所述第二运载工具能够操作以沿着相同的方向移动。
4.根据权利要求1所述的装置,其特征在于,其中所述第一部分与所述第二部分实质上处于相同的高度。
5.根据权利要求1所述的装置,其特征在于,其中所述第一运载工具包括:
6.根据权利要求1所述的装置,其特征在于,其中所述第一运载工具包括:
7.一种用于跨厂区运输的装置,其特征在于,包括:
8.根据权利要求7所述的装置,其特征在于,其中所述第一运载工具被配置成沿着所述第一高架转移轨道的所述第二部分以第一速度行进,所述第二运载工具被配置成沿着所述第二高架转移轨道的所述第二部分以第二速度行进,在取得所述容器期间,所述第一速度与所述第二速度之间的速度差小于0.1公尺/秒。
9.根据权利要求7所述的装置,其特征在于,其中所述第一运载工具包括对齐标记,所述第二运载工具包括对齐标记侦测器,且所述第二运载工具被配置成在所述对齐标记侦测器侦测到所述对齐标记之后直接自所述第一运载工具取得所述容器。
10.根据权利要求8所述的装置,其特征在于,还包括:
技术总结
本技术提供一种运输装置,包括耦合至相关联的第一自动物料搬运系统的第一控制系统。第一自动物料搬运系统包括:第一高架转移轨道,包括第一部分;第一运载工具,能够沿着第一高架转移轨道移动并载运容器,容器能够操作以在其中载运半导体晶圆。系统也包括耦合至相关联的第二自动物料搬运系统的第二控制系统。第二自动物料搬运系统包括:第二高架转移轨道,包括与第一部分相邻的第二部分;以及第二运载工具,能够沿着第二高架转移轨道移动。在第一运载工具位于第一高架转移轨道的第一部分内且第二运载工具位于第二高架转移轨道的第二部分内的条件下,第一运载工具及第二运载工具能够操作以将容器直接自第一运载工具转移至第二运载工具。
技术研发人员:徐婕,李冠群,张庆荣,董启峰
受保护的技术使用者:台湾积体电路制造股份有限公司
技术研发日:20230518
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!