一种用于无人帆船重心调节的移动电池系统的制作方法
本申请涉及帆船,具体涉及一种用于无人帆船重心调节的移动电池系统。
背景技术:
1、众所周知,帆船即利用风力前进的船,其构成主要包括船体、风帆等结构。帆船已成为现代科学研究的热点,尤其是无人帆船领域得到了众多研究者的青睐。无人帆船在海洋环境监测、远洋资源勘探等多个方面发挥着作用。
2、现有无人帆船的电池系统都是固定在船体上无法移动的固定部件,同时船体上也没有可以相对船体运动调节船体重心位置的设备。因此,无人帆船的船体重心都无法受控进行调节,无法像人工驾驶的帆船一样通过船上人员的移动调整重心的前后左右移动。人工驾驶帆船在风帆航行时,十分依赖通过船上人员位置的移动调整重心,控制船只平衡和提高转向效率。而现有无人帆船因重心无法调节,航行性能相对较差。
技术实现思路
1、为此,本申请提供一种用于无人帆船重心调节的移动电池系统,以解决现有无人帆船重心无法调节导致其航行性能差的问题。
2、为了实现上述目的,本申请提供如下技术方案:
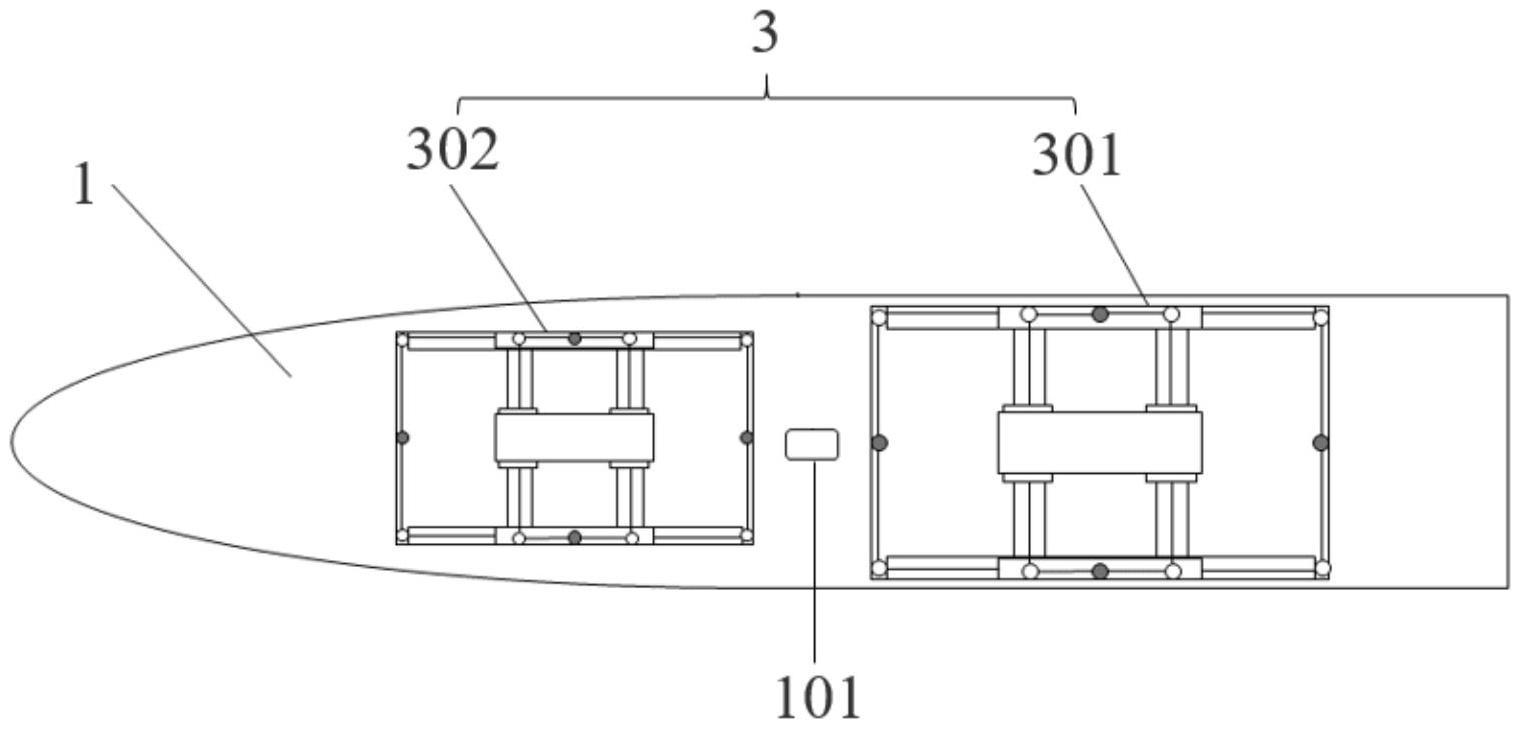
3、一种用于无人帆船重心调节的移动电池系统,包括安装于船体上的主机和多套电池系统,每套所述电池系统包括滑动组件和安装于所述滑动组件上的电池模块;
4、所述滑动组件包括前后对称的前滑动组件和后滑动组件、左右对称的左舷滑动组件和右舷滑动组件,所述前滑动组件和后滑动组件的上部设置有所述电池模块,且前滑动组件和后滑动组件的左右两端均安装于所述左舷滑动组件和右舷滑动组件上;
5、所述主机包括控制器,所述控制器用于控制所述前滑动组件、后滑动组件、左舷滑动组件和右舷滑动组件的工作。
6、可选地,多套所述电池系统沿船体的前后方向依次分布。
7、可选地,所述前滑动组件、后滑动组件分别包括前滑轨、后滑轨,设置于所述前滑轨上、后滑轨上的前滑车、后滑车,用于驱动所述前滑车、后滑车工作的左舷电机、右舷电机;
8、所述左舷滑动组件、右舷滑动组件分别包括左舷滑轨、右舷滑轨,设置于所述左舷滑轨、右舷滑轨上的左舷滑车、右舷滑车,用于驱动所述左舷滑车、右舷滑车工作的前电机、后电机;
9、所述前滑轨、后滑轨的左右两端设置于与所述左舷滑车、右舷滑车上,所述电池模块安装于所述前滑车、后滑车的上部;
10、所述控制器的第一输出端、第二输出端、第三输出端、第四输出端分别与所述左舷电机、右舷电机、前电机、后电机的输入端连接。
11、可选地,所述前滑动组件和后滑动组件还包括左舷前调节索、左舷后调节索、右舷前调节索、右舷后调节索、左舷前导缆器、左舷后导缆器、右舷前导缆器、右舷后导缆器;所述左舷电机、右舷电机通过对应输出端连接的左舷绞盘、右舷绞盘控制所述左舷前调节索、左舷后调节索、右舷前调节索、右舷后调节索的收放;所述左舷前调节索通过所述左舷前导缆器后连接在所述前滑车的左侧,所述左舷后调节索通过所述左舷后导缆器后连接在所述后滑车的左侧,所述右舷前调节索通过所述右舷前导缆器后连接在所述前滑车的右侧,所述右舷后调节索通过所述右舷后导缆器后连接在所述后滑车的右侧;
12、所述左舷滑动组件和右舷滑动组件还包括前侧左调节索、前侧右调节索、后侧左调节索、后侧右调节索、前侧左导缆器、前侧右导缆器、后侧左导缆器、后侧右导缆器,所述前电机、后电机通过对应输出端连接的前绞盘、后绞盘控制所述前侧左调节索、前侧右调节索、后侧左调节索、后侧右调节索的收放;所述前侧左调节索通过所述前侧左导缆器后连接在所述左舷滑车的前部,所述前侧右调节索通过所述前侧右导缆器后连接在所述右舷滑车的前部,所述后侧左调节索通过所述后侧左导缆器后连接在所述左舷滑车的后部,所述后侧右调节索通过所述后侧右导缆器后连接在所述右舷滑车的后部。
13、可选地,还包括设置于所述电池模块四周的多个传感器,多个所述传感器的输出端均与所述控制器的输入端连接。
14、可选地,所述传感器的输出端与所述控制器的输入端通过位置信号传输器连接。
15、可选地,多个传感器的数量有八个,八个所述传感器分别设置于所述电池模块前部左侧、前部右侧、后部左侧、后部右侧、左侧前部、左侧后部、右侧前部、右侧后部。
16、可选地,每套所述电池系统的尺寸相同或不同。
17、相比现有技术,本申请至少具有以下有益效果:
18、本申请提供了一种用于无人帆船重心调节的移动电池系统,包括安装于船体上的主机和多套电池系统,每套电池系统包括滑动组件和安装于滑动组件上的电池模块;滑动组件包括前滑动组件、后滑动组件、左舷滑动组件、右舷滑动组件;主机包括用于控制前滑动组件、后滑动组件、左舷滑动组件和右舷滑动组件工作的控制器;本申请可以根据风力和海况,通过移动电池系统的设置使得电池模块在滑动组件的驱动下能够进行前后、左右移动,使无人帆船能够像人工驾驶帆船一样调节重心的位置,提高船只航行性能。
19、本申请用于某些迎风换舷操作困难的无人帆船上时,可以在迎风换舷时通过移动电池系统的设置使得电池模块在滑动组件的驱动下能够进行前后、左右移动,通过调节无人帆船船体重心的方式降低对迎风换舷时的航速要求,提高船只安全性。
20、本申请还可以使无人帆船在大风中航行时,通过移动电池系统的设置使得电池模块在滑动组件的驱动下调整至上风舷一侧,利用电池模块的重量进行压舷减少船只侧倾,并使电池组件远离水面,确保电池组件的安全性。
技术特征:
1.一种用于无人帆船重心调节的移动电池系统,其特征在于,包括安装于船体上的主机和多套电池系统,每套所述电池系统包括滑动组件和安装于所述滑动组件上的电池模块;
2.根据权利要求1所述的用于无人帆船重心调节的移动电池系统,其特征在于,多套所述电池系统沿船体的前后方向依次分布。
3.根据权利要求2所述的用于无人帆船重心调节的移动电池系统,其特征在于,
4.根据权利要求3所述的用于无人帆船重心调节的移动电池系统,其特征在于,
5.根据权利要求1-4任一所述的用于无人帆船重心调节的移动电池系统,其特征在于,还包括设置于所述电池模块四周的多个传感器,多个所述传感器的输出端均与所述控制器的输入端连接。
6.根据权利要求5所述的用于无人帆船重心调节的移动电池系统,其特征在于,所述传感器的输出端与所述控制器的输入端通过位置信号传输器连接。
7.根据权利要求6所述的用于无人帆船重心调节的移动电池系统,其特征在于,多个传感器的数量有八个,八个所述传感器分别设置于所述电池模块前部左侧、前部右侧、后部左侧、后部右侧、左侧前部、左侧后部、右侧前部、右侧后部。
8.根据权利要求1所述的用于无人帆船重心调节的移动电池系统,其特征在于,每套所述电池系统的尺寸相同或不同。
技术总结
本申请公开了一种用于无人帆船重心调节的移动电池系统,以解决现有无人帆船重心无法调节导致其航行性能差的问题。本申请包括安装于船体上的主机和多套电池系统,每套电池系统包括滑动组件和安装于滑动组件上的电池模块;滑动组件包括前滑动组件、后滑动组件、左舷滑动组件和右舷滑动组件;主机的控制器用于控制各滑动组件的工作;本申请可以根据风力和海况,通过主机控制电池模块进行前后、左右移动,使无人帆船能够像人工驾驶帆船一样调节重心位置,在大风中航行时通过主机控制电池模块的位置进行压舷,提高船只航行性能,在迎风换舷时通过主机控制电池模块的位置调整船只重心,降低迎风换舷操作对航速的要求,提高船只的安全性。
技术研发人员:彭峣
受保护的技术使用者:李梦苑
技术研发日:20230602
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!