旋转往复驱动致动器的制作方法
[0001]
本发明涉及旋转往复驱动致动器。
背景技术:
[0002]
以往,作为旋转往复驱动致动器,已知在多功能装置、激光印刷机等中变更将激光光束反射而照射于扫描对象的镜子的反射角度的振镜马达。
[0003]
作为振镜马达,除了将线圈安装于镜子形成线圈可动构造的类型(称为“线圈可动型”)外,还已知专利文献1公开的构造等各种类型的振镜马达。
[0004]
专利文献1中公开了以下球式扫描仪,四个永久磁铁以在旋转轴径向磁化的方式设于安装有镜子的旋转轴,具有卷绕线圈而得到的磁极的铁芯以夹着旋转轴的方式配置。
[0005]
现有技术文献
[0006]
专利文献
[0007]
专利文献1:日本专利第4727509号公报
技术实现要素:
[0008]
发明所要解决的课题
[0009]
但是,在线圈可动型中,由于驱动时的线圈的发热,有可能对镜子的表面状态、镜子与旋转轴的接合状态、或者包括翘曲的镜子的形状等产生不良影响。另外,在线圈可动型中,若考虑通电时的线圈的发热,则难以使对线圈的输入电流增大,存在作为可动体的镜子的大型化、高振幅化困难的问题。进一步地,对于作为可动体的镜子,需要将至线圈的配线引出至固定体侧,存在组装性差的问题。
[0010]
另外,在专利文献1中,将磁铁配置于可动体侧,因此虽然能够消除上述的线圈可动型中的问题,但是为了使磁铁相对于铁芯静止在中立位置,也就是,使磁铁的磁极的切换部位于铁芯的中央,铁芯每一极需要两极磁铁,根据情况,需要四极磁铁。
[0011]
由此,例如,与使用两极磁铁构成同样的扫描仪的情况相比,存在可动体的振幅变小,也就是摆动范围减少的问题。另外,至少使用四个磁铁,因此,零件个数多,结构复杂,难以组装。
[0012]
鉴于这些情况,近年来,作为用于扫描仪的旋转往复驱动致动器,设想作为可动体的镜子的大型化等,期望具备刚性且具有耐冲击性、耐振动性,并且可以实现组装性的提高,且实现高振幅化的旋转往复驱动致动器。
[0013]
本发明的目的在于提供一种旋转往复驱动致动器,其制造型高,组装精度良好,而且即使可动对象为大型的镜子,也能够以高振幅驱动。
[0014]
用于解决课题的方案
[0015]
本发明的旋转往复驱动致动器具备:
[0016]
可动体,其具有供可动对象物连接的轴部及固定于上述轴部的可动磁铁;以及
[0017]
固定体,其具有线圈及供上述线圈卷绕且具有偶数的磁极的铁芯,并将上述轴部
支撑为旋转自如,
[0018]
利用通电的上述线圈与上述可动磁铁的电磁相互作用,相对于上述固定体以上述轴部为中心对上述可动体进行往复旋转驱动,其中,
[0019]
上述可动磁铁构成为呈环形状,且在上述轴部的外周使形成s极及n极的偶数的磁极交替磁化,
[0020]
上述铁芯的磁极数和上述可动磁铁的磁极数相等,
[0021]
上述铁芯的偶数的磁极在上述轴部的外周侧与上述可动磁铁隔着气隙分别对置配置,
[0022]
上述固定体具有旋转角度位置保持部,该旋转角度位置保持部与上述可动磁铁隔着气隙对置配置,并通过在与可动磁铁之间产生的磁吸引力保持上述可动磁铁的旋转角度位置。
[0023]
发明效果
[0024]
根据本发明,制造性高、组装精度良好,而且即使可动对象为大型镜子,也能够以高振幅驱动。
附图说明
[0025]
图1是本发明的实施方式1的旋转往复驱动致动器的外观立体图。
[0026]
图2是本发明的实施方式1的旋转往复驱动致动器的分解立体图。
[0027]
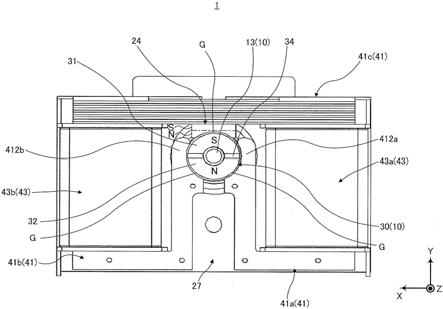
图3是表示本发明的实施方式1的旋转往复驱动致动器的主要部分结构的俯视图。
[0028]
图4是表示本发明的实施方式1的旋转往复驱动致动器的衰减部的纵剖视图。
[0029]
图5是表示本发明的实施方式1的旋转往复驱动致动器的衰减部的分解立体图。
[0030]
图6a是表示由于衰减部的功能而无瞬时振荡的波形的图,图6b是表示有瞬时振荡的波形的图。
[0031]
图7是表示衰减部的变形例的图。
[0032]
图8是表示本发明的实施方式1的旋转往复驱动致动器的由磁路引起的旋转往复驱动致动器的动作的图。
[0033]
图9是表示本发明的实施方式1的旋转往复驱动致动器的由磁路引起的旋转往复驱动致动器的动作的图。
[0034]
图10是本发明的实施方式2的旋转往复驱动致动器的外观立体图。
[0035]
图11是本发明的实施方式2的旋转往复驱动致动器的分解立体图。
[0036]
图12是本发明的实施方式3的旋转往复驱动致动器的外观立体图。
[0037]
图13是表示本发明的实施方式3的旋转往复驱动致动器的主要部分结构的纵剖视图。
[0038]
图14是本发明的实施方式4的旋转往复驱动致动器的外观立体图。
[0039]
图15是表示具有旋转往复驱动致动器的扫描系统的第一例的主要部分结构的块图。
[0040]
图16是表示具有旋转往复驱动致动器的扫描系统的第二例的主要部分结构的块图。
具体实施方式
[0041]
以下,参照附图,对本发明的实施方式详细地进行说明。
[0042]
(实施方式1)
[0043]
以下,对于构成本实施方式的旋转往复驱动致动器1的各部,以旋转往复驱动致动器1未驱动,为非动作状态的通常状态时为基准进行说明。另外,说明本实施方式的旋转往复驱动致动器1的构造时,使用正交坐标系(x,y,z)。在后述的图中,也用共通的正交坐标系(x,y,z)表示。此外,轴向除z方向还包括-z方向。
[0044]
图1是本发明的实施方式1的旋转往复驱动致动器1的外观立体图,图2是本发明的实施方式1的旋转往复驱动致动器1的分解立体图,图3是表示本发明的实施方式1的旋转往复驱动致动器1的主要部分结构的俯视图。
[0045]
旋转往复驱动致动器1使连接有可动对象物的可动体10绕轴部13往复旋转驱动。旋转往复驱动致动器1例如在可动体10具备作为可动对象物的镜子16,在激光雷达(“光检测和测距”雷达:laser imaging detection and ranging)等中作为利用镜子16将激光光束照射至扫描对象,并取得其反射光而取得扫描对象的信息的光扫描仪使用。此外,旋转往复驱动致动器1可以应用于多功能装置、激光印刷机等扫描装置。特别地,旋转往复驱动致动器1在受到外力的状况下也能够合适地发挥功能,优选适用于存在行驶时受到冲击的可能性的装置,例如,可车载的扫描仪装置。
[0046]
旋转往复驱动致动器1具有:具有可动磁铁30及轴部13的可动体10;以及固定体20,其将轴部13支撑为旋转自如,且具有线圈43以及可动磁铁30的旋转角度位置保持部(以下,称为“磁铁位置保持部”)24。
[0047]
在旋转往复驱动致动器1中,通过磁铁位置保持部24与可动磁铁30的磁吸引力、所谓的磁力弹簧,在常态时,可动体10以位于动作基准位置的方式被保持为转动自如。在此,常态时是对线圈43不通电的状态。可动体10位于动作基准位置是指在本实施方式中可动磁铁30相对于线圈43的励磁的磁极412a、412b位于中立的位置,是可以向绕轴的一方向和另一方向(从轴部13侧观察时正转及倒转)双方的任一个方向均进行同样的旋转的位置。可动体10位于动作基准位置时,在可动磁铁30中作为磁极切换的部位的磁极的切换部(称为“磁极切换部”)34位于与线圈43侧的磁极对置的位置。磁极切换部34在可动磁铁30的外周部分设于两处。动作基准位置是可动磁铁30以轴部13为中心旋转往复驱动时,右转左转可以以同样的扭矩旋转的位置。
[0048]
通过可动磁铁30与线圈43的协动,可动体10的轴部13相对于固定体20从动作基准位置向绕轴的一方向和另一方向适当移动,在本实施方式中,往复旋转驱动、也就是摆动或振动。
[0049]
[可动体10]
[0050]
可动体10除了轴部13、固定于轴部13的可动磁铁30外,还具有后述的旋转角度位置检测部70的编码器盘72,在轴部13经由镜架15固定有镜子16。镜子16将作为射入的光的激光光束反射而射出,进行扫描。此外,在本实施方式的可动体10中,安装有镜子16,可以使镜子作为可动对象物绕轴部13往复旋转振动,但可动对象物当然也可以不是镜子。
[0051]
轴部13绕轴旋转自如地支撑于固定体20。轴部13只要活动自如地轴支承于固定体20,可以被任意地轴支承,在本实施方式中,经由轴承23a、23b轴支承。
[0052]
轴部13由具有耐久性的金属(例如,sus420j2)等形成,连接于可动对象。可动对象是成为往复旋转驱动对象的部件,也可以是可动体10本身。
[0053]
轴部13在沿轴向分离的位置经由轴承23a、23b被固定体20轴支承。在轴承23a、23b之间的部位(在此为中央部分)经由镜架15固定有作为可动对象的镜子16。另外,若关注于轴承23a的位置,则轴承23a在轴部13配置于可动磁铁30与作为可动对象物的镜子16之间。
[0054]
此外,镜子16安装成使反射面16a位于轴部13的切线方向,通过轴部13的旋转,反射面16a的角度变更自如。
[0055]
安装于轴部13的镜子16也可以在轴部13的全长中安装于靠近两端部13a、13b中一方侧的位置(进行了变化的位置)。该情况下,优选在轴部13的另一端部13b侧经由轴承232、234(参照图12及图13的旋转往复驱动致动器1b)轴支承于固定体20b。
[0056]
本实施方式中,轴部13以夹着镜子16的方式在两端部13a、13b侧经由轴承23a、23b轴支承于基座22。由此,构成为,镜子16的保持比通过单臂支撑来固定的情况更牢固,耐冲击性、耐振动提高。
[0057]
另外,本实施方式中,在轴部13的一端部13a固定有可动磁铁30,在另一端部13b连接有作为衰减部的一例的安装于固定体20的衰减器60。
[0058]
可动磁铁30在轴部13的外周沿与轴部13的旋转轴方向正交的方向具有以s极及n极交替磁化的偶数的磁极。可动磁铁30在本实施方式中磁化为两极,但根据活动时的振幅,也可以进行两极以上磁化。
[0059]
可动磁铁30形成环形。在可动磁铁30中,在轴部13的外周,形成s极及n极的偶数的磁极31、32交替磁化。
[0060]
本实施方式中,可动磁铁30具备夹着轴部13彼此朝向相反侧且分别具有不同的极性的磁化面的偶数的磁极31、32。在本实施方式中,磁极31、32以沿着轴部13的轴向的平面为边界为不同的极性。
[0061]
另外,这些偶数的磁极31、32在可动磁铁30中通过在轴部13的外周等间隔磁化而构成。
[0062]
这样,在可动磁铁30中,在轴部13的外周交替配置有形成s极及n极的偶数的磁极31、32。而且各个磁极31、32等间隔配置。
[0063]
如图3所示,俯视下,可动磁铁30构成有各自半圆状的部位不同的磁极31、32。本实施方式的可动磁铁30中,半圆状的部位的圆弧状的弯曲面为不同的磁极31、32的磁化面,且构成为绕轴在周向上延伸。换言之,磁极31、32的磁化面在与轴部13的轴向正交的方向排列,并且配置成通过旋转能够分别与第一铁芯41a、第二铁芯41b的磁极412a、412b对置。
[0064]
可动磁铁30的磁极数与铁芯的磁极数相等。
[0065]
可动磁铁30的外周面上的磁极31、32的切换在沿轴部13的延伸方向的磁极切换部34切换。
[0066]
可动磁铁30的磁极31、32的磁极切换部34在对线圈43未通电时位于与第一铁芯41a、第二铁芯41b的磁极412a、412b的宽度方向的中心位置对置的位置。磁极切换部34配置于相对于磁极412a、412b的每一个,成为旋转方向上的区域对称的位置。
[0067]
可动磁铁30通过轴部13的旋转,磁极31、32及磁极切换部34绕轴在周向上移动自如。
[0068]
[固定体20]
[0069]
固定体20轴支承轴部13而活动自如地支撑可动体10。
[0070]
固定体20具有基座22、轴承23a、23b、磁铁位置保持部24、铁芯固定板27、具有线圈43的铁芯单元40。
[0071]
基座22在旋转往复驱动致动器1中旋转自如地轴支承可动体10的轴部13。在本实施方式中,基座22形成如下形状:将在轴部13的轴向、也就是z方向上分离且对置配置的一端面部222及另一端面部224各自的一边部(在此,-y方向侧的一端部)侧在沿轴向延伸的主体面部226的两端部接合。具体而言,基座22具有以下形状:一端面部222、另一端面部224以及主体面部226分别形成为面状,主体面部226从在轴部13的轴向上分离的两端部分别以使一端面部222及另一端面部224对置的方式突出设置。即,基座22整体形成为侧视大致u字状。
[0072]
在沿轴向分离的一端面部222及另一端面部224分别对置地具有沿轴向(z方向)贯通的缺口孔222a、224a。在这些缺口孔222a、224a分别经由轴承23a、23b插通有轴部13。
[0073]
在一端面部222与另一端面部224之间转动自如地配置有镜子16,镜子16在基座22内转动自如。
[0074]
在基座22的一端面部222的轴向外方的外表面(在此为左面)侧配置有与可动磁铁30隔着气隙g对置的铁芯单元40。
[0075]
铁芯单元40固定于铁芯固定板27,铁芯固定板27经由固定件28固定于一端面部222的左面侧。
[0076]
在另一端面部224侧配置有检测轴部13的旋转角度的旋转角度位置检测部70。本实施方式中的旋转角度位置检测部70为所谓的光编码器传感器,具有安装于轴部13的编码器盘72和安装有使用编码器盘72检测轴部13的旋转角度的光学传感器74的传感器用基板76。
[0077]
在另一端面部224配置有安装光学传感器74的传感器用基板76。本实施方式中,传感器用基板76通过螺丝等固定件28固定于另一端面部224。旋转角度位置检测部70通过利用光学传感器74接受从编码器盘72反射的光检测轴部13的旋转角度、也就是镜子16的旋转角度。由此,能够使用检测结果,通过例如设于固定体20侧的控制部控制轴部13及镜子16往复旋转驱动(摆动)时的摆动范围。
[0078]
铁芯单元40具有线圈43和包括供线圈43卷绕的第一铁芯41a、第二铁芯41b以及架设铁芯41c的铁芯41。
[0079]
本实施方式中,在铁芯单元40的架设铁芯41c设有磁铁位置保持部24。
[0080]
线圈43通过通电而将铁芯励磁。在本实施方式中,线圈43由线圈43a、43b构成,且分别卷绕于骨架44。骨架44外插于第一铁芯41a的芯部411a、第二铁芯41b的芯部411b。
[0081]
这样,线圈43a、43b在配置于夹着可动磁铁30的位置的铁芯双方各配置一个,因此能够将线圈43尺寸小型化,另外,能够实现通过线圈43产生的磁力平衡的提高。
[0082]
第一铁芯41a、第二铁芯41b以及架设铁芯41c分别为层叠铁芯,例如,层叠铁素体类磁性不锈钢钢板而成。
[0083]
第一铁芯41a、第二铁芯41b具有通过线圈43被通电而励磁的偶数(在此为两个)个不同的磁极412a、412b。此外,铁芯41的磁极的数量只要是偶数,是与可动磁铁30的磁极31、
32相同的数量,也可以为具有两个以上的结构。
[0084]
在本实施方式中,第一铁芯41a、第二铁芯41b具有以在与旋转轴方向正交的方向上夹着可动磁铁30的方式且在与旋转轴方向正交的方向上平行地配置的芯部(411a、411b)。在芯部(411a、411b)分别外插有卷绕有线圈43的骨架44。在芯部(411a、411b)的一方的端部间架设有架设铁芯41c,在芯部(411a、411b)的另一方的端部连续地形成有磁极412a、412b。
[0085]
两个磁极412a、412b以在可动磁铁30的旋转方向上排列的方式配置。
[0086]
在本实施方式中,两个磁极412a、412b从可动磁铁30的外周(相当于磁极31、32)在可动磁铁30的与旋转轴正交的方向上隔着气隙g以夹着可动磁铁30的方式对置配置。
[0087]
在磁极412a、412b的每一个,沿可动磁铁30的旋转方向的长度的中心(以下,分别称为磁极412a、412b的“中心位置”)彼此夹着轴部的轴对置。
[0088]
相对于磁极412a、412b的中心位置的每一个,对置地配置可动磁铁30的磁极切换部34。本实施方式中,磁极412a、412b的中心位置和轴部13的轴在俯视下配置于同一直线上。
[0089]
在本实施方式中,磁极412a、412b与可动磁铁30的外周面对应地形成为圆弧状,且配置成在x方向上包围可动磁铁30。
[0090]
架设铁芯41c配置成与第一铁芯41a、第二铁芯41b一起将可动磁铁30在与旋转轴正交的方向上包围。
[0091]
在架设铁芯41c向可动磁铁30侧突出地安装有与可动磁铁30隔开气隙g对置配置的磁铁位置保持部24。
[0092]
磁铁位置保持部24通过在与可动磁铁30之间产生的磁吸引力与可动磁铁30一起作为磁力弹簧发挥功能,保持旋转的可动磁铁30的位置位于动作基准位置(预定的旋转角度位置)。
[0093]
磁铁位置保持部24是磁铁或磁性体。在本实施方式中,磁铁位置保持部24是朝向可动磁铁30侧磁化的磁铁,与由磁性体构成的情况相比,增加了与可动磁铁30之间的磁吸引力。在本实施方式中,应用了将可动磁铁30侧作为磁化方向的磁铁。
[0094]
磁铁位置保持部24是磁铁,在本实施方式中,在动作基准位置使可动磁铁30的磁极切换部34位于与磁极412a、412b对置的位置。这样,磁铁位置保持部24与可动磁铁30互相吸引,能够使可动磁铁30位于动作基准位置。由此,可动磁铁30的磁极切换部34与第一铁芯41a、第二铁芯41b的磁极412a、412b的中心位置对置。由此,可动磁铁30稳定在动作基准位置,并且在该位置,对线圈43(43a、43b)通电,能够产生最大扭矩来驱动可动体10。
[0095]
另外,可动磁铁30进行两极磁化,因此通过与线圈43的协动,容易提高振幅,能够实现振动性能的提高。
[0096]
磁铁位置保持部24在可动磁铁30的外周面具有隔开气隙g对置的对置面。对置面为与可动磁铁30的外周面的形状对应的弯曲面。
[0097]
磁铁位置保持部24形成为从架设铁芯41c朝向可动磁铁30突出的凸状,且将其前端面形成为对置面。
[0098]
磁铁位置保持部24例如是将对置面磁化为n极(参照图8及图9)的磁铁。
[0099]
磁铁位置保持部24的成为磁极的对置面相对于可动磁铁30的沿着旋转方向的部
位且与第一铁芯41a、第二铁芯41b的磁极412a、412b对置的可动磁铁30的外周面的部位之间的部位,在可动磁铁30的径向外侧对置。
[0100]
在将磁铁位置保持部24设为磁性体的情况下,也可以一体形成于架设铁芯41c。由此,能够以较少的零件个数合适地实现作为磁力弹簧的功能。
[0101]
就动作基准位置处的可动磁铁30而言,可动磁铁30的磁极的一方与磁铁位置保持部24对置,可动磁铁30的磁极的磁极切换部34与第一铁芯41a、第二铁芯41b的磁极412a、412b的中心位置对置。
[0102]
本实施方式中,将线圈43励磁的铁芯41由具有磁极412a的第一铁芯41a、具有磁极412b的第二铁芯41b以及架设于第一铁芯41a及第二铁芯41b的与各磁极412a、412b侧相反的一侧的端部间的架设铁芯41c构成。即,铁芯41由三个分割体构成。在这些分割体中的架设铁芯41c设有磁铁位置保持部24。于是,在铁芯41中,将配置磁铁位置保持部24的铁芯部分设为单体,因此,与将磁铁位置保持部24在包括卷绕线圈43的部分的铁芯一体构成的情况相比,容易进行线圈43、铁芯41、可动磁铁30的相互的组装,能够实现组装性的提高。
[0103]
图4是表示本发明的实施方式1的旋转往复驱动致动器的衰减部的纵剖视图,图5是表示本发明的实施方式1的旋转往复驱动致动器的衰减器的分解立体图。
[0104]
在通过线圈43通电而可动体10往复旋转驱动时,在产生强烈的共振的情况下,衰减部使该强烈的共振衰减。在本实施方式中,作为衰减部,衰减器60设于轴部13与基座22之间,通过对轴部13的旋转施加载荷,使共振衰减。
[0105]
衰减器60例如具有固定于基座22的壳体62、磁铁63、在壳体62内回转自如地配置且固定于轴部13的旋转体64、上盖部65、以及下盖部66。
[0106]
壳体62是筒状体,在内周面沿周向安装有环状的磁铁63。在磁铁63的内侧隔开气隙g2配置有旋转体64。
[0107]
旋转体64为磁性体,具有圆盘部641、从圆盘部641的中央突出的凹部642、以及从圆盘部641的外缘侧突出且在凹部642的外周侧以同心圆状配置的外筒部644。轴部13的另一端部13b插入并且固定于旋转体64的凹部642内。外筒部644在磁铁63与上盖部65的内筒部652之间沿周向移动自如地配置于壳体62内。
[0108]
壳体62的下表面侧被下盖部66堵塞,壳体62的上表面侧以旋转体64不会从壳体62脱落的方式且以使设于旋转体64的中央的凹部642的开口端露出的状态,由环状的上盖部65堵塞。衰减器60在壳体62的上表面侧的凸缘经由螺钉等固定件29(参照图2)固定于另一端面部224。在本实施方式中,壳体62经由固定件29固定于在另一端面部224上向外表面侧突出的未图示的凸起部,衰减器60配置为在与另一端面部224之间夹着旋转角度位置检测部70。
[0109]
在壳体62内,在磁铁63与旋转体64之间、和上盖部65的内筒部652与旋转体64之间填充有磁性流体r。
[0110]
在可动体10往复旋转驱动时,衰减器60通过固定于轴部13的另一端部13b的旋转体64在壳体62内与磁性流体r接触,利用磁铁63的磁吸引力通过磁性流体r赋予负载,并且往复旋转驱动。由此,抑制在可动体10运动时共振强烈的情况下产生的图6b所示的瞬时振荡,如图6a所示地以不存在瞬时振荡且合适的波形、所谓的锯齿波驱动,能够实现容易控制的振动。另外,本实施方式的衰减器60采用了使磁性流体r介于旋转体64与壳体62侧之间的
结构,磁性流体r由于磁铁63而不会向衰减器60的外部泄漏,能够实现作为衰减器60的可靠性的提高。
[0111]
此外,在本实施方式的旋转往复驱动致动器1中,作为衰减部的衰减器60采用了所谓的使磁性流体r介于旋转体64与作为固定体侧的壳体62之间的旋转阻尼器,但也可以更换磁性流体r而为使旋转体64相对于壳体62的旋转力衰减的流体。即,衰减器60只要使连接于可动体10的旋转体64的旋转衰减,并使可动体10往复旋转驱动时产生的强烈的共振衰减,就可以为任意的结构。
[0112]
例如,也可以构成为,在衰减器60的结构中,卸除磁铁63,通过密封环等提高壳体62、上盖部65以及下盖部66之间的密闭型,取代磁性流体r而使用油。
[0113]
根据该结构,在衰减器60中,不需要磁铁63,能够实现衰减器本身的小型化,并且能够实现组装性的提高。
[0114]
另外,也可以将衰减部设为磁性流体本身,配置于可动磁铁30与磁极412a、412b之间的气隙g、可动磁铁30与磁铁位置保持部24之间的气隙g。根据该结构,无需将本实施方式的衰减器60这样的旋转阻尼器用作独立部件。另外,通过将磁性流体涂布于可动磁铁30和磁极412a、412b各自的夹着气隙g的部位、可动磁铁30和磁铁位置保持部24各自的夹着气隙g的部位,在这些气隙g间容易配置磁性流体,能够以低成本且节约空间地实现使共振衰减的衰减功能。
[0115]
另外,也可以是,作为衰减部,例如,如图7所示,在对旋转往复驱动致动器1供给驱动信号的电源供给部(驱动信号供给部77)与旋转往复驱动致动器1之间设置低通滤波器、带阻滤波器、或者陷波滤波器等电滤波器78,去除瞬时振荡产生的频率成分。此外,电滤波器78安装于驱动线圈43的未图示的驱动基板,驱动基板设于固定体20。
[0116]
设置电滤波器78,使共振衰减,从而与机械性的衰减构造相比,不会受温度的影响或者受构成部件的个体差等的影响,能够适当地抑制瞬时振荡。
[0117]
[旋转往复驱动致动器1的磁路结构]
[0118]
图8及图9是表示本发明的实施方式1的旋转往复驱动致动器的由磁路而引起的旋转往复驱动致动器的动作的图,图9表示在图8中将对线圈的通电方向设为反方向的情况下的旋转往复驱动致动器的动作。
[0119]
旋转往复驱动致动器1中,在对线圈43未通电时,可动磁铁30通过磁铁位置保持部24与可动磁铁30的磁吸引力、也就是磁弹簧而位于动作基准位置(预定的旋转角度位置)。
[0120]
常态下,也就是,在动作基准位置下,可动磁铁30的磁极31、32的一方被磁铁位置保持部24吸引,磁极切换部34位于与第一铁芯41a、第二铁芯41b的磁极412a、412b的中心位置对置的位置。
[0121]
如图8所示,例如,在磁铁位置保持部24为将与可动磁铁30对置的对置面磁化为n极的结构中,以与被可动磁铁30的s极磁化的磁极32互相吸引的方式,产生将可动磁铁30旋转的磁力弹簧扭矩(图8中用箭头fm表示)。
[0122]
这样,在本实施方式的旋转往复驱动致动器1中,在常态时,也就是在可动磁铁30位于动作基准位置的情况下,可动磁铁30的磁极切换部34(详细而言,线状的磁极切换部34的两端部)配置于朝向第一铁芯41a、第二铁芯41b的磁极412a、412b的位置。由此,在线圈43被通电时,通过与线圈43的通电方向相应的线圈43的励磁,能够以期望的旋转方向驱动可
动体10,另外,能够实现旋转驱动可动体10的扭矩的最大化。
[0123]
线圈43卷绕成,当对线圈43通电时,线圈43(43a、43b)将第一铁芯41a、第二铁芯41b励磁,使第一铁芯41a、第二铁芯41b的磁极412a、412b分别为不同的极性。
[0124]
在本实施方式中,当以图8所示的方向对线圈43(43a、43b)通电时,线圈43(43a、43b)将第一铁芯41a、第二铁芯41b励磁,磁极412a被磁化成n极,磁极412b被磁化成s极。
[0125]
详细而言,通电的线圈43a、43b将各自卷绕的芯部(411a、411b)磁化。在第一铁芯41a中,例如形成如下磁通:从作为n极的磁极412a向可动磁铁30射出,依次流通于可动磁铁30、磁铁旋转位置保持部24、架设铁芯41c,并射入芯部411a。
[0126]
另外,在第二铁芯41b中,形成如下磁通:从芯部411b向架设铁芯41c侧射出,依次流通于架设铁芯41c、磁铁旋转位置保持部24、可动磁铁30,并射入磁极412b。
[0127]
由此,被磁化成n极的磁极412a与可动磁铁30的s极吸引,被磁化成s极的磁极412b与可动磁铁30的n极吸引,在可动磁铁30产生绕轴部13的轴的f方向的扭矩,可动磁铁30沿f方向旋转。随之,轴部13也旋转,固定于轴部13的镜子16也旋转。
[0128]
另外,当线圈43的通电方向切换到反方向时,被线圈43励磁的第一铁芯41a、第二铁芯41b中,磁极412a、412b被磁化为以与先前的对线圈43的通电方向的情况不同的磁极。具体而言,当以与图8所示的通电方向不同的方向通电(参照图9)时,磁极412a被磁化成s极,磁极412b被磁化成n极,磁通的流动也颠倒。在切换通电方向时,由于磁铁旋转位置保持部24与可动磁铁30之间的磁吸引力、也就是磁力弹簧而产生磁力弹簧扭矩fm,可动磁铁30向动作基准位置移动。
[0129]
由此,如图9所示,被磁化成s极的磁极412a与可动磁铁30的n极吸引,被磁化成n极的磁极412b与可动磁铁30的s极吸引,在可动磁铁30产生与绕轴部13的轴的f方向相反的方向的扭矩,可动磁铁30沿与f方向相反的方向(-f方向)旋转。随之,轴部13也沿反方向(-f方向)旋转移动,固定于轴部13的镜子16也沿与先前的移动方向相反的方向(-f方向)旋转。通过反复进行该操作,镜子16往复旋转驱动。
[0130]
这样,旋转往复驱动致动器1被从电源供给部(例如,具有与图7的驱动信号供给部77同样的功能的电源供给部)向线圈43输入的交流波驱动。也就是,线圈43的通电方向周期性切换,在可动体10交替作用由绕轴的f方向的扭矩引起的f方向的推力和由与f方向相反的方向(-f方向)的扭矩引起的推力。由此,可动体10以轴部13为中心往复旋转驱动、也就是振动。此外,在对可动体10交替作用由f方向的扭矩及-f方向的扭矩引起的推力时的切换时,可动体10向动作基准位置的移动作用磁力弹簧扭矩fm、-fm。
[0131]
以下,对旋转往复驱动致动器1的驱动原理简单地进行说明。本实施方式的旋转往复驱动致动器1中,在将可动体10的惯性力矩设为j[kg
·
m
2
]、且将磁弹簧(磁极412a、412b、磁铁位置保持部24以及可动磁铁30)的扭转方向的弹簧常数设为k
sp
的情况下,可动体10相对于固定体20以通过下式(1)算出的共振频率fr[hz]振动。
[0132]
[式1]
[0133][0134]
fr:共振频率[hz]
[0135]
j:惯性力矩[kg
·
m
2
]
[0136]
k
sp
:弹簧常数[n
·
m/rad]
[0137]
可动体10构成弹簧-质量系的振动模型的质量部,因此,当对线圈43输入与可动体10的共振频率fr相等的频率的交流波时,可动体10为共振状态。即,通过从电源供给部对线圈43输入与可动体10的共振频率fr大致相等的频率的交流波,能够使可动体10效率良好地振动。
[0138]
以下示出表示旋转往复驱动致动器1的驱动原理的运动方程式及回路方程式。旋转往复驱动致动器1基于下式(2)表示的运动方程式及下式(3)表示的回路方程式驱动。
[0139]
[式2]
[0140][0141]
j:惯性力矩[kg
·
m
2
]
[0142]
θ(t):角度[rad]
[0143]
k
t
:扭矩常数[n
·
m/a]
[0144]
i(t):电流[a]
[0145]
k
sp
:弹簧常数[n
·
m/rad]
[0146]
d:衰减系数[n
·
m/(rad/s)]
[0147]
t
loss
:载荷扭矩[n
·
m]
[0148]
[式3]
[0149][0150]
e(t):电压[v]
[0151]
r:电阻[ω]
[0152]
l:电感[h]
[0153]
k
e
:反电动势常数[v/(rad/s)]
[0154]
即,旋转往复驱动致动器1的可动体10的惯性力矩j[kg
·
m
2
]、旋转角度θ(t)[rad]、扭矩常数k
t
[n
·
m/a]、电流i(t)[a]、弹簧常数k
sp
[n
·
m/rad]、衰减系数d[n
·
m/(rad/s)]、载荷扭矩t
loss
[n
·
m]等能够在满足式(2)的范围内适当变更。另外,电压e(t)[v]、电阻r[ω]、电感l[h]、反电动势常数k
e
[v/(rad/s)]能够在满足式(3)的范围内适当变更。
[0155]
这样,在旋转往复驱动致动器1中,在通过与由可动体10的惯性力矩j和磁弹簧的弹簧常数k
sp
决定的共振频率fr对应的交流波进行对线圈43的通电的情况下,能够有效地得到大的振动输出。
[0156]
根据本实施方式的旋转往复驱动致动器,扭矩的产生效率高,热量难以传递至作为可动对象的镜子,能够确保镜子16的反射面16a的平面度的精度。另外,制造性高,组装精度良好,即使可动对象为大型镜子,也能够以高振幅驱动。
[0157]
此外,实施方式1的旋转往复驱动致动器1及后述的旋转往复驱动致动器1a、1b、1c可以进行共振驱动,但也可以进行非共振驱动。另外,通过使用衰减部使衰减系数增大,也可以抑制瞬时振荡。
[0158]
(实施方式2)
[0159]
图10是本发明的实施方式2的旋转往复驱动致动器1a的外观立体图,图11是本发明的实施方式2的旋转往复驱动致动器1a的分解立体图。
[0160]
图10及图11所示的旋转往复驱动致动器1a在旋转往复驱动致动器1的结构中采用了更换作为旋转角度位置检测部70的光学传感器而使用磁传感器的结构,其它结构与旋转往复驱动致动器1相同。由此,在旋转往复驱动致动器1a的说明中,对于与旋转往复驱动致动器1相同的结构要素,标注相同的名称及相同的符号,省略说明。
[0161]
旋转往复驱动致动器1a具有:具有可动磁铁30a及轴部13a的可动体10a;以及固定体20a,其将轴部13a支撑为旋转自如,且具有线圈43及磁铁位置保持部24。旋转往复驱动致动器1a中,可动体10a的可动磁铁30a形成环形状,在轴部13a的外周交替磁化形成s极及n极的偶数的磁极而构成。固定体20a的铁芯41的两个偶数的磁极412a、412b与可动磁铁30a在轴部13a的外周侧隔着气隙g分别对置配置。另外,铁芯41的磁极数和可动磁铁30a的磁极数相等。
[0162]
在旋转往复驱动致动器1a中,通过磁铁位置保持部24与可动磁铁30a的磁吸引力、所谓的磁力弹簧,在常态时,可动体10a以位于动作基准位置的方式转动自如地保持于固定体20a。在此,常态时是对线圈43未通电的状态。可动体10a位于动作基准位置的状态是可动磁铁30a相对于线圈43的励磁的磁极位于中立的位置的状态,是可动磁铁30a的磁极切换部34与线圈43侧的磁极对置的位置。
[0163]
可动体10a除了轴部13a、固定于轴部13a的可动磁铁30a外,还具有被旋转角度位置检测部70a的磁传感器74a感测的磁传感器用磁铁72a。
[0164]
在轴部13a经由镜架15a固定有镜子16。
[0165]
固定体20a具备基座22a、轴承23a、23b、磁铁位置保持部24、铁芯固定板27a、以及具有线圈43的铁芯单元40。
[0166]
基座22a具有将在轴向(z方向)上分离对置配置的一端面部222a及另一端面部224a通过沿轴向延伸的主体面部226a接合的形状。此外,在基座22a的一端面部222a经由螺丝等固定件28a固定有固定铁芯单元40的铁芯固定板27a。
[0167]
在基座22a中,在一端面部222a及另一端面部224a的切口部嵌入有轴承23a、23b。在轴承23a、23b插通有轴部13a,轴部13a经由轴承23a、23b转动自如地支撑于基座22a。
[0168]
另一端面部224a在轴向外侧将轴部13a支撑为转动自如。
[0169]
在另一端面部224a的轴向外侧配置有旋转角度位置检测部70a。
[0170]
旋转角度位置検出部70a具有磁传感器用磁铁72a、磁传感器74a、安装磁传感器74a的传感器用基板76a。
[0171]
磁传感器用磁铁72a经由保持件73a一体地固定于从另一端面部224a向轴向外方突出的轴部13a的另一端部13b的端面。
[0172]
磁传感器74a通过驱动而感测与轴部13a一起旋转的磁传感器用磁铁72a,检测轴部13a、进而检测镜子16的旋转角度。传感器用基板76a经由螺丝等固定件28a固定于固定部件75a。固定部件75a经由螺丝等固定件29a固定于另一端面部224a。由此,磁传感器74a在另一端面部224a配置于与磁传感器用磁铁72a在轴向上对置的位置。传感器用基板76a可以驱动磁传感器74a,将由磁传感器74a取得的轴部13a的旋转角度、也就是与旋转角度对应的位
置反馈到电源供给部(例如,具有与图7的驱动信号供给部77相同的功能的电源供给部)。
[0173]
在本实施方式中,能够起到与旋转往复驱动致动器1同样的基本的作用效果,并且相比使用了光学传感器的情况,构造更简单,另外,能够实现产品成本的降低。
[0174]
(实施方式3)
[0175]
图12是本发明的实施方式3的旋转往复驱动致动器1b的外观立体图,图13是表示本发明的实施方式3的旋转往复驱动致动器1b的主要部分结构的纵剖视图。
[0176]
图12及图13所示的旋转往复驱动致动器1b具有与旋转往复驱动致动器1同样的磁路结构,将镜子16b固定于轴部13b的一端部侧,并在轴部13b的另一端部13b侧由基座22b轴支承。此外,在旋转往复驱动致动器1b中,可动体10b的环形状的可动磁铁30也通过在轴部13b的外周交替磁化形成s极及n极的偶数的磁极而构成,固定体20b的两个偶数的磁极412a、412b与可动磁铁30的磁极数相等,且在轴部13b的外周侧隔着气隙g与可动磁铁30分别对置配置。
[0177]
旋转往复驱动致动器1b将镜子16b通过所谓的枢轴构造可往复旋转驱动地构成。
[0178]
具体而言,在具有轴部13b和固定于轴部13b的可动磁铁30的可动体10b中,在轴部13b固定有编码器盘72和扫描用的镜子16b。扫描用的镜子16b经由镜架15b固定于轴部13b。
[0179]
在具有铁芯单元40的固定体20b中,在形成于基座22b的贯通部相邻地嵌入有轴承232、234,轴部13b插通于该轴承232、234。
[0180]
基座22b是配置于xy平面上的板状的基座,在基座22b的一端面侧(左侧面侧)经由铁芯固定板27固定有铁芯单元40。
[0181]
在基座22b的另一端面(右侧面)、也就是在基座部22b的与设有铁芯单元40的面相反的一侧的面配置有旋转角度位置检测部70。在基座22b的另一端面(右侧面)侧配置有安装于轴部13b的编码器盘72和传感器用基板76,可以通过与编码器盘72对置的光学传感器74检测轴部13b的旋转角度。另外,在基座22b的右侧面侧设有位于比旋转角度位置检测部70靠右侧的衰减器60。
[0182]
在与实施方式1同样的衰减器60的旋转体64(参照图6及图7)经由轴承232、234接合有插通基座22b的轴部13b的另一端部13b。
[0183]
这样,在旋转往复驱动致动器1b中,轴部13b在一端部侧固定镜子16b,在另一端部侧可往复旋转地支撑于基座22b。在基座22b侧,在轴部13b上,在基座22b的一端面侧固定有可动磁铁30,且隔着轴承234、232,在基座22b的另一端面侧固定有旋转角度位置检测部70的编码器盘72、衰减器60的旋转体。
[0184]
编码器盘72与轴承234相邻配置,旋转往复驱动致动器1b能够使固定于镜子16b的轴部13b的长度比实施方式1的旋转往复驱动致动器1的轴部13短,并使镜子16b往复旋转驱动。
[0185]
旋转往复驱动致动器1b在轴部13b的一端部13a侧固定镜子16b,且在轴部13b的另一端部13b侧由两个轴承232、234轴支承。由此,能够使沿轴部13b配置的镜子16b、可动磁铁30、轴承232、234分别依次相邻配置,相比将轴承232、234分离配置的结构,能够将旋转往复驱动致动器1b本身小型化。旋转往复驱动致动器1b与旋转往复驱动致动器1同样地,扭矩的产生效率高,热量难以传递至作为可动对象的镜子,能够确保镜子16b的反射面的平面度的精度。另外,制造性高,组装精度良好,且能够以高振幅驱动镜子16b。
[0186]
(实施方式4)
[0187]
图14是本发明的实施方式4的旋转往复驱动致动器的外观立体图。
[0188]
图14表示的旋转往复驱动致动器1c具有与旋转往复驱动致动器1同样的磁路结构,在与旋转往复驱动致动器1相同的结构中,取代在一个轴向驱动的镜子16而应用了在两个轴向驱动的镜子16c。由此,在旋转往复驱动致动器1c中,对与旋转往复驱动致动器1同样的结构要素标注相同符号相同名称,省略说明。
[0189]
在旋转往复驱动致动器1c中,设置成,通过包括使用了电磁相互作用的铁芯单元40及可动磁铁30的驱动源,具有在两个轴上往复旋转驱动的反射镜部162的镜子16c能够在与轴部13的轴向正交的方向上往复旋转驱动。
[0190]
镜子16c包括将镜子16c的反射镜部162相对于轴部13在与轴部13的旋转方向正交的方向上驱动的额外驱动部。
[0191]
具有额外驱动部的镜子16c例如是mems(micro electro mechanical system)镜,例如,构成为能够基于由垂直驱动信号供给部207(参照图16)供给的驱动信号使镜子16c的反射镜部162以与轴部13正交的一个轴为中心高速旋转。由此,镜子16c的反射镜部162通过铁芯单元40和可动磁铁30的驱动以轴部13为轴往复旋转驱动,并且通过额外驱动部在与轴向正交的方向上也往复旋转驱动。
[0192]
旋转往复驱动致动器1c扭矩的产生效率高,热量难以传递至作为可动对象的镜子16c,并且能够确保作为反射面的反射镜部162的平面度的精度。另外,制造性高,组装精度良好,且即使镜子16c为大型镜子,也能够以高振幅驱动。
[0193]
[扫描系统的概略结构]
[0194]
图15是表示具有旋转往复驱动致动器的扫描系统200a的第一例的主要部分结构的块图,图16是表示具有旋转往复驱动致动器的扫描系统200b的第二例的主要部分结构的块图。
[0195]
图15所示的扫描系统200a中,扫描系统200具有激光发射部201、激光控制部202、致动器203、驱动信号供给部204、以及位置控制信号计算部205。
[0196]
扫描系统200a中,使用可以将镜子以一个轴往复旋转驱动的旋转往复驱动致动器203扫描对象物,作为旋转往复驱动致动器203,例如,能够应用本实施方式的旋转往复驱动致动器1~1b。
[0197]
激光控制部202驱动激光发射部201,并控制照射的激光。激光发射部201例如为用于作为光源的ld(激光二极管)以及用于输出的激光聚焦的透镜等。来自光源的激光光束经由透镜系统射出至致动器203的镜子16。
[0198]
位置控制信号计算部205参照旋转角度位置检测部70取得的实际的轴部13(镜子16)的角度位置和目标角度位置,生成并输出以使轴部13(镜子16)成为目标角度位置的方式进行控制的驱动信号。例如,位置控制信号计算部205基于取得的实际的轴部13(镜子16)的角度位置和表示目标角度位置的信号,生成位置控制信号,并输出至驱动信号供给部204,上述目标角度位置使用存储于未图示的波形存储器的锯齿波形(参照图6a)数据等变换而得到。
[0199]
驱动信号供给部204对致动器203的线圈43供给期望的驱动信号,将致动器203旋转往复驱动,扫描对象物。
[0200]
图16所示的扫描系统200b除了与扫描系统200a同样的激光发射部201及激光控制部202外,还具有致动器203a、致动器203a具备的水平扫描角度位置检测部702、水平驱动信号供给部204a、位置控制信号计算部205、垂直扫描角度位置检测部206、垂直驱动信号供给部207、以及位置控制信号计算部208。
[0201]
在扫描系统200b中,使用可以将镜子(具体而言,反射镜部162)以二个轴往复旋转驱动的致动器203a,扫描对象物,而且,作为致动器203a,能够应用本实施方式的旋转往复驱动致动器1c。
[0202]
作为致动器203a的旋转往复驱动致动器1c通过以轴部13为中心往复旋转驱动,使通过镜子16c的反射镜部162反射的激光光束水平射出。另外,在旋转往复驱动致动器1c中,使反射镜部162以沿与轴部13正交的方向延伸的轴为中心往复旋转驱动。
[0203]
水平扫描角度位置检测部702具有与旋转角度位置检测部70相同的功能,检测轴部13、进而检测反射镜部162的绕轴部13的旋转角度位置,并输出至位置控制信号计算部205。
[0204]
位置控制信号计算部205使用水平扫描角度位置检测部702取得的实际的轴部13的角度位置(镜子16的水平扫描中的角度位置)和存储于未图示的波形存储器的锯齿波形(参照图6a)数据等生成以成为目标角度位置的方式进行控制的位置控制信号,并输出至水平驱动信号供给部204a。水平驱动信号供给部204a具有与驱动信号供给部204同样的功能,向致动器203a的线圈43输出驱动信号,将致动器203的反射镜部162在水平扫描方向上旋转往复驱动,水平扫描对象物。
[0205]
垂直扫描角度位置检测部206检测反射镜部162中以与轴部13正交的轴(在此,x轴)为中心旋转移动的旋转角度位置,并输出至位置控制信号计算部208。
[0206]
位置控制信号计算部208基于垂直扫描角度位置检测部206取得的实际的轴部13、也就是镜子16的实际的垂直扫描中的角度位置和使用存储于未图示的波形存储器的垂直扫描用的锯齿波形数据等变换成的表示目标角度位置的信息,生成以成为目标角度位置的方式进行控制的位置控制信号,并输出至垂直驱动信号供给部207。垂直驱动信号供给部207向致动器203a输出驱动信号,将致动器203a的反射镜部162在垂直扫描方向上旋转往复驱动,垂直扫描对象物。
[0207]
此外,本实施方式中作为衰减部发挥功能的结构也可以在实施方式的旋转往复驱动致动器1、1a、1b、1c中适当变更应用,另外,也可以适当组合应用。例如,也可以组合具备作为使用了磁性流体r的旋转阻尼器的衰减器60、在衰减器60中更换磁性流体而使用了油的旋转阻尼器和低通滤波器、带阻滤波器、或者陷波滤波器等电滤波器78。由此,对于共振,能够得到更大的衰减,抑制瞬时振荡,成为控制性高的旋转往复驱动致动器1、1a、1b、1c。由此,能够实现作为旋转往复驱动致动器1、1a、1b、1c的可靠性的提高。
[0208]
另外,在本实施方式中,固定体20、20b侧的线圈43为设于铁芯单元40的结构,但不限于此,也可以不具有铁芯地构成本实施方式的旋转往复驱动致动器1、1a、1b、1c。例如,在振动致动器1中,也可以采用如下旋转往复驱动致动器:不具有铁芯41,而且具备具有轴部13及固定于轴部13的可动磁铁30的可动体和具有线圈43且将轴部13支撑为旋转自如的固定体,通过线圈43与可动磁铁30的电磁相互作用,相对于固定体使可动体10以轴部13为中心往复旋转驱动。此时,可动磁铁与可动磁铁30同样地,形成环形状,且在轴部13的外周交
替磁化形成s极及n极的偶数的磁极31、32而形成。另外,线圈与线圈43同样地,在固定体配置于相对于可动磁铁通过电磁相互作用产生使上述可动磁铁旋转的扭矩的位置。例如,线圈配置于通过与可动磁铁之间的电磁相互作用在偶数的磁极分别产生使可动磁铁往复旋转的扭矩的位置。
[0209]
由此,在不具有铁芯41且其它结构与振动致动器1同样地构成的振动致动器中,可动磁铁能够得到与可动磁铁30相同的作用效果。另外,在该振动致动器中,被线圈43磁化的磁极数和可动磁铁的磁极数相等。另外,被线圈磁化的偶数的磁极与可动磁铁30在轴部的径向上隔着气隙g分别对置配置。而且,构成为,在固定体具有旋转角度位置保持部24,旋转角度位置保持部24与可动磁铁30隔着气隙g对置配置,利用在可动磁铁30之间产生的磁吸引力保持可动磁铁30的旋转角度位置。通过该结构,制造性高,组装精度良好,且能够以高振幅驱动可动对象。
[0210]
以上,对本发明的实施方式进行了说明。此外,以上的说明是本发明的优选的实施方式的例子,本发明的范围不限定于此。也就是,关于上述装置的结构、各部分的形状的说明是一例,应当了解,在本发明的范围内,可以进行对这些例的各种的变更、追加。
[0211]
2018年6月26日申请的日本特愿2018-121167的日本申请包含的说明书、附图以及摘要的公开内容全部并入本申请。
[0212]
生产上的可利用性
[0213]
本发明的旋转往复驱动致动器具有制造性高、组装精度良好且即使可动对象为大型镜子也能够以高振幅驱动的效果,特别是可用作需要耐久性且使镜子旋转的扫描仪使用的旋转往复驱动致动器。
[0214]
符号说明
[0215]
1、1a、1b、1c—旋转往复驱动致动器,10、10a、10b—可动体,13、13a、13b—轴部,13a—一端部,13b—另一端部,15、15a、15b—镜架,16、16b、16c—镜子,162—反射镜部,16a—反射面,20、20b—固定体,22、22a、22b—基座,222、222a—一端面部,222a、224a—缺口孔,224、224a—另一端面部,226、226a—主体面部,23a、23b、232、234—轴承,24—磁铁位置保持部,27、27a—铁芯固定板,28、28a、29、29a—固定件,30—可动磁铁,31、32—磁极,34—磁极切换部,40—铁芯单元,41—铁芯,41a—第一铁芯,41b—第二铁芯,41c—架设铁芯,411a、411b—芯部,412a、412b—磁极,43、43a、43b—线圈,44—骨架,60—衰减器,62—壳体,63—磁铁,64—旋转体,641—圆盘部,642—凹部,644—外筒部,65—上盖部,652—内筒部,66—下盖部,70、70a—旋转角度位置检测部,702—水平扫描角度位置检测部,72—编码器盘,72a—磁传感器用磁铁,73a—保持件,74—光学传感器,74a—磁传感器,75a—固定部件,76、76a—传感器用基板,77—驱动信号供给部,78—电滤波器,200a、200b—扫描系统,201—激光发射部,202—激光控制部,203、203a—致动器,204—驱动信号供给部,204a—水平驱动信号供给部,205、208—位置控制信号计算部,206—垂直扫描角度位置检测部,207—垂直驱动信号供给部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1