一种悬挂式中低速永磁悬浮列车运动控制系统及控制方法与流程
[0001]
本发明涉及磁悬浮列车控制技术领域,具体涉及一种悬挂式中低速永磁悬浮列车运动控制系统及控制方法。
背景技术:
[0002]
目前在国内外,中低速磁悬浮列车的牵引方式的最优选择方案是采用短定子异步直线电机进行牵引。短定子异步直线电机牵引方式是在车上安装三相电枢绕组、牵引变压器及变流器等全套牵引装置,轨道上安装感应轨作为转子,车辆一般采用接触受流的方式从地面供电系统获取动力电源。这种方式结构优点是结构简单,容易维护,造价低,但主要缺点是功率偏低,效率低,列车本体笨重。我国的长沙机场线与北京s1线磁悬浮列车,以及日本的hsst型磁悬浮列车都采用这种推进方式。而长定子同步直线电机牵引方式是在轨道上全线铺设上定子线圈(称为长定子),车辆上的悬浮磁铁同时作为直线电机的转子,而所有的牵引供变电、变流控制、开关控制等设备均设在地面上。考虑到定子线圈的电能损耗、反电势等因素,要将线路上定子线圈划分了多个区间(称为牵引分区),每个牵引分区均设有完整的牵引供变电系统。仅有列车行经的区间的地面牵引系统在工作,列车在跨分区时相邻的牵引分区间进行自动交接。长定子直线电机的优势是牵引功率大、效率比短定子更高,能够实现更高的牵引速度,其缺点是地面设备多,系统复杂,工程造价高。
[0003]
因此,设计出一个稳定性更好、结构更简单、工程造价更低以及维护更加方便的基于长定子同步直线电机驱动方式的中低速悬挂式永磁悬浮列车运动控制系统是有很重要的研究意义以及应用价值。
[0004]
虽然直线电机的控制策略已经发展多年,但是目前仍以传统的pid控制策略为主。这主要是因为pid控制已经满足大多测控系统,并且pid程序编写方便、参数调试可靠性较高。但是pid控制在复杂的非线性时变系统中控制效果往往差强人意,特别是对于参数和结构不确定的控制系统,pid控制很难满足要求。直线电机伺服控制系统具有非线性的特点,若仅仅采用pid控制则无法达到期望的控制效果。因此,相关研究人员提出了复合控制的思想,即在pid控制中引入现代控制策略结合形成新型的控制方法。目前在直线电机控制策略中应用较好的是模糊pid控制,如王兴贵、袁泉等将模糊pid控制器应用于永磁直线同步电机伺服控制系统中,使得系统表现出较好的动态响应性能。但是在实际应用过程中由于直线电机驱动装置本身使得系统存在一定的滞后,模糊pid控制在抑制滞后的作用上无法达到预期的效果。
[0005]
因此,如果能够可以提出一种能够抑制滞后,并且控制效果优于模糊pid的直线电机控制策略,将提高列车的位置、速度控制精度以及增强系统的鲁棒性。
技术实现要素:
[0006]
针对现有技术的不足,本发明旨在提供一种悬挂式中低速永磁悬浮列车运动控制系统及控制方法。
[0007]
为了实现上述目的,本发明采用如下技术方案:
[0008]
一种悬挂式中低速永磁悬浮列车运动控制系统,包括上位机模块、控制单元模块、运动控制模块以及交叉回线系统;
[0009]
所述上位机模块包括触摸屏和主控计算机;所述控制单元模块包括控制模块和plc控制器,控制模块采用stm32f407微型控制器,plc控制器采用西门子s7-1200 plc;所述运动控制模块包括s120变频器和无铁芯长定子的永磁直线同步电机;
[0010]
所述s120变频器和所述plc控制器通讯连接;
[0011]
所述交叉回线系统通过光纤接口通讯连接于所述控制模块,用于将列车当前位置和当前速度信息传输给控制模块;所述主控计算机和所述控制模块通讯连接,所述触摸屏和所述plc控制器通讯连接,所述控制模块和plc控制器通讯连接;
[0012]
交叉回线系统反馈的列车当前位置和当前速度的信息经控制模块传输至plc控制器,所述plc控制器据此发出相应的控制字报文指令给所述s120变频器,所述s120变频器根据plc控制器的控制字报文指令驱动永磁直线同步电机,实现永磁悬浮列车的自动牵引制动功能。
[0013]
进一步地,主控计算机和触摸屏分别接收来自交叉回线系统以及plc控制器传输的关键状态信号并实时显示在各自的监控画面上,关键状态信号包括列车当前位置、列车当前速度、当前电机电流和当前电机电压,列车当前位置和列车当前速度由交叉回线系统获取,当前电机电流和当前电机电压由s120变频器获取;其中,交叉回线系统反馈的关键状态信号首先传输至控制模块,所述控制模块再传输至主控计算机;s120变频器所获取的关键状态信号传输至plc控制器,并由plc控制器传输至触摸屏。
[0014]
进一步地,主控计算机和触摸屏均具有状态监测功能,所述状态监测功能包括实时数据显示功能、波形显示功能、故障显示功能以及系统运行日志功能;所述实时数据显示功能用于对列车关键状态信号进行实时显示;所述波形显示功能用于对列车当前速度以及当前电机电流变化趋势通过波形的方式进行显示;所述故障显示功能用于对故障情况进行实时显示以及对历史故障信息进行查询显示;所述系统运行日志功能用于记录和显示系统每日的运行情况。
[0015]
进一步地,所述plc控制器具有列车控制功能,包括列车启动和停止功能、精准定位和速度控制功能、数据通信控制功能以及故障复位控制功能;所述列车启动和停止功能用于控制列车的平稳启动以及停车;所述精准定位和速度控制功能用于控制列车在目标速度上下波动较小的情况下运行,并控制列车在目标停车位置上精准停车;所述数据通信控制功能用于实现和s120变频器之间数据交互正常;所述故障复位控制功能用于在s120变频器遇到故障时,接收s120变频器的故障信号并控制s120变频器进行故障复位操作。
[0016]
进一步地,所述永磁直线同步电机采用定子电流d轴分量恒定为零的转子磁链定向解耦控制方式,构建基于矢量控制的位置、速度和电流的三闭环矢量控制系统;所述三闭环矢量控制系统中位置环和电流环均采用pid控制策略,而速度环采用模糊预测pid控制策略;所述三闭环矢量控制系统中,最外环是位置环,首先列车期望位置信号s
*
与列车反馈位置信号s的偏差作为位置环pid控制器的输入,位置环pid控制器根据位置偏差信号输出相应的列车速度期望值ω
r*
;中间环是速度环,根据电机实际旋转角度θ计算出电机实际转速ω
r
,电机实际转速ω
r
与预测模型得出的模型预测值ω
m
经过反馈校正模块得出未来时刻预
测速度值ω
p
,而反馈的预测速度值ω
p
与电机转速期望值ω
r*
的偏差作为模糊pid控制器的输入,模糊pid控制器输出相应的电流期望值i
sq*
;最内环是两个电流环:d-q坐标系q方向电流环和d-q坐标系d方向电流环;在d-q坐标系q方向电流环的电流期望值i
sq*
与电流反馈量i
sq
的偏差值作为q方向pid控制器的输入,q方向pid控制器输出相应的电压u
q
;而在d-q坐标系d方向电流环的电流期望值i
sd*
与电流反馈量i
sd
的偏差值作为d方向pid控制器的输入,d方向pid控制器输出相应的电压u
d
;u
q
与u
d
作为输入给dq-αβ坐标系转换模块,dq-αβ坐标系转换模块输出α-β坐标系下的u
α
与u
β
给svpwm模块以此来调节svpwm信号的占空比,从而用svpwm信号去控制三相逆变电路中开关管的通断,最终输出相应的幅值、频率的三相电压(u
a
,u
b
,u
c
)驱动永磁同步直线电机按照特定速度、特定目标停车位置运行;其中,i
sq
和i
sd
是由在a,b,c三相静止坐标系下的三相逆变电路输出的静止三相电流i
a
,i
b
,i
c
,经过abc-αβ坐标系转换模块后输出为在α-β坐标系下静止两相i
α
,i
β
,再经过αβ-dq坐标系转换模块后输出的在d-q旋转两相坐标系下的电流;速度环控制部分采用模糊pid控制原理,而反馈部分采用dmc预测原理。
[0017]
进一步地,所述主控计算机与控制模块采用rs232串口进行数据交互,所述触摸屏与plc控制器采用profinet通信方式进行数据交互,控制模块与plc控制器之间采用modbus协议进行通信。
[0018]
进一步地,所述plc控制器采用profinet报文通信方式与所述s120变频器进行数据交互。
[0019]
进一步地,将永磁同步直线电机的长定子线圈分成n个区段,每区段的长度相同,分别由n个独立的接触器km 1-km n供电控制;s120变频器中包括有逆变模块mm1和逆变模块mm2;相邻的两个区段的长定子线圈分别由逆变模块mm1和逆变模块mm2控制,plc控制器通过控制对应的接触器的吸合或断开以及逆变模块的电流输出来实现永磁悬浮列车只在车辆所在区段接通电源;当某一区段的长定子线圈通电时,在动子永磁体和长定子线圈之间的气隙中产生行波磁场,在行波磁场与动子永磁体的作用下产生驱动力,从而实现永磁悬浮列车在两个站点之间往返直线运行。
[0020]
本发明还提供一种利用上述控制系统对永磁悬浮列车的控制方法,具体过程如下:
[0021]
4)永磁悬浮列车停靠在站点一准备发车,主控计算机发出发车命令信息,发车命令信息包括目标速度、目标停车位置以及列车启动信号;
[0022]
5)plc控制器接收到发车命令信息,控制接触器km1和km2触点吸合并给s120变频器发出报文控制字,包括电机启动控制字、目标速度字以及目标停车位置字;逆变模块mm1输出电流,第一区段长定子线圈得电,列车在第一区段以特定加速度至目标速度运行;
[0023]
当永磁悬浮列车运行到第一区段和第二区段的过渡处时,plc控制器给s120变频器首先发出电机自由滑行控制字,延时2s之后发出电机减速制动控制字,然后发出电机启动控制字;逆变模块mm1停止输出电流,逆变模块mm2输出电流给第二区段的长定子供电,列车在第二区段以目标速度运行;
[0024]
当永磁悬浮列车运行到第二区段和第三区段过渡处时,plc控制器控制接触器km1触点断开、控制接触器km3触点接通,并给s120变频器发出报文控制字:首先发出电机自由滑行控制字,延时2s之后发出电机减速制动控制字,然后发出电机启动控制字;逆变模块
mm2停止输出电流,逆变模块mm1输出电流给第三区段的长定子供电,列车在第三区段继续以目标速度运行;
[0025]
以此类推,直至永磁悬浮列车在第n区段继续以目标速度运行;
[0026]
6)当列车位置靠近目标停车位置时,plc控制器给s120变频器发出报文控制字,包括电机减速制动控制字,目标速度为0的目标速度字;列车减速制动运行至目标停车位置站点二并抱闸停车。
[0027]
上述控制方法中,当永磁悬浮列车在运行过程中s120变频器的逆变模块出现故障时,plc控制器接收到s120变频器输出的故障信号后发出电机紧急滑制动控制字,列车紧急制动至停车在某个位置;通过按下触摸屏界面的故障复位按钮,plc控制器发出故障复位控制字,对s120变频器进行故障复位操作;故障复位后列车收到发车指令后继续从故障停车位置开始启动运行。
[0028]
本发明的有益效果在于:
[0029]
1、本发明采用长定子永磁同步直线电机方式驱动中低速永磁悬浮列车,使得列车爬坡能力更强、更轻便以及运行效率更高,成功克服了基于短定子异步电机驱动的传统中低速永磁悬浮列车爬坡能力弱、效率低下以及列车本体笨重等缺点。
[0030]
2、本发明选用stm32f407控制模块以及西门子s7-1200 plc作为双核控制器,选用s120变频器作为电机驱动装置,从而具有模块化设计和双轴驱动功能。整个系统模块化程度高,结构简单、稳定性好、工程造价低、维护方便,成功克服了基于长定子同步直线电机驱动系统的设计复杂,工程造价高以及维护不便等不足。
[0031]
3、本发明选用交叉回线定位方式来反馈永磁悬浮列车位置以及速度信息,具有较好的定位精度。
[0032]
4、本发明采用定子电流d轴分量恒定为零的转子磁链定向解耦控制方式,构建位置、速度和电流三闭环矢量控制系统,并在速度环中设计模糊预测pid控制器,结合了模糊控制的快速响应能力、传统pid控制的较小稳态误差优势以及dmc预测控制的提前预测特性,三者优势互补,与传统pid控制和模糊pid控制相比更能提高列车速度跟踪性能。
附图说明
[0033]
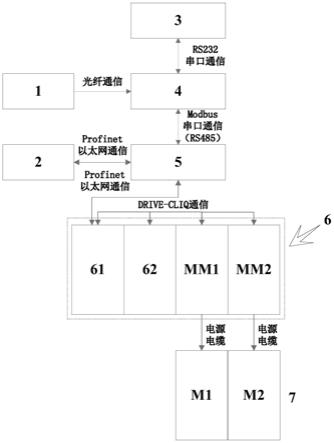
图1为本发明实施例1控制系统的总体结构示意图;
[0034]
图2为本发明实施例1基于矢量控制的位置、速度和电流三闭环系统结构示意图;
[0035]
图3为本发明实施例1控制系统功能示意图;
[0036]
图4为本发明实施例1列车牵引示意图;
[0037]
图5为本发明实施例2的列车控制方法流程示意图。
具体实施方式
[0038]
以下将结合附图对本发明作进一步的描述,需要说明的是,本实施例以本技术方案为前提,给出了详细的实施方式和具体的操作过程,但本发明的保护范围并不限于本实施例。
[0039]
实施例1
[0040]
一种悬挂式中低速永磁悬浮列车运动控制系统,如图1所示,包括上位机模块、控
制单元模块、运动控制模块以及交叉回线系统1;
[0041]
所述上位机模块包括kpt700型号触摸屏2和ipc-610主控计算机3;所述控制单元模块包括控制模块4和plc控制器5,控制模块4采用stm32f407微型控制器,plc控制器5选用西门子s7-1200 plc;所述运动控制模块包括书本型的s120变频器6、无铁芯长定子的永磁直线同步电机7(本实施例中包含有两个永磁直线同步电机m1和m2);
[0042]
所述交叉回线系统1通过光纤接口通讯连接于所述控制模块4,用于将列车当前位置和当前速度信息传输给控制模块。交叉回线系统的定位精度可达2.6mm左右,具有较高的列车定位精度。
[0043]
所述主控计算机3与控制模块4采用rs232串口进行数据交互,所述触摸屏2与plc控制器5采用profinet通信方式进行数据交互,控制模块4与plc控制器5之间采用modbus协议进行通信。
[0044]
所述s120变频器6由控制单元cu320-2pn 61、整流模块blm 62以及逆变模块组成(本实施例中逆变模块包括有两个,分别为mm1和mm2)。控制单元cu320-2pn 61是s120变频器的大脑,负责控制和协调整个运动控制模块中的所有模块,完成各轴的电流环、速度环以及位置环的控制,并且同一块控制单元控制的各轴之间能相互交换数据;整流模块blm 62用于将三相交流电整流成直流电,供给逆变模块(又常称电机模块);逆变模块用于将整流模块传输过来直流电逆变成三相交流电驱动各类电机运行。控制单元cu320-2pn 61、整流模块blm 62以及逆变模块两两之间通过drive-cliq接口进行快速数据交互。
[0045]
所述plc控制器5采用profinet报文通信方式与所述s120变频器进行数据交互,其中,plc控制器分别与控制单元cu320-2pn、整流模块blm以及逆变模块采用标准390报文(pzd2/2)、标准371报文方式(pzd5/8)、标准111报文(pzd12/12)进行通信。plc控制器与控制单元cu320-2pn交互的输入数据是cu320端子状态,比如显示熔断器、主接触器的状态等;plc控制器与整流模块blm交互的输入数据主要是blm状态字、直流母线电压/电流以及故障代码等等信息,交互的输出数据是blm控制字指令;而plc控制器与逆变模块交互的输入数据主要是逆变模块状态字、电机输出电流/电压、输出速度、输出转矩、输出频率、电机温度、电机实际位置以及故障代码等等信息,交互的输出数据是逆变模块控制字、给定目标速度以及给定目标位置等指令。
[0046]
交叉回线系统反馈的列车当前位置和当前速度的信息经控制模块传输至plc控制器,所述plc控制器据此发出相应的控制字报文指令给所述s120变频器,所述s120变频器根据plc控制器的控制字报文指令驱动永磁直线同步电机m1和m2,实现永磁悬浮列车的自动牵引制动功能。
[0047]
如图2所示,由于永磁直线同步电机的基本原理和旋转电机类似,但是由于永磁直线同步电机的铁芯不闭合,励磁绕组和三相定子绕组间存在电磁耦合,以及端部效应和齿槽效应等非线性因素,因此要建立直线电机模型时必须进行合理等效简化。根据电机模型的等效简化原理,永磁直线同步电机模型从最初始的a,b,c三相静止坐标系等效在α-β两相静止坐标系上,再等效到d-q两相同步旋转坐标系上。图2中,abc-a,b,c三相静止坐标系;αβ-α-β两相静止坐标系;dq-d-q两相同步旋转坐标系。
[0048]
根据同步电机磁场定向控制原理,所述永磁直线同步电机采用定子电流d轴分量恒定为零(i
sd*
=0)的转子磁链定向解耦控制方式,构建基于矢量控制的位置、速度和电流
的三闭环矢量控制系统;所述三闭环矢量控制系统中位置环和电流环均采用pid控制策略,而速度环采用模糊预测pid控制策略;所述模糊预测pid控制策略结合了模糊控制的快速响应能力、传统pid控制的较小稳态误差优势和dmc预测控制的能提前预测、鲁棒性强优点,三者优势互补。所述三闭环矢量控制系统中,最外环是位置环,首先列车期望位置信号s
*
与列车反馈位置信号s的偏差作为位置环pid控制器(即图2中的pid控制器1)的输入,位置环pid控制器根据位置偏差信号输出相应的列车速度期望值ω
r*
;中间环是速度环,根据电机实际旋转角度θ计算出电机实际转速ω
r
,电机实际转速ω
r
与预测模型得出的模型预测值ω
m
经过反馈校正模块得出未来时刻预测速度值ω
p
,而反馈的预测速度值ω
p
与电机转速期望值ω
r*
的偏差作为模糊pid控制器的输入,模糊pid控制器输出相应的电流期望值i
sq*
;最内环是两个电流环:d-q坐标系q方向电流环和d-q坐标系d方向电流环。在d-q坐标系q方向电流环的电流期望值i
sq*
与电流反馈量i
sq
的偏差值作为q方向pid控制器(即图2中的pid控制器2)的输入,q方向pid控制器输出相应的电压u
q
。而在d-q坐标系d方向电流环的电流期望值i
sd*
(i
sd*
=0)与电流反馈量i
sd
的偏差值作为d方向pid控制器(即图2中的pid控制器3)的输入,d方向pid控制器输出相应的电压u
d
。u
q
与u
d
作为输入给dq-αβ坐标系转换模块,dq-αβ坐标系转换模块输出α-β坐标系下的u
α
与u
β
给svpwm模块以此来调节svpwm信号的占空比,从而用svpwm信号去控制三相逆变电路中开关管的通断,最终输出相应的幅值、频率的三相电压(u
a
,u
b
,u
c
)驱动永磁同步直线电机按照特定速度、特定目标停车位置运行。其中,i
sq
和i
sd
是由在a,b,c三相静止坐标系下的三相逆变电路输出的静止三相电流i
a
,i
b
,i
c
,经过abc-αβ坐标系转换模块后输出为在α-β坐标系下静止两相i
α
,i
β
,再经过αβ-dq坐标系转换模块后输出的在d-q旋转两相坐标系下的电流。速度环控制部分采用模糊pid控制原理,而反馈部分采用dmc预测原理。
[0049]
如图3所示,所述悬挂式中低速永磁悬浮列车运动控制系统的主要功能通过状态监测与列车控制两方面来实现。
[0050]
在状态监测方面,主控计算机3和触摸屏2具有状态监测功能,主控计算机3和触摸屏2分别接收来自交叉回线系统1以及plc控制器5传输的关键状态信号并实时显示在各自的监控画面上,以便于用户及时查看列车实时运行状况,关键状态信号包括列车当前位置、列车当前速度、当前电机电流和当前电机电压,列车当前位置和列车当前速度由交叉回线系统获取,当前电机电流和当前电机电压由s120变频器获取。其中,交叉回线系统1反馈的关键状态信号首先传输至控制模块4,所述控制模块4再传输至主控计算机3。s120变频器6所获取的关键状态信号传输至plc控制器5,并由plc控制器5传输至触摸屏2中显示。
[0051]
所述主控计算机和触摸屏的状态监测功能包括实时数据显示功能、波形显示功能、故障显示功能以及系统运行日志功能;所述实时数据显示功能用于对列车关键状态信号进行实时显示;所述波形显示功能用于对列车当前速度以及当前电机电流变化趋势通过波形的方式进行显示;所述故障显示功能用于对故障情况进行实时显示以及对历史故障信息进行查询显示;所述系统运行日志功能用于记录和显示系统每日的运行情况。
[0052]
在列车控制方面,所述plc控制器具有列车控制功能,其根据交叉回线系统反馈的列车当前位置、列车当前速度发出相应的控制字报文指令给s120变频器,s120变频器驱动永磁直线同步电机,实现永磁悬浮列车的牵引制动功能。
[0053]
所述plc控制器所具有的列车控制功能主要包括列车启动和停止功能、精准定位
和速度控制功能、数据通信控制功能以及故障复位控制功能;所述列车启动和停止功能用于控制列车的平稳启动以及停车;所述精准定位和速度控制功能用于控制列车在目标速度上下波动较小的情况下运行,并控制列车在目标停车位置上精准停车;所述数据通信控制功能用于实现和s120变频器之间数据交互正常;所述故障复位控制功能用于在s120变频器遇到故障时,接收s120变频器的故障信号并控制s120变频器进行故障复位操作。
[0054]
本实施例中,所述悬挂式中低速永磁悬浮列车采用无铁芯长定子的永磁同步直线电机列车进行牵引制动,在不需要较高列车运行速度的前提下,无铁芯电机是好的选择,其优点是无齿槽效应,能够实现精度更高的定位。如图4所示,所述永磁同步直线电机的动子永磁体101安装在永磁悬浮列车100顶部,与列车同步运行。
[0055]
一般地,悬挂式永磁悬浮试验线由永磁悬浮模块、永磁直线同步电机驱动模块、智能定位与走行控制模块、数据传输与运行控制模块、供电模块、轨道支撑与基础等六大部分组成,通过运控单元的协调调度实现稳定运行的。
[0056]
为了提高列车运行效率,减少能耗,在本实施例中,悬挂式永磁悬浮试验线采用长定子分段供电方式,实现直线电机高效分区牵引驱动。长定子线圈分区数以实际运行情况而定,其与永磁同步直线电机的载荷量以及列车本身有关。为了方便理解,如图4所示,在本实施例中设定永磁同步直线电机100的长定子线圈102分成了四区段,每区段相同间隔距离(x/4)米,分别由四个独立的接触器km1-km4供电控制。其中第一区段和第三区段的长定子线圈由逆变模块mm1控制,第二区段和第四区段的长定子线圈由逆变模块mm2控制,通过控制相应接触器km1-km4的吸合/关闭状态以及逆变模块的电流输出来实现永磁悬浮列车只在车辆所在区段接通电源。当某一段长定子线圈通电时,在动子永磁体和长定子线圈之间的气隙中产生行波磁场,在行波磁场与动子永磁体的作用下产生驱动力,从而实现永磁悬浮列车在站点一和站点二之间往返直线运行。
[0057]
实施例2
[0058]
本实施例提供一种利用实施例1所述控制系统对永磁悬浮列车的控制方法。本实施例中,永磁悬浮列车在站点一和站点二之间的悬挂式永磁悬浮试验线上运行,该悬挂式永磁悬浮试验线的长度为x米。其中,qw78表示mm1控制字;qw102表示mm2控制字;qw80表示mm1速度给定;qw104表示mm2速度给定。
[0059]
如图5所示,具体流程如下:
[0060]
7)永磁悬浮列车停靠在站点一准备发车,主控计算机发出发车命令信息,发车命令信息包括目标速度、目标停车位置以及列车启动信号。
[0061]
8)plc控制器接收到发车命令信息,控制接触器km1和km2触点吸合并给s120变频器发出报文控制字:qw78=16#47f(电机启动)、目标速度字qw80以及目标停车位置字。逆变模块mm1输出电流,第一区段长定子线圈得电,列车在第一区段以特定加速度至目标速度运行。
[0062]
9)当永磁悬浮列车运行到第一区段和第二区段的过渡处时,plc控制器给s120变频器发出报文控制字:qw78=16#47d(电机自由滑行),延时2s之后qw78=16#47e(电机减速制动);qw102=16#47f(电机启动)。逆变模块mm1停止输出电流,逆变模块mm2输出电流给第二区段的长定子供电,列车在第二区段以目标速度运行。
[0063]
10)当永磁悬浮列车运行到第二区段和第三区段过渡处时,plc控制器控制接触器
km1触点断开、控制接触器km3触点接通,并给s120变频器发出报文控制字:qw102=16#47d(电机自由滑行),延时2s之后qw102=16#47e(电机减速制动);qw78=16#47f(电机启动)。逆变模块mm2停止输出电流,逆变模块mm1输出电流给第三区段的长定子供电,列车在第三区段继续以目标速度运行。
[0064]
11)当永磁悬浮列车运行到第三区段和第四区段的过渡处时,plc控制器控制接触器km2触点断开、控制接触器km4触点接通并给s120变频器发出报文控制字:qw78=16#47d(电机自由滑行),延时2s之后qw78=16#47e(电机减速制动);qw102=16#47f(电机启动)。逆变模块mm1停止输出电流,逆变模块mm2输出电流给第四区段的长定子供电,列车在第四区段继续以目标速度运行。
[0065]
12)当列车位置靠近目标停车位置时,plc控制器给s120变频器发出报文控制字:qw102=16#47e(电机减速制动),目标速度字qw104=0。列车减速制动运行至目标停车位置站点二并抱闸停车。
[0066]
当永磁悬浮列车在运行过程中s120变频器的逆变模块mm1或mm2出现故障时,plc控制器接收到s120变频器输出的故障信号后发出报文控制字:qw78=16#47b(电机紧急滑制动),列车紧急制动至停车在某个位置。通过按下触摸屏界面的故障复位按钮,plc控制器发出报文控制字:qw78=16#4de(故障复位),对s120变频器进行故障复位操作。故障复位后列车收到发车指令后继续从故障停车位置开始启动运行。
[0067]
对于本领域的技术人员来说,可以根据以上的技术方案和构思,给出各种相应的改变和变形,而所有的这些改变和变形,都应该包括在本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1