基于陀螺仪的集电杆跳零及缺相保护系统及方法与流程
1.本发明属于码头设备领域,尤其涉及到一种基于陀螺仪的集电杆跳零及缺相保护系统及方法。
背景技术:
2.码头设备通过集电杆与供电滑触线接触进而通电进行工作,在运行过程中集电杆与滑触线处于滑动连接状态,且会出现跳脱断开的现象,不仅会影响设备的正常运行,还会引发安全事故。
3.现有的集电杆状态检测装置有接近感应检测和电压检测两种。接近感应检测因检测面过小,容易出现误检测现象。集电杆碳刷与滑触线接触面存在瞬间接触不充分,会造成电压检测出现失误,随着能量反馈系统的大量普及,将作业时产生的能量经滑触线反馈给电网,使得电压检测也不准确。
技术实现要素:
4.本发明的一个目的是提供一种基于陀螺仪的集电杆跳零及缺相保护系统及方法,并提供至少后面将说明的优点。
5.本发明的另一个目的是提供一种基于陀螺仪的集电杆跳零及缺相保护系统及方法。采用陀螺仪检测集电杆的姿态,当其与预定姿态数据值阈值不符合时,则进行脱扣操作,不会出现误判现象,能够在集电杆跳脱时及时进行脱扣,可以在高架滑触线供电港口推广使用。
6.本发明的技术方案如下:
7.基于陀螺仪的集电杆跳零及缺相保护系统,其包括:
8.四个陀螺仪传感器,其分别设置在每根集电杆上并实时检测每根所述集电杆的当前姿态数据值;
9.数据传输单元,其与所述陀螺仪传感器电连接;
10.控制器,其内预先存储有每根集电杆的预定姿态数据值阈值,且接收所述数据传输单元发来的当前姿态数据值,当所述当前姿态数据值超出所述预定姿态数据值阈值时判断所述集电杆出现故障,并发出脱扣信号;
11.断路器,其设置在所述集电杆与待供电设备之间,且所述断路器与所述控制器电连接并接收所述脱扣信号,断开所述集电杆与所述待供电设备之间的电路。
12.优选的是,所述的基于陀螺仪的集电杆跳零及缺相保护系统中,还包括电源,其与所述陀螺仪传感器、所述数据传输单元和所述控制器电连接,所述电源为直流电容电源。
13.优选的是,所述的基于陀螺仪的集电杆跳零及缺相保护系统中,所述电源包括:
14.连接在交流电源上的电容储能电路;
15.连接在所述电容储能电路输出端的整流变压电路,其为所述陀螺仪传感器、所述数据传输单元和所述控制器供电。
16.优选的是,所述的基于陀螺仪的集电杆跳零及缺相保护系统中,所述电容储能电路的输出端还设置有断路器电源电路,其与所述断路器电连接,并为其供电。
17.优选的是,所述的基于陀螺仪的集电杆跳零及缺相保护系统中,所述数据传输单元为无线信号收发器或数据总线。
18.基于陀螺仪的集电杆跳零及缺相保护方法,其包括以下步骤:
19.预先存储有每根集电杆的预定姿态数据阈值;
20.接收陀螺仪传感器实时检测到的每根集电杆的当前姿态数据值;
21.比较所述当前姿态数据值和所述预定姿态数据阈值,当任意一根所述集电杆的所述当前姿态数据值超出所述预定姿态数据阈值时,判断为可能出现故障;
22.预先设定一波动时间,当间隔所述波动时间后,再次比较所述当前姿态数据值和所述预定姿态数据阈值,当任意一根所述集电杆的所述当前姿态数据值超出所述预定姿态数据阈值时,判断为已出现故障,发出脱扣信号,完成脱扣。
23.优选的是,所述的基于陀螺仪的集电杆跳零及缺相保护方法中,接收陀螺仪传感器检测到的每根集电杆的当前姿态数据值之前还包括对陀螺仪传感器检测到的数据进行卡尔曼滤波算法优化处理。
24.优选的是,所述的基于陀螺仪的集电杆跳零及缺相保护方法中,所述卡尔曼滤波处理包括:
25.设定一初始卡尔曼增益值;
26.接收陀螺仪传感器发来的初始姿态数据值,根据所述初始卡尔曼增益值、所述初始姿态数据值和初始预定姿态阈值计算出初始姿态数据估计值;
27.根据所述初始姿态数据估计值和所述初始预定姿态阈值计算出初始姿态数据偏差,并计算出当前卡尔曼增益值作为校正后卡尔曼增益值;
28.将所述校正后卡尔曼增益值作为后续计算的初始卡尔曼增益值进行计算,进而得到每个时刻的姿态数据估计值,并将其作为集电杆的当前姿态数据值。
29.本发明具有以下有益效果:
30.采用陀螺仪传感器进行集电杆的三维姿态检测,检测数据准确;
31.工作电源采用直流电容电源,能够稳定的为整个系统进行供电。
32.本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
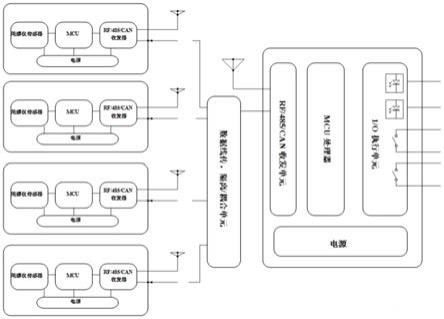
33.图1为本发明提供的基于陀螺仪的集电杆跳零及缺相保护系统的一个实施例的架构图;
34.图2为本发明提供的基于陀螺仪的集电杆跳零及缺相保护系统的一个实施例中的直流电容电源的电路图;
35.图3为本发明提供的基于陀螺仪的集电杆跳零及缺相保护方法的流程图。
具体实施方式
36.下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文
字能够据以实施。
37.应当理解,本文所使用的诸如“具有”、“包含”以及“包括”术语并不配出一个或多个其它元件或其组合的存在或添加。
38.如图1所示,本发明提供一种基于陀螺仪的集电杆跳零及缺相保护系统,其包括:
39.四个陀螺仪传感器,其分别设置在每根集电杆上并实时检测每根所述集电杆的当前姿态数据值;
40.数据传输单元,其与所述陀螺仪传感器电连接,其为rf/485/can收发器,可以采用其中任何一种;
41.控制器,其内预先存储有每根集电杆的预定姿态数据值阈值,且接收所述数据传输单元发来的当前姿态数据值,当所述当前姿态数据值超出所述预定姿态数据值阈值时判断所述集电杆出现故障,并发出脱扣信号;
42.断路器,其设置在所述集电杆与待供电设备之间,且所述断路器与所述控制器电连接并接收所述脱扣信号,断开所述集电杆与所述待供电设备之间的电路。
43.在本发明提供的所述的基于陀螺仪的集电杆跳零及缺相保护系统的一个实施例中,还包括电源,其与所述陀螺仪传感器、所述数据传输单元和所述控制器电连接,所述电源为直流电容电源。
44.如图2所示,在本发明提供的所述的基于陀螺仪的集电杆跳零及缺相保护系统的一个实施例中,所述电源包括:
45.连接在交流电源上的电容储能电路,即超级电容储能部分;
46.连接在所述电容储能电路输出端的整流变压电路,其为所述陀螺仪传感器、所述数据传输单元和所述控制器供电,即工作电源。
47.在本发明提供的所述的基于陀螺仪的集电杆跳零及缺相保护系统的一个实施例中,所述电容储能电路的输出端还设置有断路器电源电路,其与所述断路器电连接,并为其供电,有隔离脱扣驱动和24v脱扣驱动两种,可以适用于不同种类的断路器。
48.在本发明提供的所述的基于陀螺仪的集电杆跳零及缺相保护系统的一个实施例中,所述数据传输单元为无线信号收发器或数据总线。
49.如图3所示,基于陀螺仪的集电杆跳零及缺相保护方法,其包括以下步骤:
50.预先存储有每根集电杆的预定姿态数据阈值;
51.接收陀螺仪传感器实时检测到的每根集电杆的当前姿态数据值;
52.比较所述当前姿态数据值和所述预定姿态数据阈值,当任意一根所述集电杆的所述当前姿态数据值超出所述预定姿态数据阈值时,判断为可能出现故障,即预报警;
53.预先设定一波动时间,当间隔所述波动时间后,再次比较所述当前姿态数据值和所述预定姿态数据阈值,当任意一根所述集电杆的所述当前姿态数据值超出所述预定姿态数据阈值时,判断为已出现故障,发出脱扣信号,完成脱扣,即重复分析。
54.在本发明提供的所述的基于陀螺仪的集电杆跳零及缺相保护方法的一个实施例中,接收陀螺仪传感器检测到的每根集电杆的当前姿态数据值之前还包括对陀螺仪传感器检测到的数据进行卡尔曼滤波算法优化处理,卡尔曼滤波处理是陀螺仪数据处理的常用手段,因此在此不再详细说明。
55.在本发明提供的所述的基于陀螺仪的集电杆跳零及缺相保护方法的一个实施例
中,所述卡尔曼滤波处理包括:
56.设定一初始卡尔曼增益值;
57.接收陀螺仪传感器发来的初始姿态数据值,根据所述初始卡尔曼增益值、所述初始姿态数据值和初始预定姿态阈值计算出初始姿态数据估计值;
58.根据所述初始姿态数据估计值和所述初始预定姿态阈值计算出初始姿态数据偏差,并计算出当前卡尔曼增益值作为校正后卡尔曼增益值;
59.将所述校正后卡尔曼增益值作为后续计算的初始卡尔曼增益值进行计算,进而得到每个时刻的姿态数据估计值,并将其作为集电杆的当前姿态数据值。
60.本发明中的姿态数据包括有加速度和角度等,本领域技术人员可根据需要进行选择,在此不再详细说明其具体计算过程。
61.采用本发明提供的基于陀螺仪的集电杆跳零及缺相保护系统,采用超级电容配合直流脱扣,在静态测试环境下能连续跳闸6次,电容容量可以扩充;在动态情况下跳闸测试,集电杆一脱出立即跳闸。系统启动情况下,轮胎吊正常作业,没有出现误动作。使用几个月没有出现误动作,动态情况下弹出过一次,及时进行了跳闸。
62.本发明提供的基于陀螺仪的集电杆跳零及缺相保护系统及方法,可在高架滑触线供电港机设备推广使用。
63.尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1