基于BUCK电路拓扑结构的电磁抱闸电源的制作方法
基于buck电路拓扑结构的电磁抱闸电源
技术领域
1.本实用新型涉及风力发电机技术领域,尤其涉及一种基于buck电路拓扑结构的电磁抱闸电源。
背景技术:
2.风力发电机的刹车制动通常使用电磁抱闸来完成,然而电磁抱闸的启动需要一定的启动电压和维持电压。传统的电磁抱闸启动通常直接将高压加至抱闸,使抱闸达到启动电压吸合闸瓦,不会再进行抱闸端电压切换,导致传统电磁抱闸维持运行方案需要消耗大量的电能,造成能量的浪费。虽然传统的电磁抱闸整体电路结构简单,但缺乏必要的电路保护。具体为:
3.首先,抱闸启动后的维持电压实际上小于启动时所需电压,传统抱闸启动后的电压不再改变,其维持电压远大于所需电压,从而造成大量的能量浪费,增加成本。
4.其次,传统抱闸运行的主电路中缺乏必要的检测反馈与保护,一旦输入电压过压,很可能导致抱闸电流过大烧坏抱闸,造成事故。
5.第三,抱闸在长期运行过程中会出现磨损,导致启动所需功率提高,而传统电源并无自适应修正启动功率功能,需要更换电源或抱闸,操作复杂,对于风机抱闸维护成本较高。
技术实现要素:
6.为此,本实用新型所要解决的技术问题是:提供一种基于buck电路拓扑结构的电磁抱闸电源,耗能低,抱闸使用寿命长,具备良好的软硬件保护功能,有效保护后端抱闸及其他设备。
7.于是,本实用新型提供了一种基于buck电路拓扑结构的电磁抱闸电源,包括:整流桥、控制系统、以及与控制系统中pwm模块连接的隔离电路、与控制系统中adc模块连接的用于检测整流桥输出电压的电压检测电路、与控制系统中adc模块连接的用于检测整流桥输出电流的电流检测电路、与控制系统中逻辑控制模块及电压给定信号连接的比较器、与控制系统中通讯模块连接的风机主控制器,所述隔离电路的输出端与驱动电路连接、所述驱动电路的输出端分别与保护功能无触点开关元件和开关功能无触点开关元件连接,保护功能无触点开关元件和开关功能无触点开关元件彼此串联后保护功能无触点开关元件的一端与整流桥的正极输出端连接,开关功能无触点开关元件的一端为电磁抱闸电源的正极输出端,整流桥的负极输出端为电磁抱闸电源的负极输出端,比较器的输入端与电压检测模块的输出端连接。
8.其中,在所述开关功能无触点开关元件的一端串联熔断器后再作为电磁抱闸电源的正极输出端。
9.所述控制系统为stm32g03控制芯片、或者dspf28335控制芯片、或者stm32f1 03控制芯片。
10.所述保护功能无触点开关元件和开关功能无触点开关元件为mos管、或者igbt管、或者gtr管。
11.当控制系统收到风机主控制器发出的启动抱闸信号时,设定启动抱闸的输出电压给定值,所述控制系统加载并执行:
12.步骤1,通过pwm模块发出驱动信号,驱动信号经过隔离电路、驱动电路驱动开关功能无触点开关元件通断,以实现降压斩波;
13.步骤2,控制系统通过adc模块采集电磁抱闸电源的输出电压,并将电磁抱闸电源的电压输出值与所述设定的输出电压给定值进行比较,若不相等则通过修改pwm占空比方式以使输出电压维持在给定值上。
14.当控制系统收到风机主控制器发出的低压切换信号时,修改维持抱闸运行的输出电压给定值,所述控制系统加载并执行所述步骤1和步骤2。
15.所述控制系统加载并执行还包括:
16.控制系统将采集的电磁抱闸电源的输入电压、输出电压和输出电流与阈值比较,若超出阈值范围则通过pwm模块发出驱动信号,驱动信号经过隔离电路与驱动电路驱动保护功能无触点开关元件切断电流。
17.当控制系统收到风机主控制器发出的抬升启动电压信号时,修改启动抱闸的输出电压给定值,所述控制系统的加载并执行所述步骤1和步骤2,直至抱闸启动。
18.当控制系统收到风机主控制器发出的停止信号时,所述控制系统的加载并执行还包括:调整pwm占空比直至电磁抱闸电源的输出电压为0v。
19.本实用新型所述基于buck电路拓扑结构的电磁抱闸电源,通过设置控制系统、以及与控制系统连接的隔离电路、驱动电路、电压检测电路、电路检测电路、比较器、保护功能无触点开关元件和开关功能无触点开关元件,可以实现高压启动抱闸、低压维持抱闸运行,节能并延长抱闸寿命。通过两个无触点开关元件可以有效保护抱闸,使得电磁抱闸电源更加安全可靠。当抱闸因长期运行而发生磨损时,控制系统会自动提高启动功率,确保抱闸正常运行,减小维护成本,延长抱闸使用寿命。
附图说明
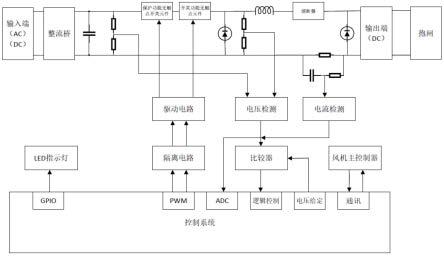
20.图1为本实施例所述基于buck电路拓扑结构的电磁抱闸电源的电路结构框图;
21.图2为图1所示电磁抱闸电源中控制系统的主循环流程示意图。
具体实施方式
22.下面,结合附图对本实用新型进行详细描述。
23.如图1所示,本实施例提供了一种基于buck电路拓扑结构的电磁抱闸电源,包括:整流桥、控制系统、以及与控制系统中pwm模块连接的隔离电路、与控制系统中adc模块连接的用于检测整流桥输出电压的电压检测电路、与控制系统中adc模块连接的用于检测整流桥输出电流的电流检测电路、与控制系统中逻辑控制模块及电压给定信号连接的比较器、与控制系统中通讯模块连接的风机主控制器,所述隔离电路的输出端与驱动电路连接、所述驱动电路的输出端分别与保护功能无触点开关元件和开关功能无触点开关元件连接,保护功能无触点开关元件和开关功能无触点开关元件彼此串联后保护功能无触点开关元件
的一端与整流桥的正极输出端连接,开关功能无触点开关元件的一端为电磁抱闸电源的正极输出端,整流桥的负极输出端为电磁抱闸电源的负极输出端,比较器的输入端与电压检测模块的输出端连接。电磁抱闸电源的负载为抱闸,抱闸接到电磁抱闸电源的正极输出端和电磁抱闸电源的负极输出端。本实施例所述风机为风力发电机。
24.本实施例中控制系统包含有控制芯片及其外围电路,其中控制芯片可以是stm32g03控制芯片、或者dspf28335控制芯片、或者stm32f1 03控制芯片。通过adc模块采集电磁抱闸电源的输出侧电压、电流,从而实现输出电压的闭环控制,并可通过软件检测电压、电流,实现过压过流保护。通过风机主控制器反馈信号自适应调整抱闸启动功率,从而满足抱闸的长期运行。
25.上述电磁抱闸电源是基于buck电路拓扑结构实现,结合图1和图2,详细描述其具体的4个工作状态及功能:
26.1、高压启动状态:在电源前端输入高压,此时控制系统处于等待状态,控制系统等待风机主控制器信号从而切换到抱闸高压启动模式,如果控制系统收到风机主控制器启动信号,控制系统通过pwm(pulse-width modulation,脉冲宽度调制)模块发出pwm信号,输入电压经过开关功能无触点开关元件斩波降压后,以及通过电压检测电路采集所述电磁抱闸电源的后端输出电压,通过反馈闭环调整控制系统发出的pwm占空比,以使输出电压稳定在抱闸启动电压。
27.2、高低压切换功能:在抱闸被启动后,为了达到节能效果,风机主控制器经过一段时间计时后,通知控制系统调整pwm占空比降低电压,并通过电压检测电路和比较器将输出电压稳定在抱闸运行所需的维持电压。从而极大节省电能,同时延长抱闸寿命。
28.3、双无触点开关元件串联保护功能:本实施例采用两个无触点开关元件串联的结构,即将前端元件为保护功能无触点开关元件和后端元件为开关功能无触点开关元件这两个开关元件串联起来,当后端元件发生故障而失控时,仍可通过控制前端元件切断电流,保护抱闸。当所述电磁抱闸电源接收到风机主控制器的急停信号时,可以随时停止向抱闸输入电压。电磁抱闸电源中的控制系统具备adc采集功能,采集前后端电压与电流信息,当采集到的电压电流信息超出限定值时也会进入故障急停状态。故障急停状态下,控制系统封锁pwm信号,同时发出一个关闭信号使开关元件前端的保护元件断开,避免开关元件因短路而失控的现象。
29.4、自适应修改启动功率功能。当抱闸由于长期使用而出现磨损时,启动抱闸所需功率往往要比正常状态偏大,控制系统可通过风机主控制器检测风机各参数,向控制系统反馈抱闸是否正常启动。当抱闸因磨损而未正常动作时,控制系统将提高给定启动电压,则在高压启动状态下,电磁抱闸电源输出端电压会稳定在更高的给定电压上,确保抱闸正常动作,从而满足抱闸的长期稳定使用。
30.以启动电压180v,维持电压48v的抱闸为例,结合图1、图2,描述本实施例所述基于buck电路拓扑结构的电磁抱闸电源运行全过程:
31.系统运行时,输入端接入直流或交流电源,电源经过整流桥后变为直流电,由于整流桥的设计,本电源兼容交直流输入。输出直流电经过保护功能无触点开关元件和后端元件为开关功能无触点开关元件,电流波形受这两个开关元件,本实施例这两个开关元件为为mos管控制,此时由于控制系统pwm处于封锁状态,输出端无电压输出。
32.控制系统上电后,先由adc模块检测输入端电压是否满足启动要求,当电压满足要求时,系统进入wait等待状态,等待风机主控制器发出“启动抱闸”命令,即dsp(digital signal processing,数字信号处理器)启动信号,dsp信号由风机主控制器通过通讯接口发送给控制系统。
33.当控制系统接收到风机主控制器的指令后,由wait等待状态切换到run_high高压运行状态,将180v电压设定为输出电压给定值,此时控制系统将通过pwm模块,发出一定频率的驱动信号,驱动信号经过隔离电路与驱动电路驱动开关元件通断,利用斩波电路的工作原理,实现降压斩波。为保证输出电压稳定可靠,控制系统会将adc采集电压值与给定值在比较器中作比较,当采样值与给定值不相等时,通过修改pmm占空比以使输出电压维持在180v。在该状态下,系统循环扫描风机主控制器是否发出“低压切换”信号。
34.如果抱闸老化,180v启动电压不足以启动抱闸时,风机主控制器通过检测主电路状态,可查询到当前抱闸是否启动。当控制系统已经输出启动电压而抱闸实际未动作时,风机主控制器通过反馈控制系统“启动电压不足”信号,收到该信号后控制系统将抬升“启动电压”,修改电压给定值,此时电源输出高于180v电压,电压会持续缓慢上升直至抱闸动作。
35.当控制系统接收到风机主控制器发出的“低压切换”信号时,工作状态切换为run_low低压运行状态,控制系统将48v电压设定为输出电压给定值,与run_high高压状态相似,控制系统通过pwm模块发出信号驱动开关元件输出48v电压,并通过adc采集模块闭环控制输出电压为给定值。
36.控制系统每次更新pwm信号后,会再次通adc模块采集电压和电流,并判断当前输入电压、输出电压、输出电流是否在阈值范围内,当上述物理量超出阈值范围,控制系统将进入fault故障状态,此状态下电路封锁pwm信号,启动保护功能无触点开关元件,切断电流,并进行系统数据初始化,为下次开机做准备。并将控制系统切换到wait等待状态进行待命。
37.控制系统在正常运行过程中,及控制系统处于run_high高压状态、run_low低压状态时,始终可以接收风机主控制器停止信号,即,始终接收风机主控制器发出的dsp信号,始终判断是否接收到dsp停止信号。当风机主控制器发出dsp停止信号时,控制系统会切换到stop停止状态,调整pwm占空比直至输出电压为0v,并将系统切换为wait等待状态进行待命。
38.本实施例所述电磁抱闸电源,在电压切换过程与电压降零过程均为斜坡升降,从而减小电流变化对电磁抱闸电源及负载抱闸的影响。
39.本实施例所述电磁抱闸电源除通过以上功能实现软件故障保护外,还具备熔断器、断路器等硬件保护装置。如图1所示,可以在所述开关功能无触点开关元件的一端串联熔断器后再作为电磁抱闸电源的正极输出端。
40.本实施例所述保护功能无触点开关元件和开关功能无触点开关元件可以是mos管、或者igbt管、或者gtr管。
41.具体的,所述控制系统加载并执行:
42.当控制系统收到风机主控制器发出的启动抱闸信号时,设定启动抱闸的输出电压给定值;
43.步骤1,通过pwm模块发出驱动信号,驱动信号经过隔离电路、驱动电路驱动开关功
能无触点开关元件通断,以实现降压斩波;
44.步骤2,控制系统通过adc模块采集电磁抱闸电源的输出电压,并将电磁抱闸电源的电压输出值与所述设定的输出电压给定值进行比较,若不相等则通过修改pwm占空比方式以使输出电压维持在给定值上。
45.当控制系统收到风机主控制器发出的低压切换信号时,修改维持抱闸运行的输出电压给定值,并执行所述步骤1和步骤2。
46.每次更新pwm信号,控制系统会加载并执行:再次通adc模块采集电压和电流,控制系统将采集的电磁抱闸电源的输入电压、输出电压和输出电流与阈值比较,若超出阈值范围则通过pwm模块发出驱动信号,驱动信号经过隔离电路与驱动电路驱动保护功能无触点开关元件切断电流。
47.当抱闸老化,控制系统收到风机主控制器发出的抬升启动电压信号时,控制系统会加载并执行:修改启动抱闸的输出电压给定值,并执行所述步骤1和步骤2,直至抱闸启动。
48.当风机主控制器发出停止信号时,所述控制系统的加载并执行:调整pwm占空比直至电磁抱闸电源的输出电压为0v。
49.本实用新型的目的在于创造性的提出一种智能、节电、安全的电磁机械抱闸电源,该电源能够实现输出电压的切换,从而解决耗能问题;可以根据抱闸当前磨损状态,自适应修改启动功率,电压切换坡度可调,从而延长抱闸使用寿命;可以实现输出端电压电流检测,从而使得电源具备良好的软硬件保护功能,并可有效的保护后端抱闸及其他设备。可以根据抱闸具体需要切换电压,从而实现抱闸电路在高压启动后能够在较低的维持电压运行,以此达到低功耗的节能目的,极大的减少了能源的浪费,节约成本。
50.综上所述,本实施例所述基于buck电路拓扑结构的电磁抱闸电源,通过设置控制系统及与控制系统连接的隔离电路、驱动电路、电压检测电路、电路检测电路、比较器、以及保护功能无触点开关元件和开关功能无触点开关元件,可以实现高压启动抱闸、低压维持抱闸运行,节能并延长抱闸寿命。通过两个无触点开关元件可以有效保护抱闸,使得电磁抱闸电源更加安全可靠。当抱闸因长期运行而发生磨损时,控制系统会自动提高启动功率,确保抱闸正常运行,减小维护成本,延长抱闸使用寿命。
51.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1