一种35kVPT手车辅助摇出装置的制作方法
一种35kv pt手车辅助摇出装置
技术领域
1.本发明涉及输变电电力设备检修技术领域,具体涉及一种35kv pt手车辅助摇出装置。
背景技术:
2.手车是可抽出式开关柜中的主要部件,一般有pt手车和开关(断路器)手车两种,手车又叫小车,以开关手车为例,在开关分断的情况下,铺上导轨后可用手将其从开关柜中抽出,以便进行检修或更换。可能因能用手拉出,且形状类似手推车,所以就叫做手车,手车上的主要元件有断路器、互感器等一次电气设备,手车的种类有很多,其中35kv pt手车的重量大,需要使用辅助摇出装置辅助将手车摇出,因此,本发明提出一种35kv pt手车辅助摇出装置。
3.现有技术中,提出了公开号为cn210137126u,公开日为2020年03月10日的中国专利文件,来解决上述技术问题,该专利文献所公开的技术方案如下:一种高压开关柜手车便携式辅助装置,其包括支撑架和遥控器,支撑架两端通过伸缩机构连接有工业吸盘,支撑架上设置有电机,电机的转轴通过减速器连接伸长杆,伸长杆贯穿支撑架,且支撑架的端部设置有连接件,连接件上开设有六角孔;电机与控制器电连接,控制器通过无线收发模块与遥控器无线连接。
4.为了解决人工操作手车摇进摇出存在安全风险的问题,现有技术是采用工业吸盘、连接件相互配合的方式进行处理,但是还会出现仅仅依靠连接件和吸盘对手车把手进行吸附连接不够稳定的情况,进而导致手车满载时重量大容易出现倾倒对辅助操作人员造成危险的问题。
技术实现要素:
5.本发明提供一种35kv pt手车辅助摇出装置,以解决上述背景技术中提出的问题。
6.为解决上述技术问题,本发明所采用的技术方案是:
7.一种35kv pt手车辅助摇出装置,包括pt手车辅助摇出装置主体,所述pt手车辅助摇出装置主体的底部设置有超低叉车,所述超低叉车的上方设置有辅助摇出机构,所述辅助摇出机构的外侧设置有手车把固定机构;所述辅助摇出机构包括有限位底座单元和运动控制单元,所述限位底座单元设置在超低叉车的货叉上端,所述运动控制单元设置在限位底座单元的上表面;所述手车把固定机构包括有手车把手吸附单元和手车把手固定单元,所述手车把手吸附单元设置在运动控制单元的外侧表面上方,所述手车把手固定单元设置在手车把手吸附单元的下方。
8.本发明技术方案的进一步改进在于:所述限位底座单元包括有下表面通过螺栓螺母与超低叉车货叉表面固定安装的底座,所述底座的前端固定安装有与手车把手轨道相适配的卡位板,超低叉车使pt手车辅助摇出装置主体便于进行位置调节和移动且降低底座的重心,避免手车在摇进摇出时因为重心不稳出现倾倒,提高pt手车辅助摇出装置主体的安
全性。
9.本发明技术方案的进一步改进在于:所述限位底座单元还包括有对称固定在底座上表面两侧的手车轮槽,所述手车轮槽的尺寸与手车的底盘车尺寸相适配,两组所述手车轮槽的内侧设置有限位导轨,所述限位导轨的下表面与底座的上表面固定连接,底座通过卡位板的辅助定位功能实现精准与手车的轨道进行对应固定,操作简单。
10.本发明技术方案的进一步改进在于:所述运动控制单元包括有固定安装在底座上表面一侧的运动控制组件,所述运动控制组件包括有安装在运动控制组件控制端的运动伺服电机,所述运动伺服电机的输出轴固定安装有滚珠丝杆,所述滚珠丝杆的前端与底座的上表面前端转动连接,运动控制组件中部的运动伺服电机驱动滚珠丝杆转动。
11.本发明技术方案的进一步改进在于:所述运动控制单元还包括有设置在底座上表面的支架,所述支架的下端中部固定安装有螺纹安装焊接块,所述螺纹安装焊接块的内壁与滚珠丝杆的外表面螺纹连接,所述支架的下端与限位导轨的上表面滑动连接,支架在限位导轨限位作用下前移向手车靠近。
12.本发明技术方案的进一步改进在于:所述手车把手吸附单元包括有固定安装在支架顶部中部的真空电子吸盘,所述真空电子吸盘的输出端固定安装有弹性吸盘柱,所述弹性吸盘柱的高度与手车把手高度相适配,真空电子吸盘驱动弹性吸盘柱将手车把手进行吸附固定实现手车把手与支架固定。
13.本发明技术方案的进一步改进在于:所述手车把手固定单元包括有固定安装在支架外侧表面的拉锁弹性装置安装架,所述拉锁弹性装置安装架的两侧通过螺栓螺母对称固定安装有拉锁弹性装置,所述拉锁弹性装置安装架的中部固定安装有拉伸滑轮,运动伺服电机反向转动使支架回移实现手车随着支架整体进行同步移动被拉出开关柜,整体的稳定性很高,不容易出现倾倒的问题。
14.本发明技术方案的进一步改进在于:所述拉伸滑轮的上方相对应的位置设置有定滑轮,所述定滑轮的侧表面与支架的外侧表面上方固定连接,所述定滑轮的一侧设置有插销卡位组件,所述插销卡位组件的外侧表面与支架的外侧表面上方固定连接,所述插销卡位组件的内部活动安装有活动插销,所述活动插销靠近定滑轮的一端设置有拉锁钢丝安装孔,所述定滑轮、拉伸滑轮与两组所述拉锁弹性装置之间通过钢丝绕动连接,所述钢丝的前端与活动插销的钢丝安装孔固定安装,通过拨动活动插销拉动钢丝索,利用拉伸滑轮与定滑轮的相互配合实现插销卡位组件的前端的锁合器转动插入手车把手侧壁的凹槽中,插销卡位组件与活动插销相互配合进行卡位使拉锁弹性装置对手车把手的固定,使手车把手不容易脱把造成危险。
15.由于采用了上述技术方案,本发明相对现有技术来说,取得的技术进步是:
16.1、本发明提供一种35kv pt手车辅助摇出装置,超低叉车使pt手车辅助摇出装置主体便于进行位置调节和移动且降低底座的重心,避免手车在摇进摇出时因为重心不稳出现倾倒,提高pt手车辅助摇出装置主体的安全性,底座通过卡位板的辅助定位功能实现精准与手车的轨道进行对应固定,操作简单。
17.2、本发明提供一种35kv pt手车辅助摇出装置,运动控制组件中部的运动伺服电机驱动滚珠丝杆转动,支架在限位导轨限位作用下前移向手车靠近,真空电子吸盘驱动弹性吸盘柱将手车把手进行吸附固定实现手车把手与支架固定,运动伺服电机反向转动使支
架回移实现手车随着支架整体进行同步移动被拉出开关柜,整体的稳定性很高,不容易出现倾倒的问题。
18.3、本发明提供一种35kv pt手车辅助摇出装置,通过拨动活动插销拉动钢丝索,利用拉伸滑轮与定滑轮的相互配合实现插销卡位组件的前端的锁合器转动插入手车把手侧壁的凹槽中,插销卡位组件与活动插销相互配合进行卡位使拉锁弹性装置对手车把手的固定,使手车把手不容易脱把造成危险,提高装置的安全性。
附图说明
19.图1为本发明的结构俯视示意图;
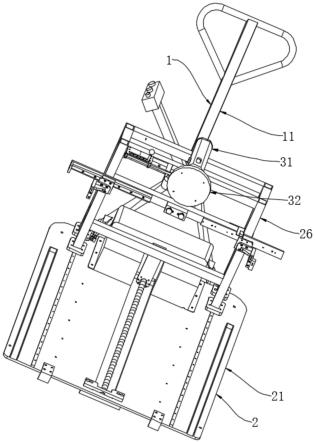
20.图2为本发明的结构立体示意图;
21.图3为本发明的结构侧视示意图;
22.图4为本发明的结构运动伺服电机与滚珠丝杆示意图。
23.图5为本发明的结构手车把固定机构示意图;
24.图6为本发明的结构真空电子吸盘与弹性吸盘柱示意图。
25.图中:1、pt手车辅助摇出装置主体;11、超低叉车;2、辅助摇出机构;21、底座;22、卡位板;23、手车轮槽;24、限位导轨;25、运动控制组件;251、运动伺服电机;252、滚珠丝杆;26、支架;261、螺纹安装焊接块;3、手车把固定机构;31、真空电子吸盘;32、弹性吸盘柱;33、拉锁弹性装置安装架;34、拉伸滑轮;341、定滑轮;35、拉锁弹性装置;36、插销卡位组件;361、活动插销。
具体实施方式
26.下面结合实施例对本发明做进一步详细说明:
27.实施例1
28.如图1-6所示,本发明提供了一种35kv pt手车辅助摇出装置,包括pt手车辅助摇出装置主体1,pt手车辅助摇出装置主体1的底部设置有超低叉车11,超低叉车11的上方设置有辅助摇出机构2,辅助摇出机构2的外侧设置有手车把固定机构3;辅助摇出机构2包括有限位底座单元和运动控制单元,限位底座单元设置在超低叉车11的货叉上端,运动控制单元设置在限位底座单元的上表面;手车把固定机构3包括有手车把手吸附单元和手车把手固定单元,手车把手吸附单元设置在运动控制单元的外侧表面上方,手车把手固定单元设置在手车把手吸附单元的下方,超低叉车11使pt手车辅助摇出装置主体1便于进行位置调节和移动且降低底座21的重心,避免手车在摇进摇出时因为重心不稳出现倾倒,提高pt手车辅助摇出装置主体1的安全性。
29.实施例2
30.如图1-6所示,在实施例1的基础上,本发明提供一种技术方案:限位底座单元包括有下表面通过螺栓螺母与超低叉车11货叉表面固定安装的底座21,底座21的前端固定安装有与手车把手轨道相适配的卡位板22,限位底座单元还包括有对称固定在底座21上表面两侧的手车轮槽23,手车轮槽23的尺寸与手车的底盘车尺寸相适配,两组手车轮槽23的内侧设置有限位导轨24,限位导轨24的下表面与底座21的上表面固定连接,底座21通过卡位板22的辅助定位功能实现精准与手车的轨道进行对应固定,操作简单,运动控制组件25中部
的运动伺服电机251驱动滚珠丝杆252转动,支架26在限位导轨24限位作用下前移向手车靠近。
31.实施例3
32.如图1-6所示,在实施例1的基础上,本发明提供一种技术方案:运动控制单元包括有固定安装在底座21上表面一侧的运动控制组件25,运动控制组件25包括有安装在运动控制组件25控制端的运动伺服电机251,运动伺服电机251的输出轴固定安装有滚珠丝杆252,滚珠丝杆252的前端与底座21的上表面前端转动连接,运动控制单元还包括有设置在底座21上表面的支架26,支架26的下端中部固定安装有螺纹安装焊接块261,螺纹安装焊接块261的内壁与滚珠丝杆252的外表面螺纹连接,支架26的下端与限位导轨24的上表面滑动连接,真空电子吸盘31驱动弹性吸盘柱32将手车把手进行吸附固定实现手车把手与支架26固定,运动伺服电机251反向转动使支架26回移实现手车随着支架26整体进行同步移动被拉出开关柜,整体的稳定性很高,不容易出现倾倒的问题。
33.实施例4
34.如图1-6所示,在实施例1的基础上,本发明提供一种技术方案:手车把手吸附单元包括有固定安装在支架26顶部中部的真空电子吸盘31,真空电子吸盘31的输出端固定安装有弹性吸盘柱32,弹性吸盘柱32的高度与手车把手高度相适配,手车把手固定单元包括有固定安装在支架26外侧表面的拉锁弹性装置安装架33,拉锁弹性装置安装架33的两侧通过螺栓螺母对称固定安装有拉锁弹性装置35,拉锁弹性装置安装架33的中部固定安装有拉伸滑轮34,拉伸滑轮34的上方相对应的位置设置有定滑轮341,定滑轮341的侧表面与支架26的外侧表面上方固定连接,定滑轮341的一侧设置有插销卡位组件36,插销卡位组件36的外侧表面与支架26的外侧表面上方固定连接,插销卡位组件36的内部活动安装有活动插销361,活动插销361靠近定滑轮341的一端设置有拉锁钢丝安装孔,定滑轮341、拉伸滑轮34与两组拉锁弹性装置35之间通过钢丝绕动连接,钢丝的前端与活动插销361的钢丝安装孔固定安装,通过拨动活动插销361拉动钢丝索,利用拉伸滑轮34与定滑轮341的相互配合实现插销卡位组件36的前端的锁合器转动插入手车把手侧壁的凹槽中,插销卡位组件36与活动插销361相互配合进行卡位使拉锁弹性装置35对手车把手的固定,使手车把手不容易脱把造成危险,提高装置的安全性。
35.下面具体说一下该35kv pt手车辅助摇出装置的工作原理。
36.如图1-6所示,首先,底座21通过卡位板22的辅助定位功能实现精准与手车的轨道进行对应固定,运动控制组件25中部的运动伺服电机251驱动滚珠丝杆252转动,支架26在限位导轨24限位作用下前移向手车靠近,然后,真空电子吸盘31驱动弹性吸盘柱32将手车把手进行吸附固定实现手车把手与支架26固定,拨动活动插销361拉动钢丝索,利用拉伸滑轮34与定滑轮341的相互配合实现插销卡位组件36的前端的锁合器转动插入手车把手侧壁的凹槽中,插销卡位组件36与活动插销361相互配合进行卡位使拉锁弹性装置35对手车把手的固定,最后,运动伺服电机251反向转动使支架26回移实现手车随着支架26整体进行同步移动被拉出开关柜。
37.上文一般性的对本发明做了详尽的描述,但在本发明基础上,可以对之做一些修改或改进,这对于技术领域的一般技术人员是显而易见的。因此,在不脱离本发明思想精神的修改或改进,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1