一种电压源风电机组柔性并网控制方法
本发明属于电力控制,具体涉及一种电压源风电机组柔性并网控制方法。
背景技术:
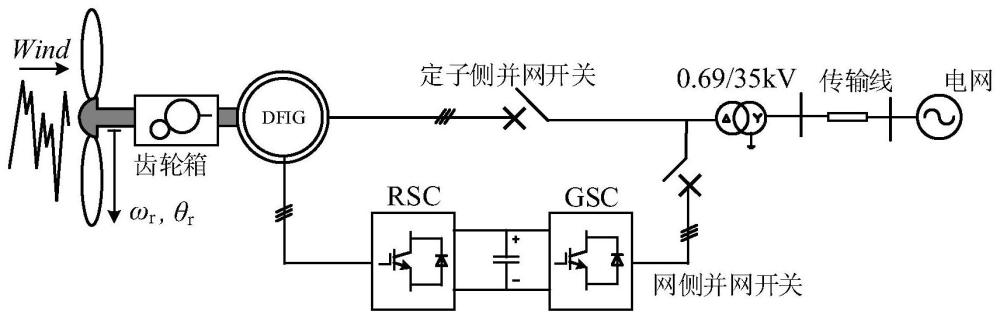
1、大型风力发电机组通过变流器接入电网,相比传统的同步发电机,具有控制灵活、响应迅速等优点。但是由于变流器的隔离作用,机组对电网缺少必要的惯量和频率阻尼。对于双馈风电机组(doubly-fed induction generator,dfig),定子直接挂接电网,转子通过三相交-直-交变流器实现交流励磁;电功率通过定子、转子与电网进行交换。由于风电变流器采用双闭环控制,电网频率的变化并不会体现在控制策略中,因此不会对风机的转速产生影响,无法利用转子的旋转动能为系统提供惯量支撑。
2、随着风电渗透率的增加,传统同步发电机在电力系统中所占比例逐渐降低。在此大背景下,风电机组无法参与电网频率调节这一问题,将引发严重的频率稳定问题。一旦电网频率变化超过限额时,将会导致电网切除电源和负荷,甚至引发严重的停电事故。因此使双馈风电机组取得和同步发电机类似的惯量和阻尼特性,体现“电网友好型”并网发电特性,显得尤为重要。
3、现有常规的双馈风电机组电压源控制方式中,不论是转子侧变换器虚拟同步控制方式,还是网侧变换器惯性同步控制方式,均是针对风电机组稳态运行时的控制方案。但在双馈电压源风电机组的柔性并网启动领域,目前仍缺乏有针对性的柔性并网启动控制策略。而如果不设计特定的柔性并网控制策略,直接采取强行并行并网启动的话;则会在并网瞬间产生巨大的冲击电流,对电力系统的稳定运行产生巨大负面影响。
技术实现思路
1、针对现有技术中存在的不足,本发明提供了一种电压源风电机组柔性并网控制方法,实现电压源双馈风电机组的柔性并网控制效果,减少并网瞬间的冲击电流。
2、本发明通过以下技术手段实现上述技术目的。
3、一种电压源风电机组柔性并网控制方法:包括网侧变换器柔性并网控制和转子侧变换器柔性并网控制,其中先进行网侧变换器柔性并网控制,具体为控制网侧变换器与电网同步并对直流母线预充电,为转子侧变换器的柔性并网控制提供条件;之后进行转子侧变换器柔性并网控制,具体为控制风电机组的转子侧变换器,使定子侧电压满足并网条件。
4、进一步地,所述网侧变换器柔性并网控制为在网侧变换器惯性同步控制的基础上,增加预同步控制,用于控制网侧变换器的输出电压幅值、频率、相位与电网同步;
5、所述转子侧变换器柔性并网控制包括预同步控制、有功功率控制和无功功率控制;其中转子侧变换器预同步控制为控制风电机组定子电压幅值、频率、相位与电网同步;转子侧变换器有功功率控制为模拟同步发电机的转子运动方程,将虚拟惯量和虚拟阻尼引入控制环路;转子侧变换器无功功率控制为通过pi控制器对转子侧变换器无功功率的无差精准控制。
6、进一步地,所述网侧变换器柔性并网控制中,预同步控制为:
7、初始时,常量1输入积分器ωb/s,电网电压q轴分量ugq输入pi控制器,由所述积分器ωb/s与所述pi控制器两者结果相加得到网侧变换器电压源控制相角θisyn;
8、预充电与同步完成后,切换为将直流母线电压udc输入积分器ωb/s,并将所述积分器ωb/s结果与常量0相加,得到网侧变换器电压源控制相角θisyn。
9、进一步地,所述网侧变换器柔性并网控制还包括无功功率控制:网侧变换器无功功率给定值qg*与实际值qg之差输入pi控制器,所述pi控制器结果与额定调制比mn以及直流母线电压udc相加,得到网侧变换器的调制比m*;
10、上述调制比m*与预同步控制中得到的电压源控制相角θisyn共同输入svpwm模块,生成脉冲控制信号sgabc控制网侧变换器运行。
11、进一步地,所述转子侧变换器无功功率控制为:转子磁链d轴分量给定值ψrd*与实际值ψrd之差输入pi控制器,得到反坐标变换的输入umd;转子磁链q轴分量给定值ψrq*与实际值ψrq之差输入到pi控制器,得到反坐标变换的输入umq;
12、其中初始时ψrd*的取值为转子磁链启动阶段的给定值ψrd_ini;与电网的相角同步完成后,定子侧无功功率给定值qs*与实际值qs之差输入pi控制器,所得结果作为ψrd*的取值。
13、进一步地,所述转子侧变换器有功功率控制为:电磁转矩给定值te*与实际值te做差得到转矩差δte,虚拟同步角速度ωvsg与电网实际频率ωg之差乘以虚拟惯量系数dvsg得到虚拟惯量偏差δd;转矩差δte与虚拟惯量偏差δd的差值输入积分器1/2hvsgs得到虚拟同步角速度ωvsg,虚拟同步角速度ωvsg输入积分器ωb/s得到虚拟转矩相角θte。
14、进一步地,所述转子侧预同步控制为:将虚拟转子角θvsg与转子角θr做差,得到滑差角θslip;
15、其中,初始时定子电压q轴分量usq输入pi控制器,所得结果与虚拟转矩相角θte相加,得到虚拟转子角θvsg;与电网的相角同步完成后,切换为常量0与虚拟转矩相角θte相加,得到虚拟转子角θvsg。
16、进一步地,所述转子侧变换器柔性并网控制中,将umd、umq和θslip输入反坐标变换,所得结果输入svpwm模块,生成脉冲控制信号srabc控制转子侧变换器运行。
17、进一步地,包括以下步骤:
18、步骤1,风电机组转速稳定在并网转速后,闭合网侧并网开关,网侧变换器进行预同步控制和无功功率控制,其中预同步控制中,常量1输入积分器ωb/s,电网电压q轴分量ugq输入pi控制器,上述积分器ωb/s与pi控制器两者结果相加,得到网侧变换器电压源控制相角θisyn;无功功率控制中,网侧变换器无功功率给定值qg*与实际值qg之差输入pi控制器,所得结果与额定调制比mn以及直流母线电压udc相加,得到网侧变换器的调制比m*;
19、步骤2,网侧变换器直流侧的直流电压udc预充电以及网侧变换器的输出电压与电网电压之间的同步完成后,网侧变换器切换至电压源控制策略,其中预同步控制中切换为将直流母线电压udc输入积分器ωb/s,所得结果与常量0相加,得到网侧变换器电压源控制相角θisyn;无功功率控制保持不变;
20、步骤3,网侧变换器柔性并网控制完成后,转子侧变换器开始与电网同步;其中无功功率控制中,将转子磁链启动阶段的给定值ψrd_ini作为转子磁链d轴分量给定值ψrd*的取值,之后取ψrd*与实际的转子磁链d轴分量ψrd之差输入pi控制器,得到反坐标变换的输入umd,将转子磁链q轴分量给定值ψrq*与实际值ψrq之差输入到pi控制器,得到反坐标变换的输入umq;有功功率控制中,电磁转矩给定值te*与实际值te做差得到转矩差δte,虚拟同步角速度ωvsg与电网实际频率ωg之差乘以虚拟惯量系数dvsg得到虚拟惯量偏差δd,转矩差δte与虚拟惯量偏差δd的差值输入积分器1/2hvsgs得到虚拟同步角速度ωvsg,虚拟同步角速度ωvsg输入积分器ωb/s得到虚拟转矩相角θte;预同步控制中,定子电压q轴分量usq输入pi控制器,所得结果与虚拟转矩相角θte相加,得到虚拟转子角θvsg,虚拟转子角θvsg与转子角θr做差,得到滑差角θslip。
21、步骤4,与电网的相角同步完成后,闭合定子侧并网开关进行柔性并网,其中无功功率控制中,切换为将定子侧无功功率给定值qs*与实际值qs之差输入pi控制器,所得结果作为转子磁链d轴分量给定值ψrd*的取值,其余保持步骤3不变;有功功率控制保持步骤3不变;预同步控制中,切换为将常量0与虚拟转矩相角θte相加,得到虚拟转子角θvsg。
22、进一步地,电网电压ug基于θisyn进行从abc坐标系转换到dq坐标系,其中q轴分量为ugq,d轴分量为ugd;
23、转子电流ir基于滑差角θslip做abc至dq的坐标系转换,之后进行磁链计算得到发电机转子磁链的d轴分量ψrd和q轴分量ψrq;定子电压us基于滑差角θslip做abc至dq的坐标系转换,得到其d轴分量usd和q轴分量usq。
24、本发明的有益效果为:
25、(1)本发明提供了一种电压源风电机组柔性并网控制方法,其中通过重新设计网侧变换器的控制策略,有效减小了网侧变换器并网时的冲击电流;通过重新设计转子侧变换器的控制策略,减小转子侧变换器并网时的冲击电流。最终通过重新渗剂并网控制逻辑,当满足电压源风电机组并网条件时闭合并网开关,与现有控制方式相比,能够显著减小并网瞬间所出现的并网冲击电流,成功实现柔性并网发电。
26、(2)本发明网侧变换器控制策略中,通过引入预同步控制,以控制网侧变换器的输出电压和电网电压的幅值、频率、相位均相同,实现与电网同步。
27、(3)本发明转子侧变换器控制策略中,通过预同步控制使风电机组定子电压幅值、频率、相位与电网同步;通过有功功率控制模拟同步发电机的转子运动方程,将虚拟惯量和虚拟阻尼引入控制环路;最后无功功率控制,则利用pi控制器对转子侧变换器无功功率的无差精准控制。
- 还没有人留言评论。精彩留言会获得点赞!