一种变电站远程智能巡视装置及巡视方法与流程
本发明涉及变电站远程监管,具体涉及一种变电站远程智能巡视装置及巡视方法。
背景技术:
1、随着近年来电网系统的飞快发展,电力设备也随之快速增多,以往采用人工进行巡视,以预先发现变电站设备发生异常的方式逐渐被放弃,人工巡视的频率和效率均无法满足现有的变电站巡视需求;因此现有的变电站大多采取远程巡视的方式,远程巡视最先采取的在变电站周围预测监控点,实现多点布控的方式,但是多点布控的方式存在一些缺陷,例如,监控摄像头的监控区域固定,若相邻两监控区域之间未保证最大的覆盖状态,则会发生过多监控盲区,存在巡视漏洞;若需要缩小两监控区域之间的交叉状态,但却又导致重叠面积增加,监控摄像头的数量耗费过多,从而出现两难的局面。
2、为此,随着远程智能技术的进步,无人机和自动巡视装置作为补充手段,对监控盲区进行补充巡视,达到既能够不增加过多监控摄像头耗费的同时,也尽可能的弥补了监控漏洞;但是还存在一些缺陷;例如,采用自动巡视装置进行巡视时,一般需要都携带蓄能电池,因此需要在巡视里程达到设定值时,就需要进行充电,一旦充电不及时则会导致自动巡视装置断电停摆或者失连,在室外区域如何对自动巡视装置进行自动充电就显得尤为重要。
技术实现思路
1、本发明的目的在于提供一种变电站远程智能巡视装置及巡视方法,解决以上技术问题。
2、本发明的目的可以通过以下技术方案实现:
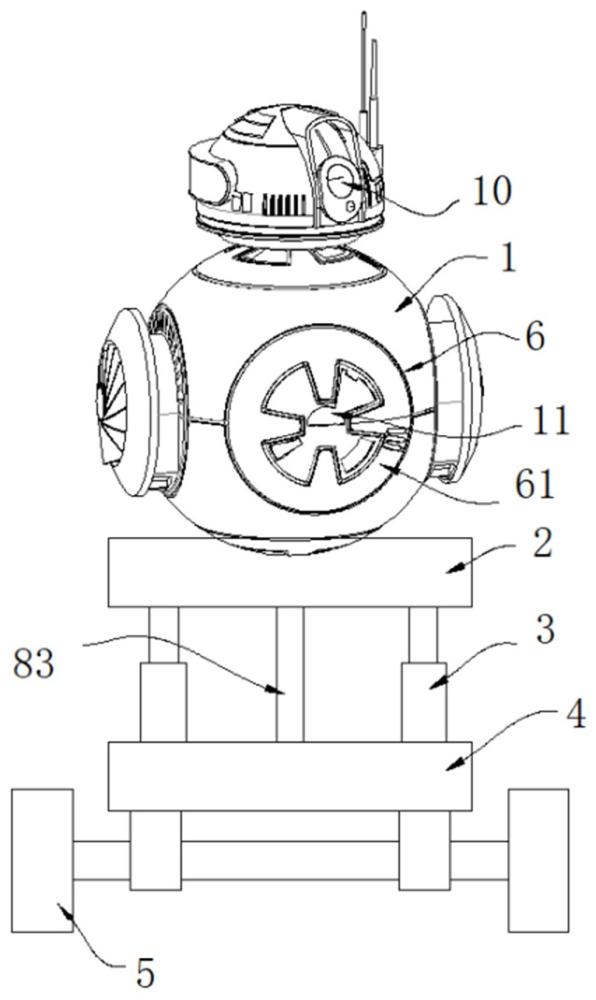
3、一种变电站远程智能巡视装置,包括巡视机器人,所述巡视机器人安装在所述支撑台上,所述支撑台底部通过伸缩气缸安装有承载台,所述承载台底部安装有自行走机构;
4、所述支撑台一侧设置有电池仓,所述电池仓内安装有蓄能电池,所述蓄能电池为所述巡视机器人和自行走机构进行供电;所述电池仓外侧壁上设置有充电接头,所述巡视机器人上安装有巡视模块,对行进路线上的周围区域进行巡视,所述支撑台内部设置有控制模块,所述控制模块用于控制所述巡视机器人执行巡视任务以及自行走机构行进;
5、在地面上安装有紧急补充电能机构,所述紧急补充电能机构用于室外环境下对蓄电池进行补充电能。
6、作为进一步的技术方案,所述紧急补充电能机构包括:
7、路面轨道,所述路面轨道环绕铺设在变电站设备处,所述路面轨道的上端面与路面齐平,所述路面轨道内部设置有多个无线充电模块,所述承载台底部设置有无线接收模块,所述无线接收模块与所述蓄电池电性连接,所述路面轨道上设置有遮挡组件。
8、作为进一步的技术方案,所述遮挡组件包括:
9、封板,所述封板与所述路面轨道的轨槽截面相吻合,并与所述路面轨道上端面齐平,所述路面轨道的内底壁上分布有多个自动升降杆,所述自动升降杆的一端与所述封板的底面活动连接,另一端固定安装在所述路面轨道的内底面上。
10、作为进一步的技术方案,所述封板采用多段分板体拼合而成,所述分板体其中一端开设有活动槽口,所述活动槽口的槽底处转动连接有转轴,所述转轴上套设有复位扭簧,所述转轴固定连接在活动盖板的端部,在初始状态下,所述活动盖板正好填补整个活动槽口;在受冲击作用下,活动盖板向下偏转以露出活动槽口;所述无线充电模块位于所述活动槽口的下方。
11、作为进一步的技术方案,所述支撑台底部设置有定位组件,所述定位组件包括:容纳槽,所述容纳槽开设在所述支撑台底部,所述容纳槽内固定安装有自动伸缩杆,所述自动伸缩杆至少设置有两个且对称分布在所述支撑台容纳槽内,所述自动伸缩杆的底端共同固定连接在滑动座上表面,所述滑动座下表面设置成凹型槽,所述凹型槽内滑动连接着无线接收模块;所述无线接收模块顶部固定安装有连杆,所述连杆上穿所述滑动座和承载台后与所述支撑台底部固定连接。
12、作为进一步的技术方案,所述活动盖板上安装有角度传感器,所述角度传感器用于识别所述活动盖板的偏转角度,所述承载台底部还设置有自动对中组件,所述自动对中组件用于将承载台中心与所述封板进行对正。
13、作为进一步的技术方案,所述自动对中组件包括:夹爪,所述夹爪底端设置成尖角,且该尖角向上翘起,所述夹爪设置有两个,两个夹爪对称分布在所述承载台上,且所述承载台上开设有通槽,两个所述夹爪的顶部向上穿出通槽后通过连接件进行连接,所述夹爪与所述通槽铰接连接,所述封板两侧面上均开设有与尖角相适配的卡槽,所述封板的边缘处均设置有倒角,所述卡槽设置成顶端向上倾斜的结构,所述连接件用于推动两夹爪底部的尖角向中部合拢。
14、作为进一步的技术方案,所述连接件至少设置有一个,所述连接件包括外套筒,所述外套筒采用橡胶材质制成,且所述外套筒内串有通电弹簧,所述通电弹簧的两端分别固定在两个夹爪的顶部上,所述通电弹簧与蓄电池电性连接。
15、作为进一步的技术方案,所述巡视模块包括摄像总成、通信模块、红外测温仪、温湿度传感器,所述摄像总成用于采集巡视路径上的环境信息,所述通信模块用于远程通信和数据传递,所述红外测温仪用于检测是否有温度异常的情况。
16、一种变电站远程智能巡视方法,该巡视方法步骤如下:
17、步骤一:工作人员通过远程终端制定巡视机器人的巡视路线,并控制巡视机器人和自行走机构工作,执行变电站巡视任务;
18、步骤二:在巡视过程中,通过巡视模块对巡视路线周围的环境情况进行实现监控,一旦发现异常,则反馈给远程终端,远程终端对异常情况进行分通知工作人员,工作人员进行对应异常情况的排查和维修工作;
19、步骤三:当巡视机器人在巡视过程中遇到突然缺电的情况,则尽快将巡视机器人移动至路面轨道处,根据巡视机器人所处的位置,利用紧急补充电能机构中的自动升降杆向上顶起,控制分板体转变为倾斜状态,在巡视机器人的自身重力作用下沿分板体滑动至端头处,此时承载台底部的无线接收模块与无线接收模块对应,实现对巡视机器人的无线充电,待电能补充后,巡视机器人回到充电桩处进行深度充电,充电后继续执行巡视任务。
20、本发明的有益效果:
21、(1)本发明在冬季寒冷季节,室外的温度角度,蓄电池的续航能力显著下降,为了预防因在室外进行巡视过程中突发没电的情况,因此本发明在巡视地面上安装了多个紧急补充电能机构,让巡视机器人能够快速到达附近紧急补充电能机构处,为巡视机器人进行紧急补电,以维持巡视机器人回到充电桩位置进行深度充电做应急处理,避免蓄电池耗尽电力却无法回到设定充电桩的情况,也能够缓解因蓄电池完全放电后蓄电能力的下降情况;
22、(2)本发明利用滑动座在自重作用下向下伸展,对活动盖板进行冲击,使得活动盖板克服复位扭簧而向下偏转,从而露出下方的无线充电模块,此时无线充电模块与无线接收模块最小距离且中间无其他物品阻挡,充电损耗降低,效率能够进一步提升;而活动盖板的设置能够在闲置状态下自动复位,从而对无线充电模块进行保护。
23、附图说明
24、下面结合附图对本发明作进一步的说明。
25、图1为本发明的整体三维示意图;
26、图2为本发明中定位组件和自动对中组件的结构示意图;
27、图3为本发明中紧急补充电能机构的分布示意图;
28、图4为本发明中紧急补充电能机构的三维结构示意图;
29、图5为本发明中路面轨槽内部的结构示意图;
30、图6为本发明巡视方法的步骤图。
- 还没有人留言评论。精彩留言会获得点赞!