连续脉冲注入和高阶锁相的永磁同步电机带速重投方法
本发明涉及永磁同步电机控制领域,特别涉及一种连续脉冲注入和高阶锁相的永磁同步电机带速重投方法。
背景技术:
1、永磁同步电机因其高功率密度、高效率、强过载能力等优点,在工业、交通、家电等领域应用越来越广泛。尤其是永磁同步电机无位置传感器控制技术受到了广泛的关注。通常的无位置传感器控制启动策略一般都研究电机静止状态的快速、可靠启动,通常采用高频注入法或者位置观测器实现初始位置的估计,从而实现准确、无反转平滑启动。但是,在风机、水泵、油泵等应用场合下,特别是一些大惯量应用领域,如工业风机、地铁、轨道交通等一般要求电机系统在掉电几十毫秒至电压恢复供电后,能快速投入工作而不是减速至零后,再从零速重新启动。这个过程又称作带速重投。例如文献《restart strategy forsensorless pmsm drive with single zero voltage vector in railway application》(f.du,j.li.and g.li,ieee international symposium on sensorless control forelectrical drives(sled),2023,pp.1-7.)采用了单零矢量电压脉冲的方法,利用旋转坐标系电流幅值估计掉电后的转速,但是文中没有给出单脉冲具体的作用时间。文献《universal restart strategy for high-inertia scalar-controlled pmsm drives》(k.lee,s.ahmed and s.m.lukic,ieee transactions on industry applications,vol.52,no.5,pp.4001-4009,sept.-oct.2016.)采用了两个零矢量电压脉冲的方法,但是估计的转速与位置误差较大。文献《restart strategy for sensorless pmsm drivesystem based on zero-voltage vector》(chen b,shen a,li p,et al,iet electricpower applications,2020,14(12):2362-2369.)提出了一种双反馈回路的连续零电压矢量脉冲法,通过设计一个闭环将电流幅值保持在一定参考值来调节零电压矢量脉冲的作用时间,设计传统二阶锁相环跟踪转子的位置。但是,该方法在电机转速快速变化时,会存在较大的位置和速度跟踪误差。且由于控制了电压矢量作用时间,会减小电流采样信噪比,降低位置跟踪精度。中国专利《一种永磁同步电机无位置传感器控制带速重投方法》(吴春,黄希,陈子豪,申请号:201811188488.x)提供了一种可实现在电机转子具有正反转初速度情况下的带速重投方法,但是该方法需要增加测量端电压的硬件电路,增加了系统成本。
技术实现思路
1、为了克服现有技术的不足,改善使用传统二阶锁相环在转速快速变化时位置和转速跟踪性能,同时提高电流采样信噪比,解决带速重投过程中电流振荡和转矩波动大的问题,本发明给出了一种连续零矢量脉冲注入和高阶锁相的永磁同步电机带速重投方法,首先施加第一个短路电压脉冲,通过电流过采样技术,连续多次采集相电流并计算电流幅值的平均值。当电流幅值超过设定的最大值时,记录当前所用时间并应用到后续的脉冲。若电流幅值没有超过设定最大值,则短路脉冲会继续直到作用到默认设置的时间或者超过设定的电流幅值最大值。然后,将连续且固定时间的短路脉冲注入后,通过电流过采样方法得到αβ轴电流,设计三阶锁相环对电流相位进行锁相,实现转子位置和转速的跟踪。本发明所给出的方法可以避免过长短路脉冲产生的大电流冲击,通过持续施加窄短路脉冲及对小电流的电流过采样,避免了带速重投过程电流和转矩的脉动,提高了电流采样信噪比,增强了系统带速重投过程的可靠性。
2、本发明所采用的技术方案如下:
3、一种连续脉冲注入和高阶锁相的永磁同步电机带速重投方法,包括以下步骤:
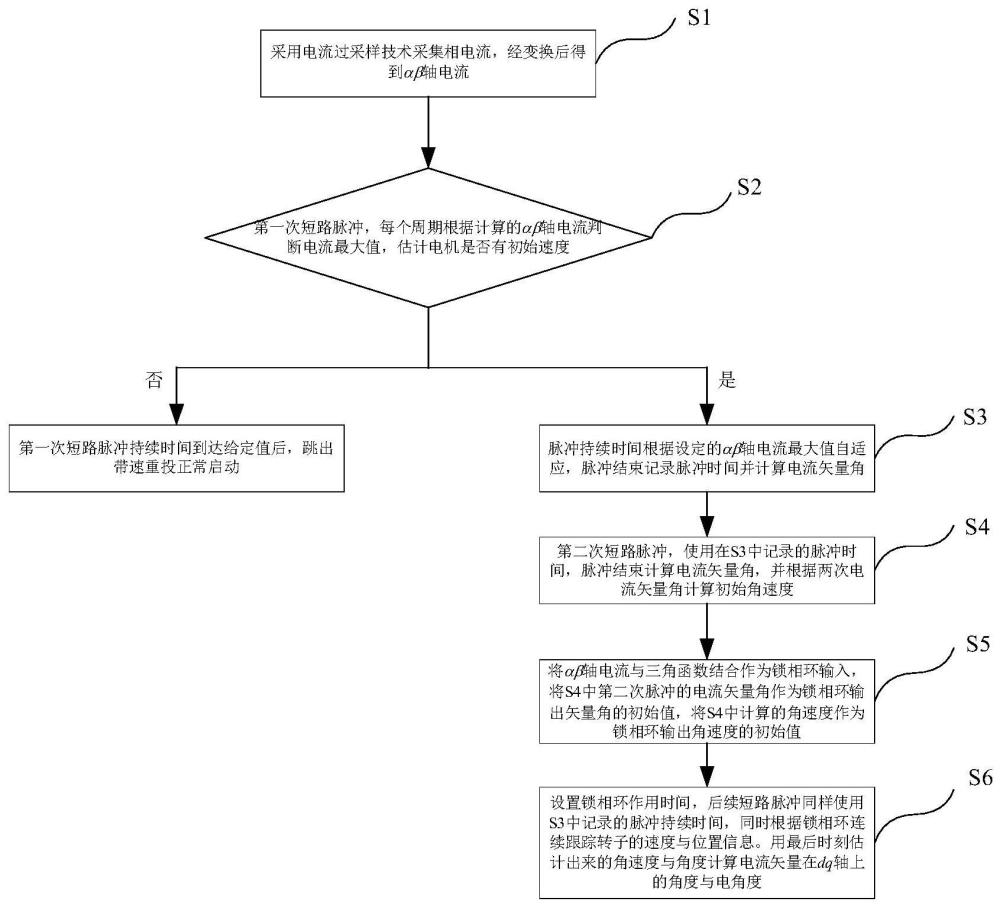
4、步骤1)采用电流过采样技术,施加第一次短路脉冲,采集三相电流,再变换后得到αβ轴电流;
5、步骤2)根据设置的默认脉冲持续时间与电流最大值,在第一次短路脉冲时,每个pwm周期判断电流幅值大小;
6、步骤3)如果电机没有初始速度,短路脉冲产生的电流幅值就会很小,脉冲持续时间会作用到默认设置的时间,第一次脉冲结束后会跳出带速重投进入正常启动过程;
7、如果电机有初始速度,短路脉冲产生的电流幅值随着时间增加会逐渐增大,当达到设置的电流最大值时,第一次短路脉冲结束,计算电流矢量在αβ轴的角度,并记录此时脉冲持续时间;
8、步骤4)等到第二次短路脉冲时,将步骤3)记录的时间作为第二次短路脉冲的持续时间,脉冲结束后同样计算电流在αβ轴的角度,并与步骤3)中计算的矢量角计算角速度;
9、步骤5)αβ轴电流与锁相环的输入有关,将步骤4)中第二次脉冲结束计算的电流矢量角作为锁相环输出矢量角的初始值,并将步骤4)中计算的角速度作为锁相环输出角速度的初始值;
10、步骤6)后续的短路脉冲同样使用步骤3)中记录的脉冲持续时间,同时根据锁相环连续跟踪转子的速度与位置信息,待所有脉冲作用结束,计算电角度。
11、进一步,所述步骤1)中,零电压矢量脉冲作用下电机在dq轴上的电压简化为:
12、
13、经过laplace变换,dq轴电流简化为:
14、
15、式中,p代表微分算子,ud,uq代表dq轴电压,id,iq代表dq轴电流,ld,lq代表dq轴电感,ωe代表电角速度,ψf代表永磁体磁链;
16、对相电流过采样后有:
17、
18、式中,iaavg,ibavg分别代表对a、b相电流过采样n次后的平均值;电流在αβ轴的角度计算如下:
19、
20、
21、式中,iα,iβ代表αβ轴的电流,θi代表电流矢量在α、β轴的角度。再进一步,所述步骤3)中,在电机没有初始速度的情况下:
22、t=t0(6)
23、式中,t代表实际脉冲持续时间,t0代表默认设置的脉冲持续时间;在电机有初始速度的情况下,根据式(2)dq轴电流计算电流幅值,再作相应变换得:
24、
25、此时只需要对电流过采样保证采样精度,就可以根据新的采样配置和逻辑记录到合适的脉冲持续时间:
26、t=t1(8)
27、式中,is代表电流幅值,t1代表根据电流幅值记录的脉冲持续时间。更进一步,所述步骤4)中,初始角速度的计算如下:
28、
29、电流在dq轴上的角度计算如下:
30、
31、式中,θi1,θi2分别代表第一次与第二次短路脉冲结束电流矢量在αβ轴上的角度,θ0代表电流矢量在dq轴的角度,ω0代表估计的初始角速度,δt代表θi1与θi2之间的间隔时间。
32、所述步骤5)中,由于
33、
34、式中,θi代表实际的角度,代表锁相环跟踪的角度;
35、当足够小时,式(11)等效为故将作为锁相环的输入;为了减小电流冲击,使锁相环可以快速收敛,将第二次短路脉冲计算的电流矢量角作为输出的初始值,将前两次脉冲计算的角速度ω0作为输出角速度的初始值。
36、所述步骤6)中,根据高阶锁相环的传递函数为:
37、
38、式中,kp1,kp,ki分别代表高阶锁相环的三个可调参数,ξ代表阻尼比,ωn代表自然角频率,k代表极点的调节系数;
39、然后根据极点的配置设置合适的参数,为了保证电流幅值稳定,后续的短路脉冲均使用步骤(3)中记录的脉冲时间,同时锁相环连续跟踪转子的速度与位置信息待所有脉冲作用结束,根据锁相环最后跟踪的电流矢量在αβ轴上的角度与电流矢量在dq轴上的角度以及电流矢量在不同坐标系上的关系计算电角度。
40、本发明的有益效果主要表现在:
41、(1)、方法不涉及复杂的运算过程,采用电流过采样技术提高了对小电流信号的采样精度,改善了小电流受噪声影响大的问题;
42、(2)、通过控制短路脉冲宽度,控制了电流大小,避免因为产生的大电流对系统产生较大冲击;
43、(3)、采用多脉冲连续角度估计,减小了由于脉冲次数少导致的估计误差;
44、(4)、利用高阶锁相环的快速跟踪特性,实现电机快速加、减速过程中速度、位置的准确跟踪,有效避免了带速重投过程电流和转矩的波动。
- 还没有人留言评论。精彩留言会获得点赞!