控制柜和相关的插入式控制设备的制作方法
1.本发明涉及一种用于至少一个电驱动控制器的控制柜。本发明还涉及一种相关的插入式控制设备。
背景技术:
2.由专利文献ep2797396a2已知一种特别是工业机器人的控制柜,其具有壳体、至少一个布置在壳体内部的电气和/或电子组件和机电储能器,该蓄能器具有电动马达和可转动安装的飞轮,该飞轮可通过电动马达转动并且被设计用于产生气流以冷却所述至少一个电气和/或电子组件。
3.由专利文献wo2018/138041a1已知一种用于利用风扇所产生的冷却气流来冷却机器人控制装置的电气组件的冷却装置,该冷却装置具有用于第一电气组件的第一容纳空间、用于第二电气元件的第二容纳空间和将第一容纳空间与第二容纳空间流动技术分开地冷却体壁,该冷却体壁具有面向第一容纳空间的第一分隔壁表面和相对置的、面向冷却体壁的中间空间的第二分隔壁表面,该第二分隔壁表面配设有形成至少一个流动通道的冷却壁凸出部,并且该冷却体壁具有冷却空气通孔,该冷却空气通孔被构造为,将由冷却装置的至少一个风扇所输送的冷却气流从第一容纳空间穿过冷却体壁输送到中间空间中。
技术实现要素:
4.本发明的目的是提供一种控制柜,其对于插入到控制柜中的插入式控制设备具有更好的冷却效果。本发明的另一目的是提供一种具有可靠冷却效果的插入式控制设备,其可以简单且快速地安装在这样的控制柜中。
5.根据本发明的目的通过一种用于至少一个电驱动控制器的控制柜来实现,该控制柜包括:
[0006]-控制柜壳体,
[0007]-构造在控制柜壳体中的第一机柜室,其具有至少一个用于新鲜空气的进气口、至少一个第一转移开口、和将所述至少一个进气口与所述至少一个第一转移开口流动技术连接的新鲜空气通道,
[0008]-构造在控制柜壳体中的第二机柜室,其具有至少一个用于排气的出气口、至少一个第二转移开口、和将所述至少一个出气口与所述至少一个第二转移开口流动技术连接的排气通道,以及
[0009]-构造在控制柜壳体中的第三机柜室,其相对于第一机柜室、第二机柜室和控制柜外部环境被流动技术地密封,
[0010]
其中,控制柜壳体具有将第三机柜室与第一机柜室和第二机柜室流动技术隔开的分隔壁,该分隔壁具有所述至少一个第一转移开口和所述至少一个第二转移开口,并且第三机柜室被构造为具有至少一个抽屉的机架,其中每个抽屉被构造用于接纳插入式控制设备。
[0011]
在驱动技术中并且特别是在机器人技术中,变频器用于操作马达,例如永磁同步电机(permanent erregte synchronmaschinen)。为了实现适当的保护级别(ip),变频器通常与控制器一起安装在控制柜中。对于较大的操纵器或工业机器人来说,变频器中会产生较大的热损失,其必须以合适的方式从控制柜中导出。
[0012]
由于换热器的散热量相当大并且还可能导致变频器中温度升高,因此变频器通常是以“贯穿技术(durchsteck-technik)”安装在控制柜中。然而,控制柜在此需要一个具有适当切口的后壁。通过该切口,变频器将其冷却体悬挂在外部冷却气道中,以便将热量直接输送到外部。
[0013]
虽然这种布置在技术上很容易实现,但是它有几个缺点。由于冷却体在高马达电流和/或功率的情况下需要较大的基面,因此通常必须将变频器用螺栓直立地拧紧在后壁上。由于重量大并且是远远地安装在机柜后面,因此很难基于人体工程学进行更换。由于自然对流,冷却空气通常是从下向上吹过冷却体。亦即,安装在机柜更高位置的变频器会从低位置的变频器处接收已预热的空气,并且不再能够很好地去热。在多机器人控制柜的情况下,这种竖直安装会很快导致机柜非常高且深度较小。这大大增加了控制柜倾倒的危险。
[0014]
通过本发明,可以根据需要单独或组合地实现以下改进:
[0015]
简单、快速且符合人体工程学的可更换的控制器(插入式控制设备),以便缩短设置时间(einrichtungszeit)。可以形成紧凑、节省空间的结构和可伸缩的(skalierbar)系统。可以大大地简化安装。
[0016]
为了实现本发明的目的,可以使用具有多个插入格的机架式机柜。带有集成变频器的控制模块(即,插入式控制设备)例如可以简单地且符合人体工程学地被水平推入到各个插入格中并被机械地固定。控制模块具有内置的冷却体,可选地位于上部、中部或下部,并带有可调节的风扇,并且被机械地压靠在机柜侧壁中的合适的密封唇上,其中,模块的空气入口通过开口从新鲜空气通道中抽吸冷空气,通过u形的冷却体压迫冷空气,最后通过第二开口将热量释放到排气通道中。
[0017]
通过所述模块的空气引导,ip保护等级的密封边界不再是平坦地位于机柜壁上,而是延伸通过模块,即,模块中的冷却体相对于其余的模块被密封并且满足相应的ip保护等级。
[0018]
模块的机械锁紧可以通过无工具的快速封闭来实现,该快速封闭不仅提供了与新鲜空气通道和排气通道的密封连接,还同时提供了针对用于供电的模块的电接触,以及其它的连接,例如镇流电阻。
[0019]
通过这样有效的布置,不仅使控制器的更换非常简单、快速且符合人体工程学,而且还可以实现非常紧凑的控制器插入,可以将多个控制器相叠地布置在可伸缩的机架式机柜中。通过利用侧壁中的两个独立的竖直空气通道所进行的巧妙的空气引导,使得安装在更高位置的控制器也能够得到冷的新鲜空气,并且不会被下面的控制器额外地加热。这使得各个插入件几乎是彼此热独立的。
[0020]
除了机器人控制器以外,所述抽屉还可以用于其它的插入件,例如附加轴模块(即变频器没有控制器),用于外围设备和客户装配的插入框架,或者用于机柜内部空间的冷却设备。在此,冷却设备冷却了机柜内部空间的空气,并将废热(类似于机器人控制器地)排放到侧面的空气通道。
[0021]
客户也可以购买不带机柜的控制模块,并且将其安装在自己的用户定制的机柜中。在此,可以使用所提出技术方案的模块,并且通过新鲜空气管道和排气管道非常灵活地集成在现有的客户机柜设计中。
[0022]
分隔壁可以在邻接的第一机柜室的表面区域中、分别在抽屉的高度上具有至少一个单独的第一转移开口,该第一转移开口在其面向相应抽屉的一侧具有第一密封法兰,该第一密封法兰被构造为,在插入式控制设备的插入相应的抽屉中并锁紧的布置中是气密地贴靠在该插入式控制设备上的吸入口的对应的第一密封配对法兰上。
[0023]
分隔壁可以在邻接的第二机柜室的表面区域中、分别在抽屉的高度上具有至少一个单独的第二转移开口,该第二转移开口在其面向相应抽屉的一侧具有第二密封法兰,该第二密封法兰被构造为,在插入式控制设备的插入相应的抽屉中并锁紧的布置中是气密地贴靠在该插入式控制设备上的吹出口的对应的第二密封配对法兰上。
[0024]
第一密封法兰、第一密封配对法兰、第二密封法兰和/或第二密封配对法兰可以分别具有至少一个密封唇。
[0025]
在第二机柜室内部可以布置至少一个制动电阻。一个或多个制动电阻可以用于将通过使插入式控制设备所操控的例如机器人臂的运动减速而因为电动马达进入发电运行所回收的电能转化为热量。
[0026]
在第一机柜室与第二机柜室之间的分隔壁的与第三机柜室相对置的一侧上可以构造线缆通道,其中分隔壁在该线缆通道的表面区域中具有电连接器,该电连接器在插接侧以朝向第三机柜室的方向布置,以便被插入并锁紧在第三机柜室中的插入式控制设备的对应的电配对连接件与该电连接器相接触。
[0027]
第三机柜室的每个抽屉可以具有滑动导向件,该滑动导向件被构造为,将插入到各个抽屉中的插入式控制设备可移动地安放在锁紧位置与解锁位置之间,其中,插入式控制设备在锁紧位置上机械地、电地并且冷空气流动技术地连接到控制柜;插入式控制设备在解锁位置上机械地、电地并且冷空气流动技术地从控制柜脱开并且可以从控制柜被手动拉出。
[0028]
第三机柜室的每个抽屉可以具有可手动调节的锁紧杠杆,该锁紧杠杆被构造为,将安装在各个抽屉中的插入式控制设备选择性地从解锁位置移动到锁紧位置和/或从锁紧位置移动到解锁位置。
[0029]
本发明的目的还通过一种插入式控制设备来实现,该插入式控制设备被构造为,将插入式控制设备插入到根据一或多种前述实施方式所述的控制柜的第三机柜室的抽屉中,其中插入式控制设备可以是机器人的电驱动控制器、附加轴驱动设备、制冷设备或用于附加设备的外围插入框架。
[0030]
插入式控制设备可以具有闩锁装置,该闩锁装置被构造为,与控制柜的锁紧杠杆协作,将锁紧杠杆的运动转换成插入式控制设备在抽屉内部的滑移运动,从而通过锁紧杠杆关于插入式控制设备的闩锁装置的运动,使安装在相应抽屉中的插入式控制设备选择性地从解锁位置运动到锁紧位置和/或从锁紧位置运动到解锁位置。
附图说明
[0031]
下面将参照附图对本发明的具体实施例进行详细说明。这些示例性实施例的具体
特征可以根据需要被单独或组合地考虑作为本发明的一般性特征,而与它们具体在本文中哪里被提到无关。其中:
[0032]
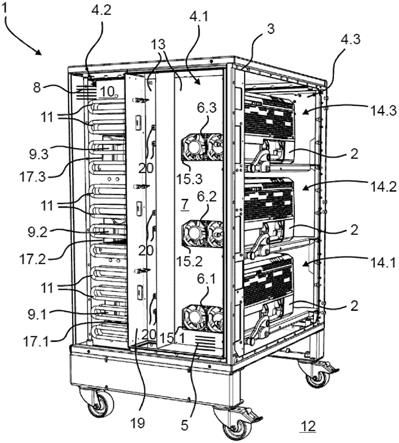
图1示出了根据本发明的控制柜的第一种示例性实施方式的透视图,其具有已插入的插入式控制设备,
[0033]
图2示出了根据图1的控制柜和根据图1的插入式控制设备的示意性剖视图,
[0034]
图3示出了根据本发明的控制柜的第二种变型实施方式的透视图,其具有已插入的插入式控制设备,
[0035]
图4示出了根据图3的控制柜和根据图3的插入式控制设备的示意性剖视图,以及
[0036]
图5示出了在控制柜抽屉中的单个示例性插入式控制设备的放大透视图。
具体实施方式
[0037]
图1和图2示出了控制柜1的第一种示例性实施方式。控制柜1被构造为容纳至少一个电驱动控制器2,如图5中所示。
[0038]
控制柜1具有控制柜壳体3。
[0039]
在控制柜壳体3中构造有第一机柜室4.1,第一机柜室具有至少一个用于新鲜空气的进气口5、至少一个(在当前实施例的情况下为刚好三个)第一转移开口6.1、6.2、6.3和将所述至少一个进气口5与所述至少一个第一转移开口6.1、6.2、6.3流动技术连接的新鲜空气通道7。进气口5集成在封闭第一机柜室4.1的遮盖挡板中,该遮盖挡板在图1中为了清楚起见被移除,尽管遮盖挡板未被示出,但是通过水平的虚线示意性示出了进气口5的位置。
[0040]
在控制柜壳体3中还构造有第二机柜室4.2,该第二机柜室具有至少一个用于排气的出气口8、至少一个(在当前实施例的情况下刚好三个)第二转移开口9.1、9.2、9.3和将所述至少一个出气口8与所述至少一个第二转移开口9.1、9.2、9.3流动技术连接的排气通道10。出气口8集成在封闭第二机柜室4.2的遮盖挡板中,该遮盖挡板在图1中为了清楚起见被移除,尽管遮盖挡板未被示出,但是通过水平线示意性示出了出气口8的位置。
[0041]
在本实施例中,在第二机柜室4.2的内部布置有多个制动电阻11。
[0042]
此外,在控制柜壳体3中还构造有第三机柜室4.3,第三机柜室相对于第一机柜室4.1、第二机柜室4.2和控制柜1外部的环境12被流动技术地密封。
[0043]
控制柜壳体3还具有将第三机柜室4.3与第一机柜室4.1和第二机柜室4.2流体技术隔开的分隔壁13,该分隔壁具有第一转移开口6.1、6.2、6.3和第二转移开口9.1、9.2、9.3,其中第三机柜室4.3被构造为具有至少一个抽屉14.1、14.2的机架,在当前实施例中具有刚好三个抽屉14.1、14.2、14.3,其中每个抽屉14.1、14.2、14.3被构造为用于容纳插入式控制设备2。
[0044]
在根据图1和图2的第一种实施方式中以及在根据图3和图4的第二种实施方式中,分隔壁13在邻接的第一机柜室4.1的表面区域中、分别在抽屉14.1、14.2、14.3的高度上具有单独的第一转移开口6.1、6.2、6.3,这些第一转移开口在其面向相应的抽屉14.1、14.2、14.3的一侧具有第一密封法兰15.1、15.2、15.3,这些第一密封法兰被构造为,在将插入式控制设备2插入相应的抽屉14.1、14.2、14.3中并锁紧的布置中,气密地贴靠在插入式控制设备2上的抽吸开口的对应的第一密封配对法兰16.1、16.2、16.3上。
[0045]
根据图3和图4的第二种实施方式与根据图1和图2的第一种实施方式的不同之处
特别在于:第一种实施方式只有唯一一个进气口5(图1),其使新鲜空气流入新鲜空气通道7中,使得新鲜空气在那里像烟囱一样被分配到三个第一转移开口6.1,6.2,6.3;在第二种实施方式中,则是为三个转移开口6.1,6.2,6.3中的每一个都分配有自己的独立进气口5(图3)。这种分配是通过相应的通道管嘴25实现的,该通道管嘴将各个转移开口6.1、6.2、6.3与自己的独立进气口5(图3)连接起来。
[0046]
以类似于第一机柜室4.1的第一转移开口6.1、6.2、6.3的方式,分隔壁13在邻接的第二机柜室4.2的表面区域中、分别在抽屉14.1、14.2、14.3的高度上具有单独的第二转移开口9.1、9.2、9.3,这些第二转移开口在其面向相应的抽屉14.1、14.2、14.3的一侧具有第二密封法兰17.1、17.2、17.3,这些第二密封法兰被构造为,在将插入式控制设备2插入相应的抽屉14.1、14.2、14.3中并被锁紧的布置中,气密地贴靠在插入式控制设备2上的吹出口的相应的第二密封配对法兰上。
[0047]
在所示实施例的情况下,在第一机柜室4.1与第二机柜室4.2之间的分隔壁13的与第三机柜室4.3相对置的一侧相应地构造有线缆通道19,其中分隔壁13在该线缆通道19的表面区域中具有电连接器20,该电连接器在插接侧以朝向第三机柜室4.3的方向布置,以便被插入并锁紧在第三机柜室4.3中的插入式控制设备2的对应的电配对连接件可以与该电连接器20相接触。线缆通道19相对于外部空气被密封,特别是在通道管嘴25与(不可见的)侧壁的连接处。根据图3所示的实施方式是有利的,因为其在线缆通道19中提供了更多的空间,从而为附加的安装提供了更多的空间。
[0048]
特别是如图5所示,第三机柜室4.3的每个抽屉14.1、14.2、14.3可以具有滑动导向件21,该滑动导向件被构造为,将插入到各个抽屉14.1、14.2、14.3中的插入式控制设备2可移动地安放在锁紧位置(图5)与解锁位置之间,其中,插入式控制设备2在锁紧位置上机械地、电地并且冷空气流动技术地连接到控制柜1;插入式控制设备2在解锁位置上机械地、电地并且冷空气流动技术地从控制柜1脱开,并且可以被手动地从控制柜1中拉出。为了这种手动地例如向前拉出,插入式控制设备2可以具有把手22。
[0049]
如图5所示,第三机柜室4.3的每个抽屉14.1、14.2、14.3可以具有可手动调节的锁紧杠杆23,该锁紧杠杆被构造为,将安放在相应抽屉14.1、14.2、14.3中的插入式控制设备2选择性地从解锁位置移动到锁紧位置(图5)和/或从锁紧位置(图5)移动到解锁位置,如箭头p的箭头方向所示。
[0050]
插入式控制设备2具有闩锁装置24,该闩锁装置被构造为,与控制柜1的锁紧杠杆23协作,将锁紧杠杆23的运动转换成插入式控制设备2在抽屉14.1、14.2、14.3内部的滑移运动s,从而通过锁紧杠杆23关于插入式控制设备2的闩锁装置2的运动,使安装在各个抽屉14.1、14.2、14.3中的插入式控制设备2选择性地从解锁位置运动到锁紧位置(图5)和/或从锁紧位置(图5)运动到解锁位置。
[0051]
图2和图4分别以粗虚线l示意性示出了一边界,第三机柜室4.3相对于第一机柜室4.1和第二机柜室4.2的密封沿着该边界进行。在第一个实施例的情况下,各个插入式控制设备2的冷却体26是布置在控制板27与变频器28的功率部件之间。根据第一种实施方式的插入式控制设备2因此可以类似于专利文献wo2018/138041a1中所公开的控制设备那样来构造。在第二个实施例的情况下,变频器28的控制板27和功率部件是布置在同一侧,即直接彼此相邻地布置,并且各个插入式控制设备2的冷却体26是在边缘侧,即,布置在变频器28
的功率部件旁边,在与控制板27相对置的一侧。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1