一种补强机上下料自动化设备的制作方法
本发明涉及补强设备,具体的涉及一种补强机上下料自动化设备。
背景技术:
1、电子科技领域高速发展,人们对电子产品的要求越来越高,而在电子产品的设计上对空间的利用率也越来越重视,随之产生了可高效利用空间资源的柔性电路板。柔性电路板是以聚酰亚胺或聚酯薄膜为基材制成的一种具有高度可靠性绝佳的可挠性印刷电路板,简称软板或fpc,具有配线密度高、重量轻、厚度薄、弯折性好的特点,但是柔性电路板也存在一个缺点,即电路板的整体刚性不够,在使用时某些部位无法达到使用要求,这就需要将补强片贴于该些部位从而增加刚性,因此补强设备应运而生。
2、目前授权公告号为cn209710437u中国实用新型专利公开了一种全自动上下料补强设备,包括支架,支架上包括上料平台、下料平台、上料机械手、下料机械手和若干个补强装置,料平台、下料平台、上料机械手、下料机械手和两个补强装置位于支架上,上料机械手与下料机械手结构尺寸相同,补强装置包括工作平台、若干个贴附组件和与贴附组件匹配的送料机构,上料机械手将电路板从上料平台移至工作平台,贴附组件将补强材料从送料机构取出并贴附至电路板上,下料机械手将补强后的电路板从工作平台移至下料平台上。
3、上述的补强机虽然能够实现自动化对电路板进行补强加工,但需要人工将待补强的电路板放到上料台,以及人工将下料台上补强后的电路板取走,自动程度不够高;同时,不能实现连续工作,一批物料上完后,需要等待下一批物料到位才能继续工作,中间的时间就浪费了,导致工作效率较低。
技术实现思路
1、为了克服现有的补强机存在自动程度不够高、工作效率较低的问题,本发明提供一种补强机上下料自动化设备。
2、本发明技术方案如下所述:
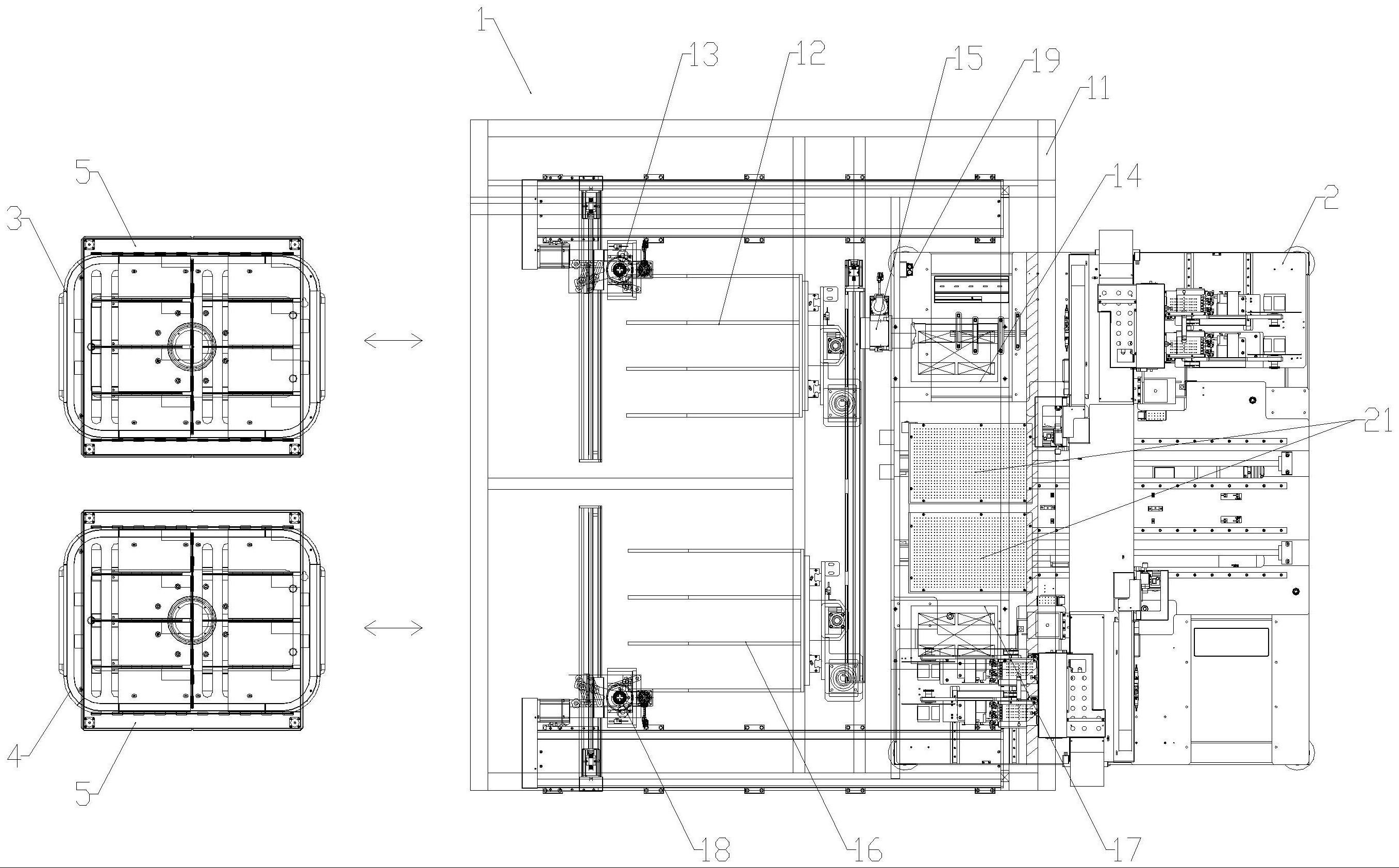
3、一种补强机上下料自动化设备,与补强机对接,包括机架,及设置在所述机架内的上料升降机构、上料转接机械手、上料转接平台、上下料补强机械手、下料升降机构、下料转接平台及下料转接机械手,所述补强机上设置有若干个补强加工工位,所述上料升降机构接收上料agv小车输送过来的满载电路板的载具,并将该载具提升到上料转接工位,所述下料升降机构接收下料agv小车输送过来的空的载具,并将该载具提升到下料转接工位,所述上料转接机械手将位于所述上料转接工位的载具内的电路板转移到所述上料转接平台,所述上下料补强机械手将所述上料转接平台上的电路板转移到其中一个所述补强加工工位进行补强加工,以及将补强后的电路板转移到所述下料转接平台,所述下料转接机械手将所述下料转接平台上补强后的电路板转移到位于所述下料转接工位的载具内。
4、根据上述方案的补强机上下料自动化设备,所述上料升降机构包括上料升降模组和用于托住所述载具的上料载具托架,所述上料升降模组与所述机架连接,所述上料升降模组的活动端与所述上料载具托架连接,并带动所述上料载具托架上下移动。
5、根据上述方案的补强机上下料自动化设备,所述上料转接机械手包括用于吸取所述电路板的上料转接吸盘、用于带动所述上料转接吸盘上下移动的上料转接升降模组、用于带动所述上料转接吸盘横向移动的上料转接横移模组及用于带动所述上料转接吸盘纵向移动的上料转接纵移模组,所述上料转接纵移模组与所述机架连接,所述上料转接纵移模组的活动端与所述上料转接横移模组连接,所述上料转接横移模组的活动端与所述上料转接升降模组连接,所述上料转接升降模组的活动端与所述上料转接吸盘连接。
6、根据上述方案的补强机上下料自动化设备,所述上下料补强机械手包括用于吸取所述电路板的上下料吸盘、用于带动所述上下料吸盘上下移动的上下料升降模组及用于带动所述上下料吸盘横向移动的上下料横移模组,所述上下料横移模组与所述机架连接,所述上下料横移模组的活动端与所述上下料升降模组连接,所述上下料升降模组的活动端与所述上下料吸盘连接。
7、根据上述方案的补强机上下料自动化设备,所述下料升降机构包括下料升降模组和用于托住所述载具的下料载具托架,所述下料升降模组与所述机架连接,所述下料升降模组的活动端与所述下料载具托架连接,并带动所述下料载具托架上下移动。
8、根据上述方案的补强机上下料自动化设备,所述下料转接机械手包括用于吸取所述电路板的下料转接吸盘、用于带动所述下料转接吸盘上下移动的下料转接升降模组、用于带动所述下料转接吸盘横向移动的下料转接横移模组及用于带动所述下料转接吸盘纵向移动的下料转接纵移模组,所述下料转接纵移模组与所述机架连接,所述下料转接纵移模组的活动端与所述下料转接横移模组连接,所述下料转接横移模组的活动端与所述下料转接升降模组连接,所述下料转接升降模组的活动端与所述下料转接吸盘连接。
9、根据上述方案的补强机上下料自动化设备,所述机架的前端设置有供所述上料agv小车进出的上料腔体和供所述下料agv小车进出的下料腔体,所述上料升降机构安装在所述上料腔体内,所述下料升降机构安装在所述下料腔体内。
10、进一步的,所述机架的后端设置有补强工作腔体,所述补强机的前端设置有若干个并排的所述补强加工工位,所述补强机的前端位于所述补强工作腔体内。
11、进一步的,所述上料转接平台和所述下料转接平台的高度一致,所有的所述补强加工工位均位于所述上料转接平台和所述下料转接平台之间。
12、根据上述方案的补强机上下料自动化设备,所述上料转接机械手的运动路径下方设置有ccd相机,当所述上料转接机械手吸取位于所述上料转接工位的载具内的电路板来到所述ccd相机的上方时,所述ccd相机对电路板进行检测定位,检测定位后所述上料转接机械手再将电路板转移到所述上料转接平台。
13、根据上述方案的本发明,本发明的有益效果在于:
14、本发明提供的补强机上下料自动化设备,可以实现对接agv小车和补强机,实现全自动上下料电路板,无需人为搬运,自动化程度更高,解放操作工人的重复机械的工作,提高工作效率,降低成本;上下料机构分开设置,并在补强机补强加工工位附近增加了上下料平台暂存电路板,充分利用了补强需要的时间,从而不影响上下料机构的继续运作,保证了设备能够连续工作,提高工作效率;兼容大小板,且可实现载具内循环收放板;设备上下料转接平台上方设置ccd相机,通过ccd相机可以对电路板进行精确定位,提高在补强机加工工位的精度,进而提高产品的质量。
技术特征:
1.一种补强机上下料自动化设备,与补强机对接,其特征在于,包括机架,及设置在所述机架内的上料升降机构、上料转接机械手、上料转接平台、上下料补强机械手、下料升降机构、下料转接平台及下料转接机械手,所述补强机上设置有若干个补强加工工位,所述上料升降机构接收上料agv小车输送过来的满载电路板的载具,并将该载具提升到上料转接工位,所述下料升降机构接收下料agv小车输送过来的空的载具,并将该载具提升到下料转接工位,所述上料转接机械手将位于所述上料转接工位的载具内的电路板转移到所述上料转接平台,所述上下料补强机械手将所述上料转接平台上的电路板转移到其中一个所述补强加工工位进行补强加工,以及将补强后的电路板转移到所述下料转接平台,所述下料转接机械手将所述下料转接平台上补强后的电路板转移到位于所述下料转接工位的载具内。
2.根据权利要求1所述的补强机上下料自动化设备,其特征在于,所述上料升降机构包括上料升降模组和用于托住所述载具的上料载具托架,所述上料升降模组与所述机架连接,所述上料升降模组的活动端与所述上料载具托架连接,并带动所述上料载具托架上下移动。
3.根据权利要求1所述的补强机上下料自动化设备,其特征在于,所述上料转接机械手包括用于吸取所述电路板的上料转接吸盘、用于带动所述上料转接吸盘上下移动的上料转接升降模组、用于带动所述上料转接吸盘横向移动的上料转接横移模组及用于带动所述上料转接吸盘纵向移动的上料转接纵移模组,所述上料转接纵移模组与所述机架连接,所述上料转接纵移模组的活动端与所述上料转接横移模组连接,所述上料转接横移模组的活动端与所述上料转接升降模组连接,所述上料转接升降模组的活动端与所述上料转接吸盘连接。
4.根据权利要求1所述的补强机上下料自动化设备,其特征在于,所述上下料补强机械手包括用于吸取所述电路板的上下料吸盘、用于带动所述上下料吸盘上下移动的上下料升降模组及用于带动所述上下料吸盘横向移动的上下料横移模组,所述上下料横移模组与所述机架连接,所述上下料横移模组的活动端与所述上下料升降模组连接,所述上下料升降模组的活动端与所述上下料吸盘连接。
5.根据权利要求1所述的补强机上下料自动化设备,其特征在于,所述下料升降机构包括下料升降模组和用于托住所述载具的下料载具托架,所述下料升降模组与所述机架连接,所述下料升降模组的活动端与所述下料载具托架连接,并带动所述下料载具托架上下移动。
6.根据权利要求1所述的补强机上下料自动化设备,其特征在于,所述下料转接机械手包括用于吸取所述电路板的下料转接吸盘、用于带动所述下料转接吸盘上下移动的下料转接升降模组、用于带动所述下料转接吸盘横向移动的下料转接横移模组及用于带动所述下料转接吸盘纵向移动的下料转接纵移模组,所述下料转接纵移模组与所述机架连接,所述下料转接纵移模组的活动端与所述下料转接横移模组连接,所述下料转接横移模组的活动端与所述下料转接升降模组连接,所述下料转接升降模组的活动端与所述下料转接吸盘连接。
7.根据权利要求1所述的补强机上下料自动化设备,其特征在于,所述机架的前端设置有供所述上料agv小车进出的上料腔体和供所述下料agv小车进出的下料腔体,所述上料升降机构安装在所述上料腔体内,所述下料升降机构安装在所述下料腔体内。
8.根据权利要求7所述的补强机上下料自动化设备,其特征在于,所述机架的后端设置有补强工作腔体,所述补强机的前端设置有若干个并排的所述补强加工工位,所述补强机的前端位于所述补强工作腔体内。
9.根据权利要求8所述的补强机上下料自动化设备,其特征在于,所述上料转接平台和所述下料转接平台的高度一致,所有的所述补强加工工位均位于所述上料转接平台和所述下料转接平台之间。
10.根据权利要求1所述的补强机上下料自动化设备,其特征在于,所述上料转接机械手的运动路径下方设置有ccd相机,当所述上料转接机械手吸取位于所述上料转接工位的载具内的电路板来到所述ccd相机的上方时,所述ccd相机对电路板进行检测定位,检测定位后所述上料转接机械手再将电路板转移到所述上料转接平台。
技术总结
本发明公开了一种补强机上下料自动化设备,与补强机对接,包括机架,及设置在所述机架内的上料升降机构、上料转接机械手、上料转接平台、上下料补强机械手、下料升降机构、下料转接平台及下料转接机械手,所述补强机上设置有若干个补强加工工位,补强加工工位用于对电路板进行补强加工。本发明实现了对接AGV小车和补强机,实现全自动上下料电路板,无需人为搬运,自动化程度更高,提高工作效率,降低成本。
技术研发人员:周卿荣,李勇杰,邓娜,江兰娟
受保护的技术使用者:深圳市创新特科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!