一种智能康养机器人控制电路
本发明涉及医疗设备,特别涉及一种智能康养机器人控制电路。
背景技术:
1、随人口老龄化程度加深后养老机构数量不足,居家护理并不专业成了普遍问题,因此提出了智能养老服务,但现有一些智能养老机器人或智能仪器如果将所需功能均进行集成,成本和体积也会相应增加,而实际上一些功能并不会进行使用,而使用需求也会随年龄进行增加或改变,集成是无法保证完全满足需求。
技术实现思路
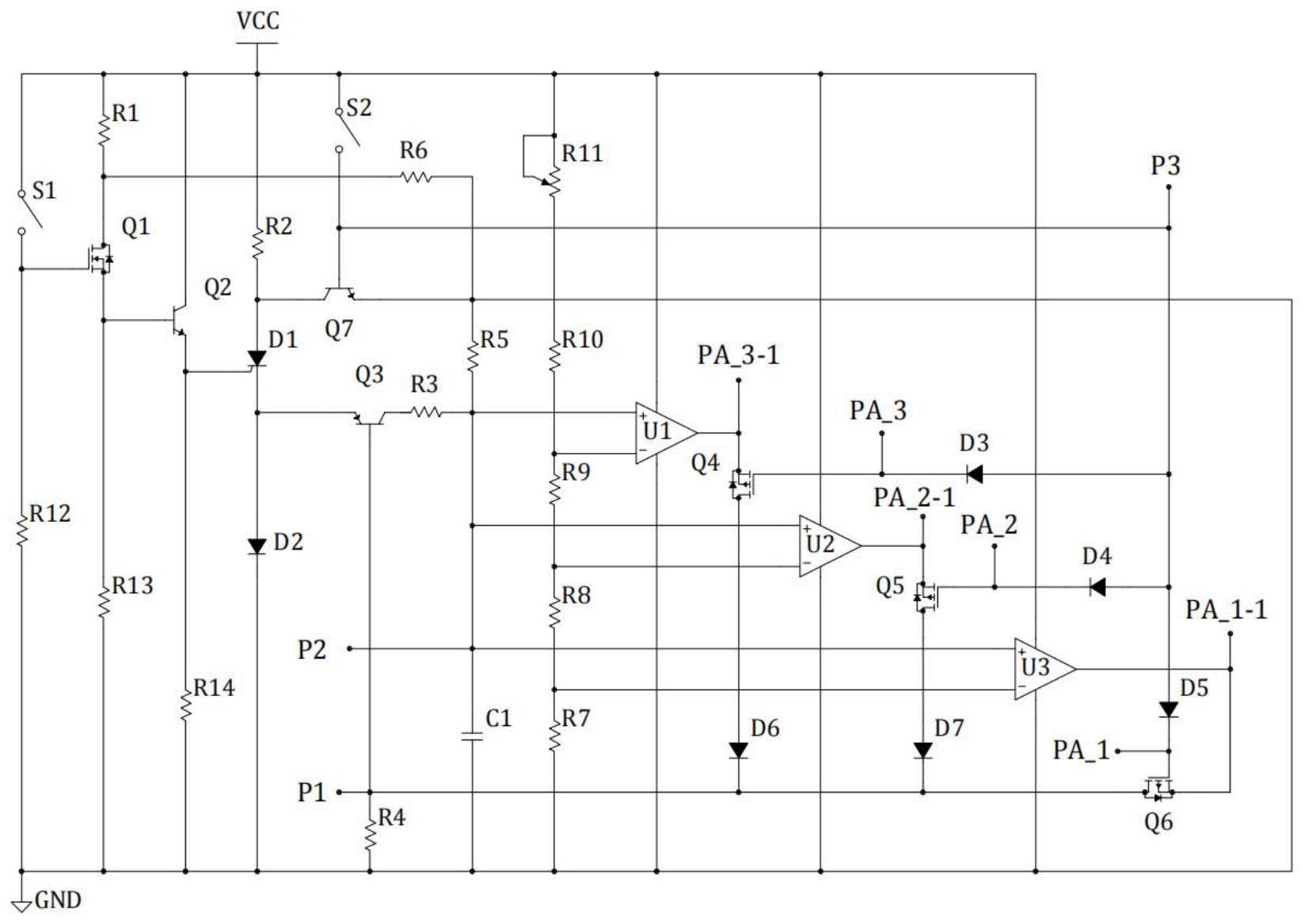
1、针对上述技术问题,本发明的目的是提供一种智能康养机器人控制电路,包括主控单元和外挂单元,所述主控单元包括第一运算放大器u1、第二运算放大器u2、第三运算放大器u3、第一电阻r1、第二电阻r2、第三电阻r3、第四电阻r4、第五电阻r5、第一mos管q1、第二三极管q2、第三三极管q3、第四mos管q4、第五mos管q5、第六mos管q6、第一可控硅d1、第二二极管d2、第一开关s1、第一输出引脚pa_1、第二输出引脚pa_2、第三输出引脚pa_3、第一输入引脚pa_1-1、第二输入引脚pa_2-1、第三输入引脚pa_3-1和第一电容c1,所述第一开关s1一端和第一mos管q1栅极连接,第一mos管q1漏极和第一电阻r1一端连接,第一mos管q1源极和第二三极管q2基极连接,第二三极管q2发射极和第一可控硅d1控制极连接,第一可控硅d1阳极和第二电阻r2一端连接,第一可控硅d1阴极和第二二极管d2阳极、第三三极管q3发射极连接,第三三极管q3基极和第四电阻r4一端连接,第三三极管q3集电极和第三电阻r3一端连接,第三电阻r3另一端和第五电阻r5一端、第一运算放大器u1同相端、第二运算放大器u2同相端、第三运算放大器u3同相端、第一电容c1一端连接,第一运算放大器u1输出端和第四mos管q4源极、第三输入引脚pa_3-1连接,第四mos管q4栅极和第三输出引脚pa_3连接,第二运算放大器u2输出端和第五mos管q5源极、第二输入引脚pa_2-1连接,第五mos管q5栅极和第二输出引脚pa_2连接,第三运算放大器u3输出端和第六mos管q6源极、第一输入引脚pa_1-1连接,第六mos管q6栅极和第一输出引脚pa_1连接,第六mos管q6漏极和第四电阻r4一端连接,第一开关s1另一端、第一电阻r1另一端、第二电阻r2另一端、第二三极管q2集电极和电源连接,第二二极管d2阴极、第四电阻r4另一端、第一电容c1另一端、第五电阻r5另一端和接地端连接。
2、进一步的,所述主控单元还包括,第六电阻r6、第七三极管q7、第三二极管d3、第四二极管d4、第五二极管d5、第二开关s2,所述第六电阻r6一端和第一电阻r1一端连接,第二开关s2一端和第七三极管q7基极、第三二极管d3阳极、第四二极管d4阳极、第五二极管d5阳极连接,第七三极管q7集电极和第一可控硅d1阳极连接,第三二极管d3阴极和第四mos管q4栅极连接,第四二极管d4阴极和第五mos管q5栅极连接,第五二极管d5阴极和第六mos管q6栅极连接,第二开关s2另一端和电源连接,第七三极管q7发射极、第六电阻r6另一端和接地端连接。
3、进一步的,所述主控单元还包括第六二极管d6、第七二极管d7,所述第六二极管d6阳极串接在第四mos管q4漏极上,第七二极管d7阳极串接在第五mos管q5漏极上,第六二极管d6阴极、第七二极管d7阴极和第四电阻r4一端连接。
4、进一步的,所述主控单元还包括第七电阻r7、第八电阻r8、第九电阻r9、第十电阻r10、第十一电位器r11,所述第七电阻r7一端和接地端连接,第七电阻r7另一端和第三运算放大器u3反相端、第八电阻r8一端连接,第八电阻r8另一端和第二运算放大器u2反相端、第九电阻r9一端连接,第九电阻r9另一端和第一运算放大器u1反相端、第十电阻r10一端连接,第十电阻r10另一端和第十一电位器r11一端连接,第十一电位器r11抽头端、第十一电位器r11另一端和电源连接。
5、进一步的,所述主控单元还包括第一连接端p1、第二连接端p2、第三连接端p3,所述第一连接端p1和第四电阻r4一端连接,第二连接端p2和第一电容c1一端连接,第三连接端p3和第二开关s2一端连接,所述第一连接端p1、第二连接端p2、第三连接端p3用于和外挂单元连接。
6、进一步的,所述外挂单元包括第四运算放大器u4、第八mos管q8、第八二极管d8、第九二极管d9、第n输出引脚pa_n、第n输入引脚pa_n-1,所述第四运算放大器u4同相端和第二连接端p2连接,第四运算放大器u4输出端和第八mos管q8源极、第n输入引脚pa_n-1连接,第八mos管q8栅极和第n输出引脚pa_n、第八二极管d8阴极连接,第八二极管d8阳极和第三连接端p3连接,第八mos管q8漏极和第九二极管d9阳极连接,第九二极管d9阴极和第一连接端p1连接。
7、进一步的,所述主控单元还包括第十二电阻r12,所述第十二电阻r12一端和第一mos管q1栅极连接,第十二电阻r12另一端和接地端连接。
8、进一步的,所述主控单元还包括第十三电阻r13、第十四电阻r14,所述第十三电阻r13一端和第二二极管d2基极连接,第十四电阻r14一端和第一可控硅d1控制极连接,第十三电阻r13另一端、第十四电阻r14另一端和接地端连接。
9、本发明与现有技术相比的有益效果是:
10、本发明可以根据使用者的不同的需求,对所需的功能进行diy控制,无需进行编程,同时提供外挂功能进行增容。
技术特征:
1.一种智能康养机器人控制电路,其特征在于,包括主控单元和外挂单元,所述主控单元包括第一运算放大器、第二运算放大器、第三运算放大器、第一电阻、第二电阻、第三电阻、第四电阻、第五电阻、第一mos管、第二三极管、第三三极管、第四mos管、第五mos管、第六mos管、第一可控硅、第二二极管、第一开关、第一输出引脚、第二输出引脚、第三输出引脚、第一输入引脚、第二输入引脚、第三输入引脚和第一电容,所述第一开关一端和第一mos管栅极连接,第一mos管漏极和第一电阻一端连接,第一mos管源极和第二三极管基极连接,第二三极管发射极和第一可控硅控制极连接,第一可控硅阳极和第二电阻一端连接,第一可控硅阴极和第二二极管阳极、第三三极管发射极连接,第三三极管基极和第四电阻一端连接,第三三极管集电极和第三电阻一端连接,第三电阻另一端和第五电阻一端、第一运算放大器同相端、第二运算放大器同相端、第三运算放大器同相端、第一电容一端连接,第一运算放大器输出端和第四mos管源极、第三输入引脚连接,第四mos管栅极和第三输出引脚连接,第二运算放大器输出端和第五mos管源极、第二输入引脚连接,第五mos管栅极和第二输出引脚连接,第三运算放大器输出端和第六mos管源极、第一输入引脚连接,第六mos管栅极和第一输出引脚连接,第六mos管漏极和第四电阻一端连接,第一开关另一端、第一电阻另一端、第二电阻另一端、第二三极管集电极和电源连接,第二二极管阴极、第四电阻另一端、第一电容另一端、第五电阻另一端和接地端连接。
2.根据权利要求1所述的智能康养机器人控制电路,其特征在于,所述主控单元还包括,第六电阻、第七三极管、第三二极管、第四二极管、第五二极管、第二开关,所述第六电阻一端和第一电阻一端连接,第二开关一端和第七三极管基极、第三二极管阳极、第四二极管阳极、第五二极管阳极连接,第七三极管集电极和第一可控硅阳极连接,第三二极管阴极和第四mos管栅极连接,第四二极管阴极和第五mos管栅极连接,第五二极管阴极和第六mos管栅极连接,第二开关另一端和电源连接,第七三极管发射极、第六电阻另一端和接地端连接。
3.根据权利要求1所述的智能康养机器人控制电路,其特征在于,所述主控单元还包括第六二极管、第七二极管,所述第六二极管阳极串接在第四mos管漏极上,第七二极管阳极串接在第五mos管漏极上,第六二极管阴极、第七二极管阴极和第四电阻一端连接。
4.根据权利要求1所述的智能康养机器人控制电路,其特征在于,所述主控单元还包括第七电阻、第八电阻、第九电阻、第十电阻、第十一电位器,所述第七电阻一端和接地端连接,第七电阻另一端和第三运算放大器反相端、第八电阻一端连接,第八电阻另一端和第二运算放大器反相端、第九电阻一端连接,第九电阻另一端和第一运算放大器反相端、第十电阻一端连接,第十电阻另一端和第十一电位器一端连接,第十一电位器抽头端、第十一电位器另一端和电源连接。
5.根据权利要求1所述的智能康养机器人控制电路,其特征在于,所述主控单元还包括第一连接端、第二连接端、第三连接端,所述第一连接端和第四电阻一端连接,第二连接端和第一电容一端连接,第三连接端和第二开关一端连接,所述第一连接端、第二连接端、第三连接端用于和外挂单元连接。
6.根据权利要求1所述的智能康养机器人控制电路,其特征在于,所述外挂单元包括第四运算放大器、第八mos管、第八二极管、第九二极管、第n输出引脚、第n输入引脚,所述第四运算放大器同相端和第二连接端连接,第四运算放大器输出端和第八mos管源极、第n输入引脚连接,第八mos管栅极和第n输出引脚、第八二极管阴极连接,第八二极管阳极和第三连接端连接,第八mos管漏极和第九二极管阳极连接,第九二极管阴极和第一连接端连接。
7.根据权利要求1所述的智能康养机器人控制电路,其特征在于,所述主控单元还包括第十二电阻,所述第十二电阻一端和第一mos管栅极连接,第十二电阻另一端和接地端连接。
8.根据权利要求1所述的智能康养机器人控制电路,其特征在于,所述主控单元还包括第十三电阻、第十四电阻,所述第十三电阻一端和第二二极管基极连接,第十四电阻一端和第一可控硅控制极连接,第十三电阻另一端、第十四电阻另一端和接地端连接。
技术总结
本发明公开了一种智能康养机器人控制电路,涉及医疗设备技术领域,包括主控单元和外挂单元,主控单元包括第一运算放大器、第二运算放大器、第三运算放大器、第一电阻、第二电阻、第三电阻、第四电阻、第五电阻、第一MOS管、第二三极管、第三三极管、第四MOS管、第五MOS管、第六MOS管、第一可控硅、第二二极管、第一开关、第一输出引脚、第二输出引脚、第三输出引脚、第一输入引脚、第二输入引脚、第三输入引脚、第一电容。本发明可以根据不同的康养需求进行傻瓜式DIY设置,无需重新进行编程。
技术研发人员:李新泰
受保护的技术使用者:山东商业职业技术学院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!