一种地脚灯控制方法、装置、计算机设备以及存储介质与流程
本发明涉及智能灯具的,尤其是涉及一种地脚灯控制方法、装置、计算机设备以及存储介质。
背景技术:
1、目前,地脚灯是一种安装在靠近地面的照明灯,安装室内房屋中的地脚灯一般内置有人体感应装置,因此,在当地脚灯安装在室内房屋中时,主要的用途是在室内无灯光时,若感应到用户的运动,则会自动开灯为用户提供照明,降低用户在室内无灯光的情况下受伤的概率。但现在越来越多的家庭开始饲养宠物,当宠物运动时,若地脚灯不能识别运动对象是人还是宠物从而自动开灯,则会导致能源的浪费,且会对用户的困扰。
2、因此,相关技术中,在地脚灯内安装有能够分辨人体和宠物的传感器,解决了地脚灯不能识别运动对象是人还是宠物的问题。但是,此类能够分辨人体和宠物的传感器价格比较昂贵,使得地脚灯的成本较高。
技术实现思路
1、为了降低能够辨别人和宠物的地脚灯的经济成本,本技术提供一种地脚灯控制方法、装置、计算机设备以及存储介质。
2、第一方面,本技术的上述发明目的是通过以下技术方案得以实现的:
3、一种地脚灯控制方法,所述地脚灯控制方法包括:
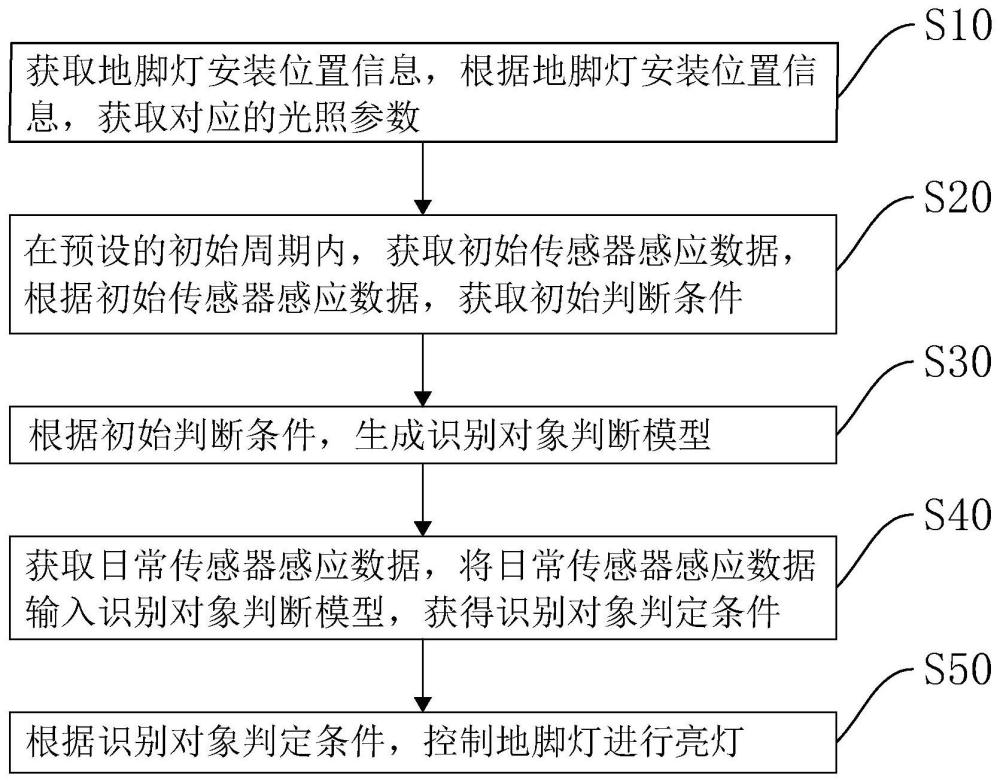
4、获取地脚灯安装位置信息,根据所述地脚灯安装位置信息,获取对应的光照参数;
5、在预设的初始周期内,获取初始传感器感应数据,根据所述初始传感器感应数据,获取初始判断条件;
6、根据所述初始判断条件,生成识别对象判断模型;
7、获取日常传感器感应数据,将所述日常传感器感应数据输入所述识别对象判断模型,获得识别对象判定条件;
8、根据所述识别对象判定条件,控制地脚灯进行亮灯。
9、通过采用上述技术方案,在地脚灯安装完成后,首先要根据地脚灯的安装位置判断适用于当前的安装位置的地脚灯的亮灯参数,例如,若地脚灯是安装在楼梯上,而地脚灯的初始照明参数中的照明范围较小,则当用户在楼梯上行走时,照明范围较小,用户无法看清前后方的阶梯,使得地脚灯的作用效果大大降低;在预设的用于地脚灯学习识别对象的特点的初始周期内,记录收集地脚灯中的传感器检测的所有数据,通过传感器检测的数据,判断在传感器检测的数据为何值时,识别对象为宠物或人,以此生成判断模型,并将后续传感器检测的数据均输入该判断模型中训练模型,以此得到能够根据传感器的检测数据判定识别对象为宠物或人的条件。基于此,在不使用能够辨别人和宠物的传感器的情况下,实现了地脚灯辨别人和宠物的功能,进而实现降低能够辨别人和宠物的地脚灯的经济成本的效果。
10、本技术在一较佳示例中可以进一步配置为:所述获取地脚灯安装位置信息,根据所述地脚灯安装位置信息,获取对应的光照参数,具体包括:
11、获取地脚灯安装位置信息,所述地脚灯安装位置信息包括地面间距、拐角间距和表示用户常去区域与地脚灯的间距的用户常去地间距;
12、根据所述地面间距和所述拐角间距,获取对应的光照参数。
13、通过采用上述技术方案,地面间距是指地脚灯与地面之间的距离,拐角间距是指从安装地脚灯的墙面拐角处与地脚灯之间的距离,将该地面间距和拐角间距,以及地脚灯的初始照明范围,判断地脚灯的照明范围是否能覆盖拐角处,若不能,则需要改变地脚灯的照明范围,以此,提高了地脚灯的实用性。
14、本技术在一较佳示例中可以进一步配置为:所述在预设的初始周期内,获取初始传感器感应数据,根据所述初始传感器感应数据,获取初始判断条件,具体包括:
15、在预设的初始周期内,获取初始传感器感应数据,所述初始传感器感应数据包括识别对象速度、识别对象跨步距离、识别对象红外反射率和识别对象活动时间;
16、根据所述识别对象速度、所述识别对象跨步距离、所述识别对象红外反射率和所述识别对象活动时间,查询预设的人宠差别信息表,获取初始判断条件。
17、通过采用上述技术方案,根据传感器感应数据,即识别对象速度、识别对象跨步距离、识别对象红外反射率和识别对象活动时间,该传感器感应数据中的数据均是通过实验调查获取的,人和宠物之间具有明显差距的参数,例如,跨步距离即表示传感器检测的识别对象在传感器的检测范围内单次行走时的间距,宠物一般是猫和狗,而一般的猫和狗的跨步距离均小于人,因此,通过在初始周期内传感器感应数据表示的地脚灯安装位置的实际数据,判断用户以及用户的宠物的特点,形成初步辨别人和宠物的初始判断条件,保障地脚灯辨别人和宠物的效果。
18、本技术在一较佳示例中可以进一步配置为:在所述在预设的初始周期内,获取初始传感器感应数据,所述初始传感器感应数据包括识别对象速度、识别对象跨步距离、识别对象红外反射率和识别对象活动时间之后,所述地脚灯控制方法还包括:
19、在预设的初始周期内地脚灯亮灯时,获取识别对象速度变化信息和识别对象大小变化信息;
20、所述根据所述识别对象速度、所述识别对象跨步距离、所述识别对象红外反射率和所述识别对象活动时间,查询预设的人宠差别信息表,获取初始判断条件,具体包括:
21、根据所述识别对象速度变化信息、所述识别对象大小变化信息、所述识别对象速度、所述识别对象跨步距离、所述识别对象红外反射率和所述识别对象活动时间,查询预设的人宠差别信息表,获取初始判断条件。
22、通过采用上述技术方案,一般的,宠物对突然打开的灯光会比较好奇或比较害怕,因此,会加速靠近地脚灯或远离地脚灯,通过宠物的这个习性,在初始周期内,当地脚灯开启时,同时获取在传感器的识别范围内的识别对象的速度变化和大小变化,再判断该速度变化和大小变化是否正常,例如,判断该速度变化和大小变化是否大于预设的阈值,若是,判断该速度变化和大小变化不正常,则记录该速度变化和大小变化,将其作为辨别人和宠物的条件之一,以此,提高了地脚灯辨别人和宠物的正确率。
23、本技术在一较佳示例中可以进一步配置为:在所述根据所述识别对象判定条件,控制地脚灯进行亮灯之前,所述地脚灯控制方法还包括:
24、获取传感器初始识别范围,根据所述地脚灯安装位置信息和所述传感器初始识别范围,获取传感器实际识别范围;
25、根据所述传感器实际识别范围,获取表示用户在传感器的识别范围中停留的时长的用户识别停留时长;
26、根据所述用户识别停留时长,获得判定条件调整值;
27、所述根据所述识别对象判定条件,控制地脚灯进行亮灯,具体包括:
28、根据所述判定条件调整值调整所述识别对象判定条件,获得调整后判定条件;
29、根据所述调整后判定条件,控制地脚灯进行亮灯。
30、通过采用上述技术方案,传感器初始识别范围是指传感器初始的未经过改动的识别范围,根据地脚灯安装位置,若判断地脚灯的安装位置比较刁钻,例如,床底或墙角等,判断传感器的识别范围是否会被缩小,得到传感器的实际能够识别的范围,进而再判断用户在地脚灯中的传感器的识别范围中停留的时长,若根据该用户在地脚灯中的传感器的识别范围中停留的时长较短,则传感器难以检测到用户的更多数据,进而使得地脚灯的辨别能力下降,因此,根据该用户在地脚灯中的传感器的识别范围中停留的时长,判断获得的判定条件调整值是指减少判定条件的数量,即若用户在地脚灯中的传感器的识别范围中停留的时长较短时,则无需使用识别对象判定条件中的所有条件来辨别识别对象是人还是宠物,只需使用部分的条件进行辨别即可,以此,在地脚灯的安装位置比较刁钻时,保障地脚灯辨别人和宠物的能力。
31、第二方面,本技术的上述发明目的是通过以下技术方案得以实现的:
32、一种地脚灯控制装置,所述地脚灯控制装置包括:
33、光照参数获取模块, 用于获取地脚灯安装位置信息,根据所述地脚灯安装位置信息,获取对应的光照参数;
34、初始判断条件获取模块,用于在预设的初始周期内,获取初始传感器感应数据,根据所述初始传感器感应数据,获取初始判断条件;
35、识别对象判断模型生成模块,用于根据所述初始判断条件,生成识别对象判断模型;
36、识别对象判定条件获取模块,用于获取日常传感器感应数据,将所述日常传感器感应数据输入所述识别对象判断模型,获得识别对象判定条件;
37、地脚灯亮灯控制模块,用于根据所述识别对象判定条件,控制地脚灯进行亮灯。
38、可选的,所述光照参数获取模块包括:
39、地脚灯安装位置信息获取子模块,用于获取地脚灯安装位置信息,所述地脚灯安装位置信息包括地面间距和拐角间距;
40、光照参数获取子模块,用于根据所述地面间距和所述拐角间距,获取对应的光照参数。
41、可选的,所述初始判断条件获取模块包括:
42、初始传感器感应数据获取子模块,用于在预设的初始周期内,获取初始传感器感应数据,所述初始传感器感应数据包括识别对象速度、识别对象跨步距离、识别对象红外反射率和识别对象活动时间;
43、初始判断条件查询获取子模块,用于根据所述识别对象速度、所述识别对象跨步距离、所述识别对象红外反射率和所述识别对象活动时间,查询预设的人宠差别信息表,获取初始判断条件。
44、第三方面,本技术的上述发明目的是通过以下技术方案得以实现的:
45、一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述地脚灯控制方法的步骤。
46、第四方面,本技术的上述发明目的是通过以下技术方案得以实现的:
47、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述地脚灯控制方法的步骤。
48、综上所述,本技术包括以下至少一种有益技术效果:
49、1、在预设的用于地脚灯学习识别对象的特点的初始周期内,记录收集地脚灯中的传感器检测的所有数据,通过传感器检测的数据,判断在传感器检测的数据为何值时,识别对象为宠物或人,以此生成判断模型,并将后续传感器检测的数据均输入该判断模型中训练模型,以此得到能够根据传感器的检测数据判定识别对象为宠物或人的条件。基于此,在不使用能够辨别人和宠物的传感器的情况下,实现了地脚灯辨别人和宠物的功能,进而实现降低能够辨别人和宠物的地脚灯的经济成本的效果;
50、2、通过在初始周期内传感器感应数据表示的地脚灯安装位置的实际数据,判断用户以及用户的宠物的特点,形成初步辨别人和宠物的初始判断条件,保障地脚灯辨别人和宠物的效果;
51、3、若用户在地脚灯中的传感器的识别范围中停留的时长较短时,则无需使用识别对象判定条件中的所有条件来辨别识别对象是人还是宠物,只需使用部分的条件进行辨别即可,以此,在地脚灯的安装位置比较刁钻时,保障地脚灯辨别人和宠物的能力。
- 还没有人留言评论。精彩留言会获得点赞!