一种巡检无人机用掠影式图像采集系统及方法与流程
1.本发明涉及无人机设备领域,特别涉及一种巡检无人机用掠影式图像采集系统及方法。
背景技术:
2.电力巡检中常运用到无人机设备来提高线路巡查检测过程中的效率和检测精度,减小人眼观察等检测方式可能带来的检测偏差。
3.其中,无人机巡检设备大都采用图像采集技术来进行对指定线路中电力输送线缆和设备工况状态图像的采集,再通过对图像的数据分析来研判电路路线的正常与否,因而对图像采集过程的稳定性和高效性提出了较高的要求。
技术实现要素:
4.本发明的目的是提供一种巡检无人机用掠影式图像采集系统及方法,其优点是能够实现电力巡检过程中快速稳定的图像采集效果。
5.本发明的上述技术目的是通过以下技术方案得以实现的:一种巡检无人机用掠影式图像采集系统,包括模式输入模块、动作控制模块、介质存储模块和故障点识别模块,
6.所述模式输入模块包括指令输入模块和自主调整模块,
7.所述动作控制模块包括机体运动控制模块、图像采集控制模块和实时动作分析模块,所述机体运动控制模块包括悬停运动模块和飞掠运动模块,所述实时动作分析模块分别与机体运动控制模块和图像采集控制模块连接,
8.所述图像采集控制模块包括多组独立图像采集单元、图像处理模块以及单元控制模组,多组所述独立图像采集单元与单元控制模组连接,所述图像处理模块与单元控制模组连接,
9.所述介质存储模块则包括了临时数据录入存储单元、可移动数据读取单元和图像数据收集模块,所述临时数据录入存储单元与图像数据收集模块与图像处理模块连接,所述可移动数据读取单元与模式输入模块连接,
10.所述模式输入模块与可移动数据读取单元之间设有数据处理调用子模块,
11.所述故障点识别模块设于图像采集模块和介质存储模块之间。
12.进一步的:所述指令输入模块包括数据图采模式单元和常态巡检模式单元。
13.进一步的:所述实时动作分析模块包括参数记忆单元和实时参数校准单元。
14.进一步的:所述故障点识别模块包括快速对比模块、复检模块与二次读取模块。
15.进一步的:所述介质存储模块还包括了黑匣子模块。
16.进一步的:所述自主调整模块包括了环境分析模块和障碍物预警模块,所述环境分析模块包括了风力感应单元、可见度检测单元和防信号干扰模块。
17.进一步的,一种巡检无人机用掠影式图像采集方法,包括以下步骤:
18.s1、操作人员选择指定模式;
19.s2、系统收到指定模式指令,选择对应运动控制模块;
20.s3、不同运动控制模块选择下运行适配的单模或多模图像采集模块工作方式;
21.s4、故障点识别模块处理图像数据;
22.s5、运动采集相关图像数据录入介质存储模块。
23.综上所述,本发明具有以下有益效果:
24.1、满足在不同线路巡检需求下实现运行模式的切换,能够实现初次检测线路的前提下,操作人员通过飞行工作模式的选择控制无人机设备进行电力线路的初次完整巡检,伴随初次巡检过程中,触发悬停运动模块,无人机设备采取间断悬停的运动方式进行沿指定线路的飞行,同时独立图像采集单元进行图像采集工作,包括图像拍摄角度和聚焦参数等调整,同时实时动作分析模块则能够对应单位采集图像进行包括飞行姿态速率、拍摄参数等信息的分析和绑定,最终录入至介质存储模块中的临时数据录入存储单元;针对非首次巡检路线需求,无人机巡检设备再次对线路进行维护巡检时,操作人员选择飞掠运动模块进行实际图采飞行,针对介质存储模块中已经备份的指定线路采集的相关参数能够辅助无人机进行快速的速率参数和拍摄角度等的读取,多组独立图像采集单元能够实现独立且连贯的拍摄参数调节,形成在高速飞行姿态下针对长距离连续线路的无差别截取图采过程,且多度独立图像采集单元在单元控制模组的控制下能够依次连续实现分布工作,实时进行差异化的拍摄参数实现,最终独立图像采集单元获得的图像信息形成联系图形信息,反应完整线路状态,并经过故障点识别模块的研判分析后存入介质存储模块,完成完整的电力巡检过程。
附图说明
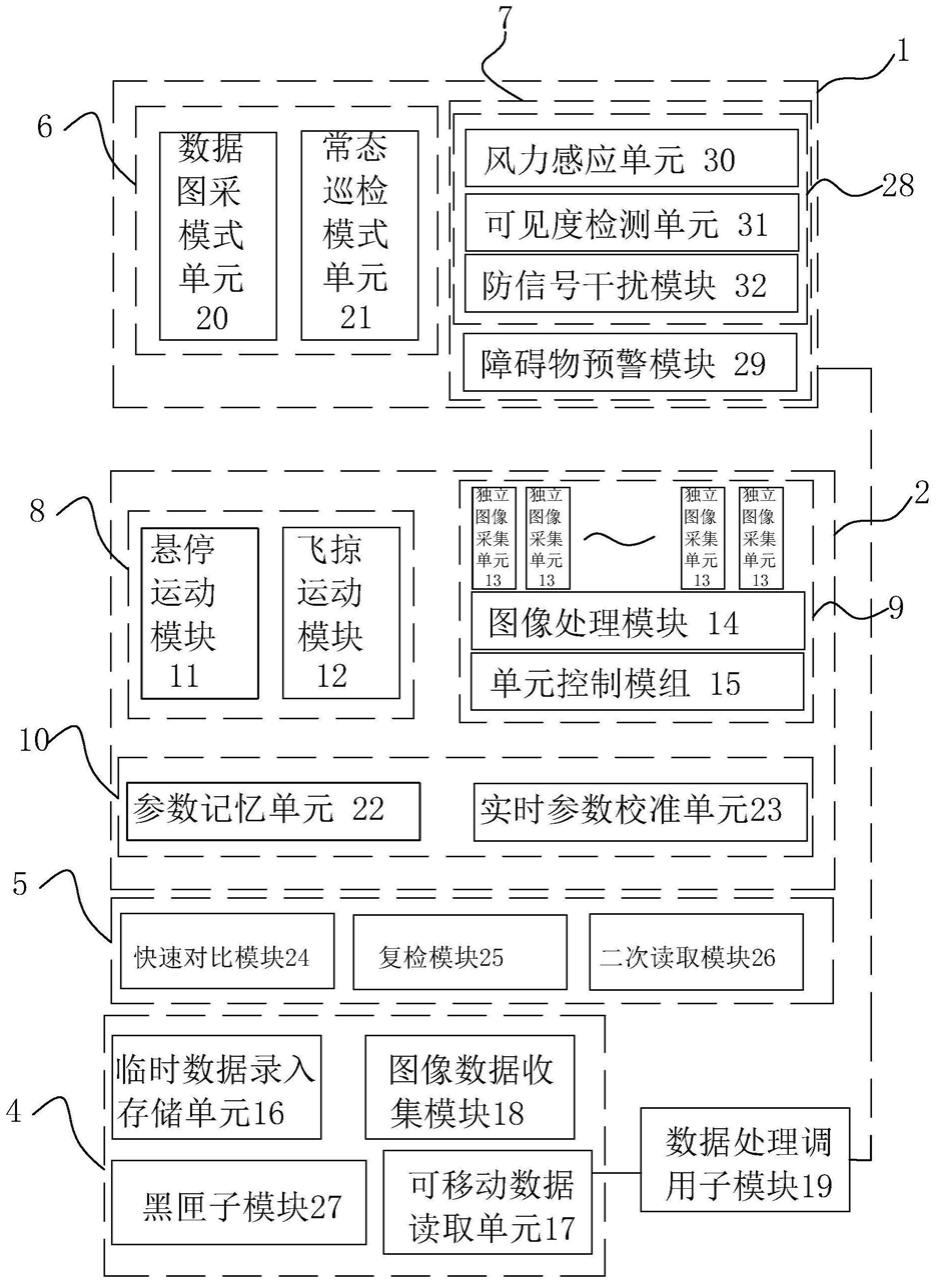
25.图1是用于展现实施例中系统结构图;
26.图2是用于展现实施例中方法步骤图。
27.附图标记:1、模式输入模块;2、动作控制模块;4、介质存储模块;5、故障点识别模块;6、指令输入模块;7、自主调整模块;8、机体运动控制模块;9、图像采集控制模块;10、实时动作分析模块;11、悬停运动模块;12、飞掠运动模块;13、独立图像采集单元;14、图像处理模块;15、单元控制模组;16、临时数据录入存储单元;17、可移动数据读取单元;18、图像数据收集模块;19、数据处理调用子模块;20、数据图采模式单元;21、常态巡检模式单元;22、参数记忆单元;23、实时参数校准单元;24、快速对比模块;25、复检模块;26、二次读取模块;27、黑匣子模块;28、环境分析模块;29、障碍物预警模块;30、风力感应单元;31、可见度检测单元;32、防信号干扰模块。
具体实施方式
28.以下结合附图对本发明作进一步详细说明。
29.实施例:一种巡检无人机用掠影式图像采集系统及方法,如图1和图2所示,包括了模式输入模块1、动作控制模块2、介质存储模块4和故障点识别模块5,具体步骤如下:
30.s1、针对不同的巡检需求操作人员选择特定巡检实现模式,主要判断依据为是否为初次检测电力线路。其中,模式输入模块1包括指令输入模块6和自主调整模块7,指令输入模块6开始实现工作,其包括了数据图采模式单元20和常态巡检模式单元21,
31.其中数据图采模式单元20对应针对处理首次检测电力线路路径需求,
32.常态巡检模式单元21则为针对某一电力线路的多次常态化线路复检模式需求,
33.由于无人机实际飞行过程中需要路径导航,操作人员需率先将指定待检电路线路的线路路径信息存储在介质存储模块4中,介质存储模块4中包括了一种可移动数据读取单元17,供操作人员针对不同电力路线进行手动的导航参数输入,而在模式输入模块1与可移动数据读取单元17之间设有数据处理调用子模块19,能够即时调取不同电路路线的具体飞行导航信息,
34.为了尽可能保障飞行过程的稳定,自主调整模块7能够进行飞行姿态保障工作,包括了环境分析模块28和障碍物预警模块29,环境分析模块28包括了风力感应单元30、可见度检测单元31和防信号干扰模块32,能够应对复杂环境下的飞行工作;
35.s2、系统收到指定模式指令,选择对应运动控制模块,动作控制模块2包括机体运动控制模块8,机体运动控制模块8则包括悬停运动模块11和飞掠运动模块12:
36.(1)数据图采模式单元20工作
37.运动控制模块切换至悬停运动模块11,主要表现为沿指定路径间断性悬停和短距离直线飞行;
38.(2)常态巡检模式单元21工作
39.该模式开启的前提是已经完成过对指定电力路线的数据图采模式单元20飞行过程后,才能够实现启动飞掠运动模块12,需要以数据图采模式单元20飞行结果为飞行依据,从介质存储模块4中进行预采数据的读取,具体表现为高速飞行通过指定线路路径;
40.s3、不同运动控制模块选择下需运行适配的单模或多模图像采集模块3工作方式,实现差别化的拍摄实现过程,
41.动作控制模块2还包括图像采集控制模块9和实时动作分析模块10,图像采集控制模块9包括多组独立图像采集单元13、图像处理模块14以及单元控制模组15,多组独立图像采集单元13与单元控制模组15连接,图像处理模块14与单元控制模组15连接,
42.实时动作分析模块10包括参数记忆单元22和实时参数校准单元23,实时动作分析模块10分别与机体运动控制模块8和图像采集控制模块9连接:
43.(1)、悬停运动模块11启动
44.单元控制模组15控制下实现仅单组独立图像采集单元13的工作,实时动作分析模块10同步进行工作,通过其与机体运动控制模块8以及图像采集控制模块9的连接实现对无人机瞬时拍摄成像状态下无人机飞行速率和图像采集设备拍摄角度和其他拍摄参数等数据的即时记忆,并实现与单组独立图像采集单元13获取的图像实现绑定,图像处理模块14实现对即时成像的处理过程;
45.(2)、飞掠运动模块12启动
46.单元控制模组15控制下实现多组独立图像采集单元13的协同工作,独立图像采集单元13针对连续线路实现碎片化的图采过程,同一过程中主要依靠读取临时数据录入存储单元16中相关飞行速率参数和指定区域拍摄角度等拍摄参数实现快速精准的调整,多组独立图像采集单元13有序分配拍摄参数,并匹配飞行速率,形成对连续电力线路的覆盖,从而实现高效快速的电力线路图像采集,最终在单元控制模组15的作用下实现碎片化图像信息的整合,并在图像处理模块14的工作下实现连续电力线路图像信息的复原过程;
47.s4、故障点识别模块5处理相关图像数据,故障点识别模块5设于图像采集模块3和介质存储模块4之间,包括快速对比模块24、复检模块25与二次读取模块26,实现对图像参数的分析研判,对异常图像信息进行二次复检,保障实时分析结果的可靠,最终处理完的数据进入后续存储模块;
48.s5、运动采集相关图像数据录入介质存储模块4,介质存储模块4则包括了临时数据录入存储单元16、可移动数据读取单元17、图像数据收集模块18和黑匣子模块27。临时数据录入存储单元16与图像数据收集模块18与图像处理模块14连接,可移动数据读取单元17与模式输入模块1连接,主要包括四个数据录入过程:
49.(1)、临时数据录入存储单元16的工作主要是对数据图采模式单元20和悬停运动模块11工作状态下采集的电力线路图像数据的录入,供常态巡检模式单元21和飞掠运动模块12工作时调取;
50.(2)、图像数据收集模块18则是实际电力路线巡检结果的录入,经由故障点识别模块5识别处理后的图像实现收储,供操作人员对电力路线故障点的研判和信息获取;
51.(3)、可移动数据读取单元17的工作则主要是操作人员手动录入相关电力路线飞行导航信息规划;
52.(4)、黑匣子模块27仅作为对无人机飞行数据的采集便于突发状况下的数据恢复。
53.本具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1